 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlyCo: Foundation Model-Empowered Drones for Autonomous 3D Structure Scanning in Open-World Environments
Jan 12, 2026Autonomous 3D scanning of open-world target structures via drones remains challenging despite broad applications. Existing paradigms rely on restrictive assumptions or effortful human priors, limiting practicality, efficiency, and adaptability. Recent foundation models (FMs) offer great potential to bridge this gap. This paper investigates a critical research problem: What system architecture can effectively integrate FM knowledge for this task? We answer it with FlyCo, a principled FM-empowered perception-prediction-planning loop enabling fully autonomous, prompt-driven 3D target scanning in diverse unknown open-world environments. FlyCo directly translates low-effort human prompts (text, visual annotations) into precise adaptive scanning flights via three coordinated stages: (1) perception fuses streaming sensor data with vision-language FMs for robust target grounding and tracking; (2) prediction distills FM knowledge and combines multi-modal cues to infer the partially observed target's complete geometry; (3) planning leverages predictive foresight to generate efficient and safe paths with comprehensive target coverage. Building on this, we further design key components to boost open-world target grounding efficiency and robustness, enhance prediction quality in terms of shape accuracy, zero-shot generalization, and temporal stability, and balance long-horizon flight efficiency with real-time computability and online collision avoidance. Extensive challenging real-world and simulation experiments show FlyCo delivers precise scene understanding, high efficiency, and real-time safety, outperforming existing paradigms with lower human effort and verifying the proposed architecture's practicality. Comprehensive ablations validate each component's contribution. FlyCo also serves as a flexible, extensible blueprint, readily leveraging future FM and robotics advances. Code will be released.
SOAR: Simultaneous Exploration and Photographing with Heterogeneous UAVs for Fast Autonomous Reconstruction
Sep 04, 2024Unmanned Aerial Vehicles (UAVs) have gained significant popularity in scene reconstruction. This paper presents SOAR, a LiDAR-Visual heterogeneous multi-UAV system specifically designed for fast autonomous reconstruction of complex environments. Our system comprises a LiDAR-equipped explorer with a large field-of-view (FoV), alongside photographers equipped with cameras. To ensure rapid acquisition of the scene's surface geometry, we employ a surface frontier-based exploration strategy for the explorer. As the surface is progressively explored, we identify the uncovered areas and generate viewpoints incrementally. These viewpoints are then assigned to photographers through solving a Consistent Multiple Depot Multiple Traveling Salesman Problem (Consistent-MDMTSP), which optimizes scanning efficiency while ensuring task consistency. Finally, photographers utilize the assigned viewpoints to determine optimal coverage paths for acquiring images. We present extensive benchmarks in the realistic simulator, which validates the performance of SOAR compared with classical and state-of-the-art methods. For more details, please see our project page at https://sysu-star.github.io/SOAR}{sysu-star.github.io/SOAR.
MASSTAR: A Multi-Modal and Large-Scale Scene Dataset with a Versatile Toolchain for Surface Prediction and Completion
Mar 18, 2024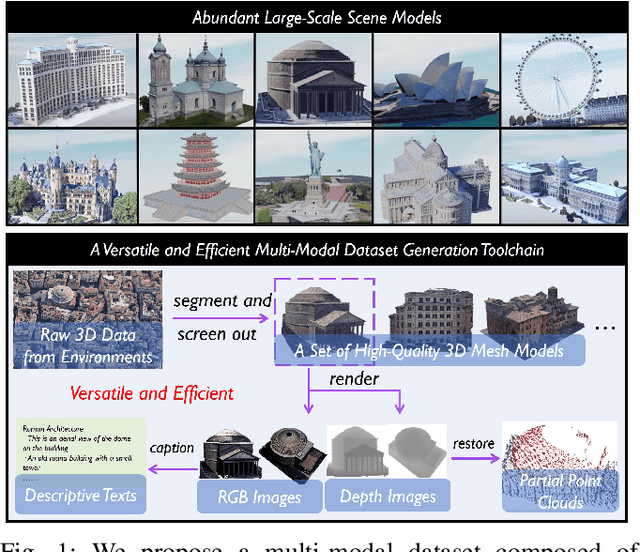
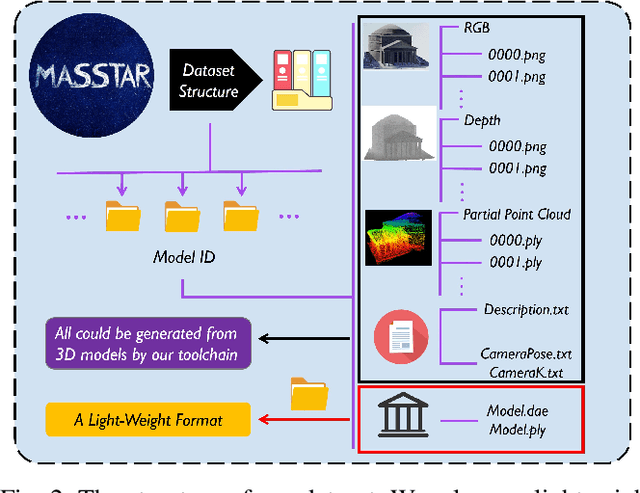
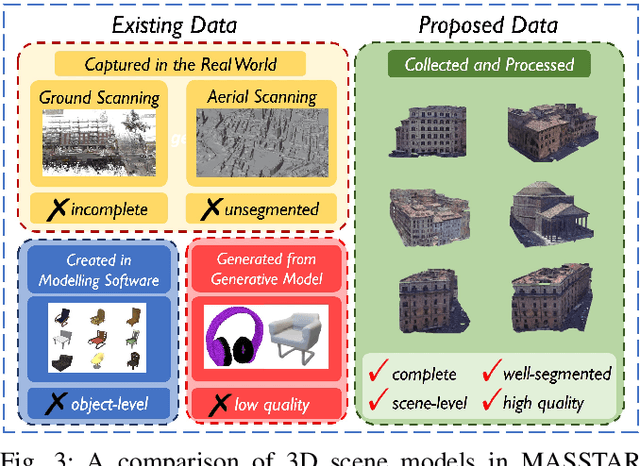
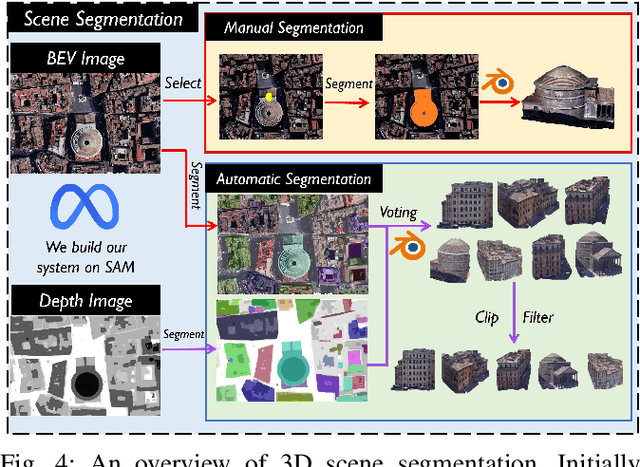
Surface prediction and completion have been widely studied in various applications. Recently, research in surface completion has evolved from small objects to complex large-scale scenes. As a result, researchers have begun increasing the volume of data and leveraging a greater variety of data modalities including rendered RGB images, descriptive texts, depth images, etc, to enhance algorithm performance. However, existing datasets suffer from a deficiency in the amounts of scene-level models along with the corresponding multi-modal information. Therefore, a method to scale the datasets and generate multi-modal information in them efficiently is essential. To bridge this research gap, we propose MASSTAR: a Multi-modal lArge-scale Scene dataset with a verSatile Toolchain for surfAce pRediction and completion. We develop a versatile and efficient toolchain for processing the raw 3D data from the environments. It screens out a set of fine-grained scene models and generates the corresponding multi-modal data. Utilizing the toolchain, we then generate an example dataset composed of over a thousand scene-level models with partial real-world data added. We compare MASSTAR with the existing datasets, which validates its superiority: the ability to efficiently extract high-quality models from complex scenarios to expand the dataset. Additionally, several representative surface completion algorithms are benchmarked on MASSTAR, which reveals that existing algorithms can hardly deal with scene-level completion. We will release the source code of our toolchain and the dataset. For more details, please see our project page at https://sysu-star.github.io/MASSTAR.