 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePreserving Full 6-DOF Actuation Under Abrupt Total Rotor Failures: Passive Fault-Tolerant Flight Control Using a Biaxial-Tilt Hexacopter
Jun 04, 2026Conventional multirotors suffer from a rapid collapse of attainable wrench space (AWS) under abrupt total rotor failures, rendering full 6-DOF recovery physically impossible. This paper addresses passive fault-tolerant flight of a biaxial-tilt overactuated hexacopter (BTO) under abrupt total rotor failures that are a priori unknown to the controller. The control design and analysis focus on representative abrupt rotor-failure cases for which the post-failure system remains fully actuated, while no explicit fault detection, isolation, or fault-mode switching is assumed. First, we extend the inscribed-sphere metric of the AWS by incorporating the transient-wrench-jump term, enabling quantitative feasibility assessment under up to three simultaneous rotor failures and benchmarking against uniaxial-tilt and coplanar hexacopters. Second, we develop two computationally efficient passive schemes without relying on fault detection or online optimization. One scheme operates at the controller layer by combining a high-order fully actuated (HOFA) controller with a linear extended state observer (LESO) for lumped-disturbance rejection. The other scheme operates at the allocator layer by using model-reference adaptive control allocation with momentum-based wrench estimation to compensate for control-allocation biases. Simulations and flight experiments validate stable hovering and 6-DOF trajectory tracking under single and multiple rotor failures. Further systematic comparisons confirm that the BTO provides larger recovery margins than uniaxial-tilt and coplanar designs. Additional onboard-sensor-only experiments, including indoor tracking under wind disturbance, outdoor tracking under extreme conditions, narrow-frame traversal, and contact-based aerial writing, further validate the robustness of the proposed framework in complex operational environments.
Distribution-Aligned Decoding for Efficient LLM Task Adaptation
Sep 19, 2025Adapting billion-parameter language models to a downstream task is still costly, even with parameter-efficient fine-tuning (PEFT). We re-cast task adaptation as output-distribution alignment: the objective is to steer the output distribution toward the task distribution directly during decoding rather than indirectly through weight updates. Building on this view, we introduce Steering Vector Decoding (SVD), a lightweight, PEFT-compatible, and theoretically grounded method. We start with a short warm-start fine-tune and extract a task-aware steering vector from the Kullback-Leibler (KL) divergence gradient between the output distribution of the warm-started and pre-trained models. This steering vector is then used to guide the decoding process to steer the model's output distribution towards the task distribution. We theoretically prove that SVD is first-order equivalent to the gradient step of full fine-tuning and derive a globally optimal solution for the strength of the steering vector. Across three tasks and nine benchmarks, SVD paired with four standard PEFT methods improves multiple-choice accuracy by up to 5 points and open-ended truthfulness by 2 points, with similar gains (1-2 points) on commonsense datasets without adding trainable parameters beyond the PEFT adapter. SVD thus offers a lightweight, theoretically grounded path to stronger task adaptation for large language models.
Efficient Long CoT Reasoning in Small Language Models
May 24, 2025Recent large reasoning models such as DeepSeek-R1 exhibit strong complex problems solving abilities by generating long chain-of-thought (CoT) reasoning steps. It is challenging to directly train small language models (SLMs) to emerge long CoT. Thus, distillation becomes a practical method to enable SLMs for such reasoning ability. However, the long CoT often contains a lot of redundant contents (e.g., overthinking steps) which may make SLMs hard to learn considering their relatively poor capacity and generalization. To address this issue, we propose a simple-yet-effective method to prune unnecessary steps in long CoT, and then employ an on-policy method for the SLM itself to curate valid and useful long CoT training data. In this way, SLMs can effectively learn efficient long CoT reasoning and preserve competitive performance at the same time. Experimental results across a series of mathematical reasoning benchmarks demonstrate the effectiveness of the proposed method in distilling long CoT reasoning ability into SLMs which maintains the competitive performance but significantly reduces generating redundant reasoning steps.
Verifiable Format Control for Large Language Model Generations
Feb 06, 2025Recent Large Language Models (LLMs) have demonstrated satisfying general instruction following ability. However, small LLMs with about 7B parameters still struggle fine-grained format following (e.g., JSON format), which seriously hinder the advancements of their applications. Most existing methods focus on benchmarking general instruction following while overlook how to improve the specific format following ability for small LLMs. Besides, these methods often rely on evaluations based on advanced LLMs (e.g., GPT-4), which can introduce the intrinsic bias of LLMs and be costly due to the API calls. In this paper, we first curate a fully verifiable format following dataset VFF. In contrast to existing works often adopting external LLMs for instruction-following validations, every sample of VFF can be easily validated with a Python function. Further, we propose to leverage this verifiable feature to synthesize massive data for progressively training small LLMs, in order to improve their format following abilities. Experimental results highlight the prevalent limitations in the format following capabilities of 7B level open-source LLMs and demonstrate the effectiveness of our method in enhancing this essential ability.
MASSTAR: A Multi-Modal and Large-Scale Scene Dataset with a Versatile Toolchain for Surface Prediction and Completion
Mar 18, 2024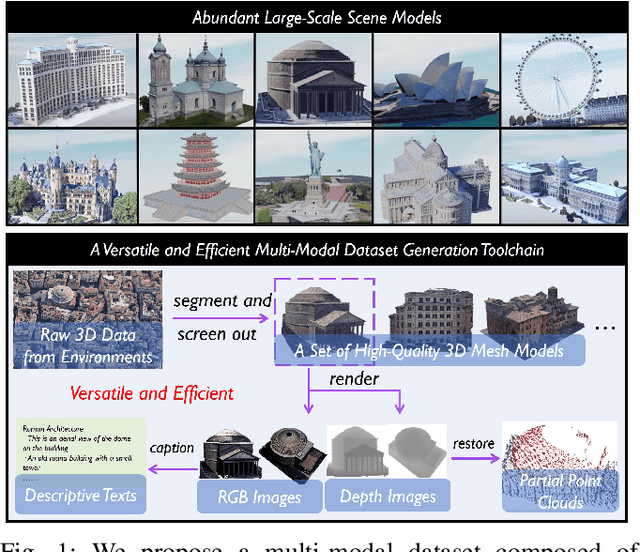
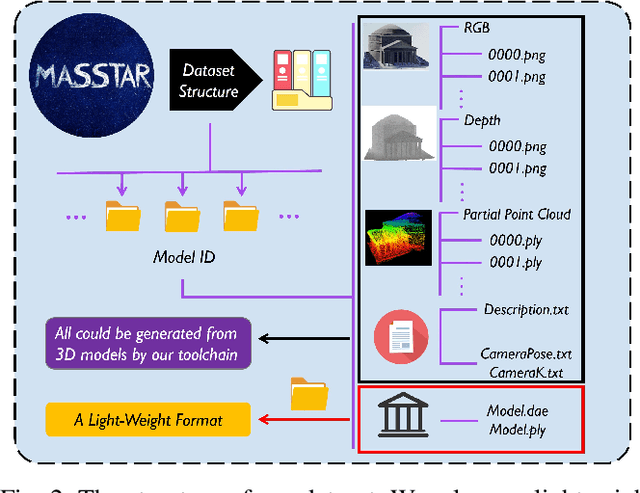
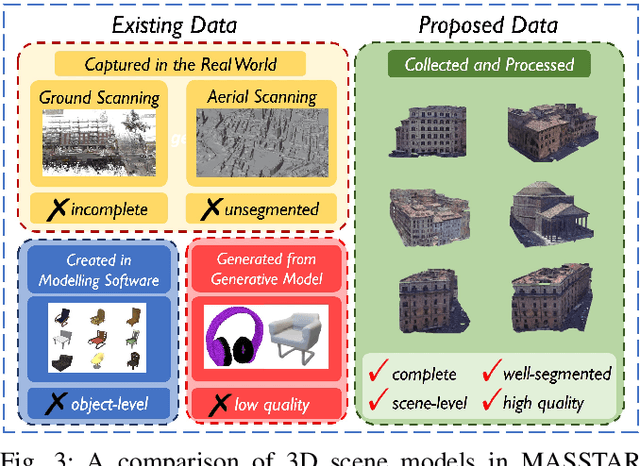
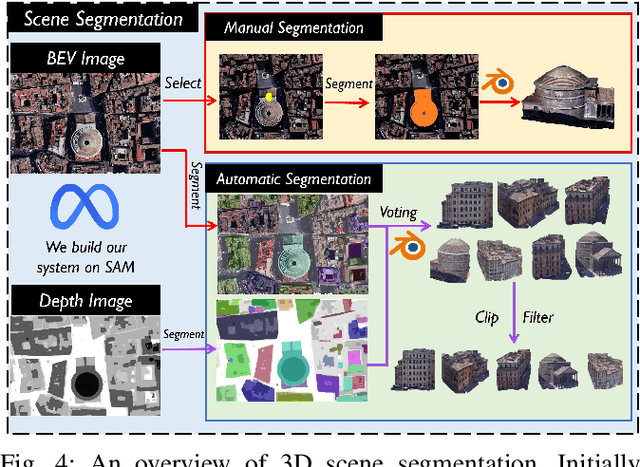
Surface prediction and completion have been widely studied in various applications. Recently, research in surface completion has evolved from small objects to complex large-scale scenes. As a result, researchers have begun increasing the volume of data and leveraging a greater variety of data modalities including rendered RGB images, descriptive texts, depth images, etc, to enhance algorithm performance. However, existing datasets suffer from a deficiency in the amounts of scene-level models along with the corresponding multi-modal information. Therefore, a method to scale the datasets and generate multi-modal information in them efficiently is essential. To bridge this research gap, we propose MASSTAR: a Multi-modal lArge-scale Scene dataset with a verSatile Toolchain for surfAce pRediction and completion. We develop a versatile and efficient toolchain for processing the raw 3D data from the environments. It screens out a set of fine-grained scene models and generates the corresponding multi-modal data. Utilizing the toolchain, we then generate an example dataset composed of over a thousand scene-level models with partial real-world data added. We compare MASSTAR with the existing datasets, which validates its superiority: the ability to efficiently extract high-quality models from complex scenarios to expand the dataset. Additionally, several representative surface completion algorithms are benchmarked on MASSTAR, which reveals that existing algorithms can hardly deal with scene-level completion. We will release the source code of our toolchain and the dataset. For more details, please see our project page at https://sysu-star.github.io/MASSTAR.
GraphInstruct: Empowering Large Language Models with Graph Understanding and Reasoning Capability
Mar 07, 2024Evaluating and enhancing the general capabilities of large language models (LLMs) has been an important research topic. Graph is a common data structure in the real world, and understanding graph data is a crucial part for advancing general intelligence. To evaluate and enhance the graph understanding abilities of LLMs, in this paper, we propose a benchmark named GraphInstruct, which comprehensively includes 21 classical graph reasoning tasks, providing diverse graph generation pipelines and detailed reasoning steps. Based on GraphInstruct, we further construct GraphLM through efficient instruction-tuning, which shows prominent graph understanding capability. In order to enhance the LLM with graph reasoning capability as well, we propose a step mask training strategy, and construct a model named GraphLM+. As one of the pioneering efforts to enhance the graph understanding and reasoning abilities of LLMs, extensive experiments have demonstrated the superiority of GraphLM and GraphLM+ over other LLMs. We look forward to more researchers exploring the potential of LLMs in the graph data mining domain through GraphInstruct. Our code for generating GraphInstruct is released publicly at: https://github.com/CGCL-codes/GraphInstruct.
FC-Planner: A Skeleton-guided Planning Framework for Fast Aerial Coverage of Complex 3D Scenes
Sep 25, 2023



3D coverage path planning for UAVs is a crucial problem in diverse practical applications. However, existing methods have shown unsatisfactory system simplicity, computation efficiency, and path quality in large and complex scenes. To address these challenges, we propose FC-Planner, a skeleton-guided planning framework that can achieve fast aerial coverage of complex 3D scenes without pre-processing. We decompose the scene into several simple subspaces by a skeleton-based space decomposition (SSD). Additionally, the skeleton guides us to effortlessly determine free space. We utilize the skeleton to efficiently generate a minimal set of specialized and informative viewpoints for complete coverage. Based on SSD, a hierarchical planner effectively divides the large planning problem into independent sub-problems, enabling parallel planning for each subspace. The carefully designed global and local planning strategies are then incorporated to guarantee both high quality and efficiency in path generation. We conduct extensive benchmark and real-world tests, where FC-Planner computes over 10 times faster compared to state-of-the-art methods with shorter path and more complete coverage. The source code will be open at https://github.com/HKUST-Aerial-Robotics/FC-Planner.