 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafeShift: Safety-Informed Distribution Shifts for Robust Trajectory Prediction in Autonomous Driving
Sep 16, 2023As autonomous driving technology matures, safety and robustness of its key components, including trajectory prediction, is vital. Though real-world datasets, such as Waymo Open Motion, provide realistic recorded scenarios for model development, they often lack truly safety-critical situations. Rather than utilizing unrealistic simulation or dangerous real-world testing, we instead propose a framework to characterize such datasets and find hidden safety-relevant scenarios within. Our approach expands the spectrum of safety-relevance, allowing us to study trajectory prediction models under a safety-informed, distribution shift setting. We contribute a generalized scenario characterization method, a novel scoring scheme to find subtly-avoided risky scenarios, and an evaluation of trajectory prediction models in this setting. We further contribute a remediation strategy, achieving a 10% average reduction in prediction collision rates. To facilitate future research, we release our code to the public: github.com/cmubig/SafeShift
T2FPV: Constructing High-Fidelity First-Person View Datasets From Real-World Pedestrian Trajectories
Sep 22, 2022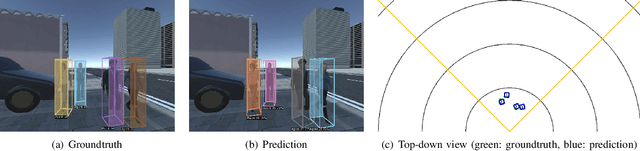
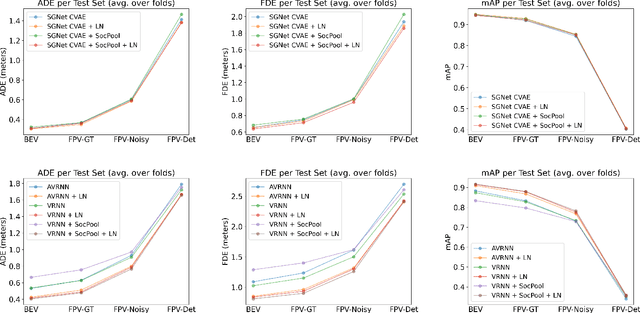
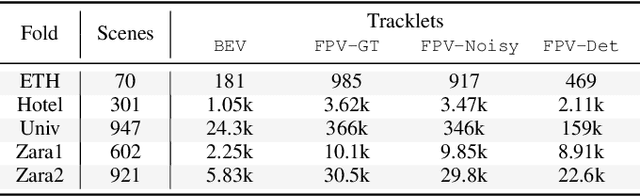
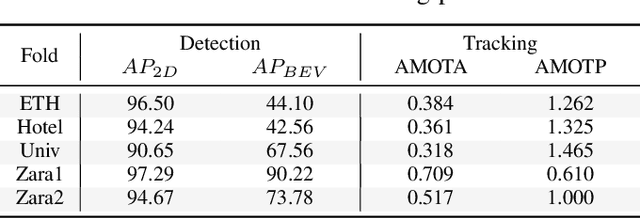
Predicting pedestrian motion is essential for developing socially-aware robots that interact in a crowded environment. While the natural visual perspective for a social interaction setting is an egocentric view, the majority of existing work in trajectory prediction has been investigated purely in the top-down trajectory space. To support first-person view trajectory prediction research, we present T2FPV, a method for constructing high-fidelity first-person view datasets given a real-world, top-down trajectory dataset; we showcase our approach on the ETH/UCY pedestrian dataset to generate the egocentric visual data of all interacting pedestrians. We report that the bird's-eye view assumption used in the original ETH/UCY dataset, i.e., an agent can observe everyone in the scene with perfect information, does not hold in the first-person views; only a fraction of agents are fully visible during each 20-timestep scene used commonly in existing work. We evaluate existing trajectory prediction approaches under varying levels of realistic perception -- displacement errors suffer a 356% increase compared to the top-down, perfect information setting. To promote research in first-person view trajectory prediction, we release our T2FPV-ETH dataset and software tools.