 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploiting Large Neuroimaging Datasets to Create Connectome-Constrained Approaches for more Robust, Efficient, and Adaptable Artificial Intelligence
May 26, 2023Despite the progress in deep learning networks, efficient learning at the edge (enabling adaptable, low-complexity machine learning solutions) remains a critical need for defense and commercial applications. We envision a pipeline to utilize large neuroimaging datasets, including maps of the brain which capture neuron and synapse connectivity, to improve machine learning approaches. We have pursued different approaches within this pipeline structure. First, as a demonstration of data-driven discovery, the team has developed a technique for discovery of repeated subcircuits, or motifs. These were incorporated into a neural architecture search approach to evolve network architectures. Second, we have conducted analysis of the heading direction circuit in the fruit fly, which performs fusion of visual and angular velocity features, to explore augmenting existing computational models with new insight. Our team discovered a novel pattern of connectivity, implemented a new model, and demonstrated sensor fusion on a robotic platform. Third, the team analyzed circuitry for memory formation in the fruit fly connectome, enabling the design of a novel generative replay approach. Finally, the team has begun analysis of connectivity in mammalian cortex to explore potential improvements to transformer networks. These constraints increased network robustness on the most challenging examples in the CIFAR-10-C computer vision robustness benchmark task, while reducing learnable attention parameters by over an order of magnitude. Taken together, these results demonstrate multiple potential approaches to utilize insight from neural systems for developing robust and efficient machine learning techniques.
Synthetic-to-Real Domain Adaptation for Action Recognition: A Dataset and Baseline Performances
Mar 17, 2023
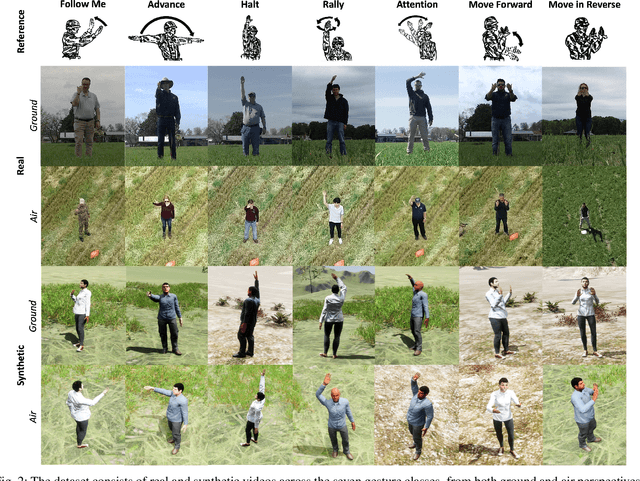
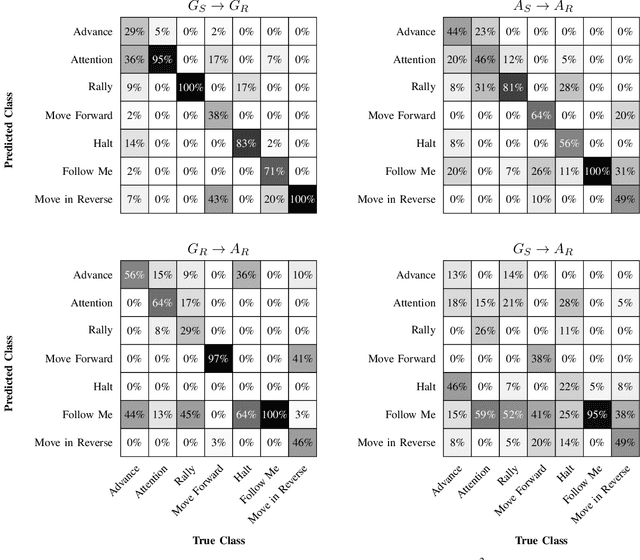
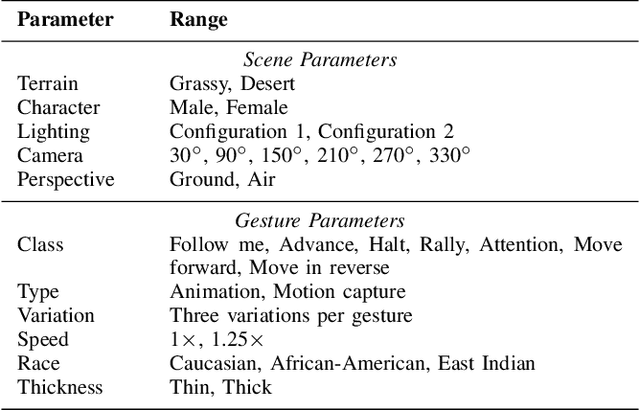
Human action recognition is a challenging problem, particularly when there is high variability in factors such as subject appearance, backgrounds and viewpoint. While deep neural networks (DNNs) have been shown to perform well on action recognition tasks, they typically require large amounts of high-quality labeled data to achieve robust performance across a variety of conditions. Synthetic data has shown promise as a way to avoid the substantial costs and potential ethical concerns associated with collecting and labeling enormous amounts of data in the real-world. However, synthetic data may differ from real data in important ways. This phenomenon, known as \textit{domain shift}, can limit the utility of synthetic data in robotics applications. To mitigate the effects of domain shift, substantial effort is being dedicated to the development of domain adaptation (DA) techniques. Yet, much remains to be understood about how best to develop these techniques. In this paper, we introduce a new dataset called Robot Control Gestures (RoCoG-v2). The dataset is composed of both real and synthetic videos from seven gesture classes, and is intended to support the study of synthetic-to-real domain shift for video-based action recognition. Our work expands upon existing datasets by focusing the action classes on gestures for human-robot teaming, as well as by enabling investigation of domain shift in both ground and aerial views. We present baseline results using state-of-the-art action recognition and domain adaptation algorithms and offer initial insight on tackling the synthetic-to-real and ground-to-air domain shifts.