 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptively Coordinating with Novel Partners via Learned Latent Strategies
Nov 16, 2025Adaptation is the cornerstone of effective collaboration among heterogeneous team members. In human-agent teams, artificial agents need to adapt to their human partners in real time, as individuals often have unique preferences and policies that may change dynamically throughout interactions. This becomes particularly challenging in tasks with time pressure and complex strategic spaces, where identifying partner behaviors and selecting suitable responses is difficult. In this work, we introduce a strategy-conditioned cooperator framework that learns to represent, categorize, and adapt to a broad range of potential partner strategies in real-time. Our approach encodes strategies with a variational autoencoder to learn a latent strategy space from agent trajectory data, identifies distinct strategy types through clustering, and trains a cooperator agent conditioned on these clusters by generating partners of each strategy type. For online adaptation to novel partners, we leverage a fixed-share regret minimization algorithm that dynamically infers and adjusts the partner's strategy estimation during interaction. We evaluate our method in a modified version of the Overcooked domain, a complex collaborative cooking environment that requires effective coordination among two players with a diverse potential strategy space. Through these experiments and an online user study, we demonstrate that our proposed agent achieves state of the art performance compared to existing baselines when paired with novel human, and agent teammates.
Personalized Decision Supports based on Theory of Mind Modeling and Explainable Reinforcement Learning
Dec 13, 2023



In this paper, we propose a novel personalized decision support system that combines Theory of Mind (ToM) modeling and explainable Reinforcement Learning (XRL) to provide effective and interpretable interventions. Our method leverages DRL to provide expert action recommendations while incorporating ToM modeling to understand users' mental states and predict their future actions, enabling appropriate timing for intervention. To explain interventions, we use counterfactual explanations based on RL's feature importance and users' ToM model structure. Our proposed system generates accurate and personalized interventions that are easily interpretable by end-users. We demonstrate the effectiveness of our approach through a series of crowd-sourcing experiments in a simulated team decision-making task, where our system outperforms control baselines in terms of task performance. Our proposed approach is agnostic to task environment and RL model structure, therefore has the potential to be generalized to a wide range of applications.
Theory of Mind for Multi-Agent Collaboration via Large Language Models
Oct 22, 2023



While Large Language Models (LLMs) have demonstrated impressive accomplishments in both reasoning and planning, their abilities in multi-agent collaborations remains largely unexplored. This study evaluates LLM-based agents in a multi-agent cooperative text game with Theory of Mind (ToM) inference tasks, comparing their performance with Multi-Agent Reinforcement Learning (MARL) and planning-based baselines. We observed evidence of emergent collaborative behaviors and high-order Theory of Mind capabilities among LLM-based agents. Our results reveal limitations in LLM-based agents' planning optimization due to systematic failures in managing long-horizon contexts and hallucination about the task state. We explore the use of explicit belief state representations to mitigate these issues, finding that it enhances task performance and the accuracy of ToM inferences for LLM-based agents.
On the Role of Emergent Communication for Social Learning in Multi-Agent Reinforcement Learning
Feb 28, 2023Explicit communication among humans is key to coordinating and learning. Social learning, which uses cues from experts, can greatly benefit from the usage of explicit communication to align heterogeneous policies, reduce sample complexity, and solve partially observable tasks. Emergent communication, a type of explicit communication, studies the creation of an artificial language to encode a high task-utility message directly from data. However, in most cases, emergent communication sends insufficiently compressed messages with little or null information, which also may not be understandable to a third-party listener. This paper proposes an unsupervised method based on the information bottleneck to capture both referential complexity and task-specific utility to adequately explore sparse social communication scenarios in multi-agent reinforcement learning (MARL). We show that our model is able to i) develop a natural-language-inspired lexicon of messages that is independently composed of a set of emergent concepts, which span the observations and intents with minimal bits, ii) develop communication to align the action policies of heterogeneous agents with dissimilar feature models, and iii) learn a communication policy from watching an expert's action policy, which we term `social shadowing'.
Emergent Discrete Communication in Semantic Spaces
Aug 05, 2021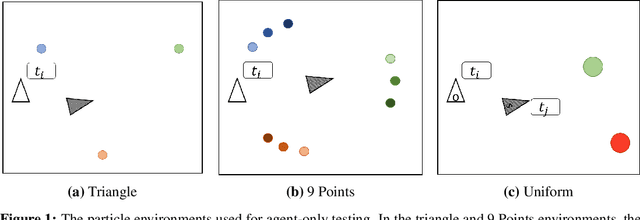

Neural agents trained in reinforcement learning settings can learn to communicate among themselves via discrete tokens, accomplishing as a team what agents would be unable to do alone. However, the current standard of using one-hot vectors as discrete communication tokens prevents agents from acquiring more desirable aspects of communication such as zero-shot understanding. Inspired by word embedding techniques from natural language processing, we propose neural agent architectures that enables them to communicate via discrete tokens derived from a learned, continuous space. We show in a decision theoretic framework that our technique optimizes communication over a wide range of scenarios, whereas one-hot tokens are only optimal under restrictive assumptions. In self-play experiments, we validate that our trained agents learn to cluster tokens in semantically-meaningful ways, allowing them communicate in noisy environments where other techniques fail. Lastly, we demonstrate both that agents using our method can effectively respond to novel human communication and that humans can understand unlabeled emergent agent communication, outperforming the use of one-hot communication.
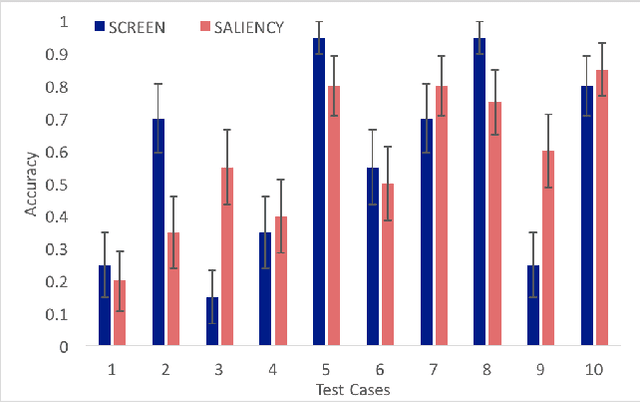
Hiding Leader's Identity in Leader-Follower Navigation through Multi-Agent Reinforcement Learning
Mar 10, 2021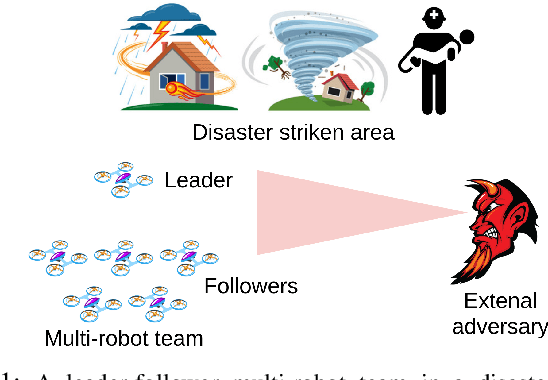
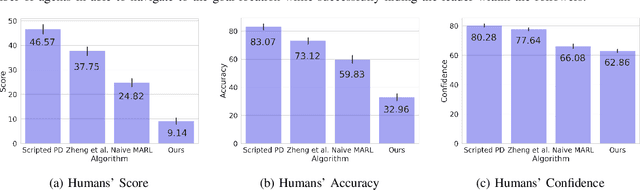
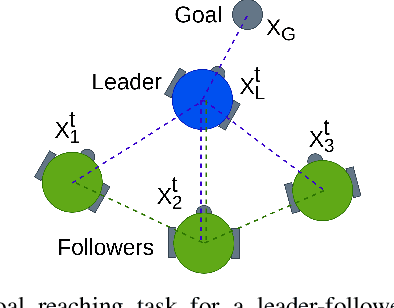
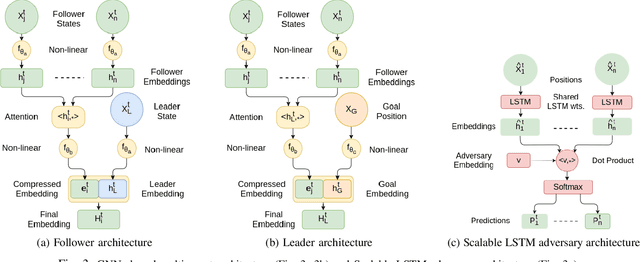
Leader-follower navigation is a popular class of multi-robot algorithms where a leader robot leads the follower robots in a team. The leader has specialized capabilities or mission critical information (e.g. goal location) that the followers lack which makes the leader crucial for the mission's success. However, this also makes the leader a vulnerability - an external adversary who wishes to sabotage the robot team's mission can simply harm the leader and the whole robot team's mission would be compromised. Since robot motion generated by traditional leader-follower navigation algorithms can reveal the identity of the leader, we propose a defense mechanism of hiding the leader's identity by ensuring the leader moves in a way that behaviorally camouflages it with the followers, making it difficult for an adversary to identify the leader. To achieve this, we combine Multi-Agent Reinforcement Learning, Graph Neural Networks and adversarial training. Our approach enables the multi-robot team to optimize the primary task performance with leader motion similar to follower motion, behaviorally camouflaging it with the followers. Our algorithm outperforms existing work that tries to hide the leader's identity in a multi-robot team by tuning traditional leader-follower control parameters with Classical Genetic Algorithms. We also evaluated human performance in inferring the leader's identity and found that humans had lower accuracy when the robot team used our proposed navigation algorithm.
Adaptive Agent Architecture for Real-time Human-Agent Teaming
Mar 07, 2021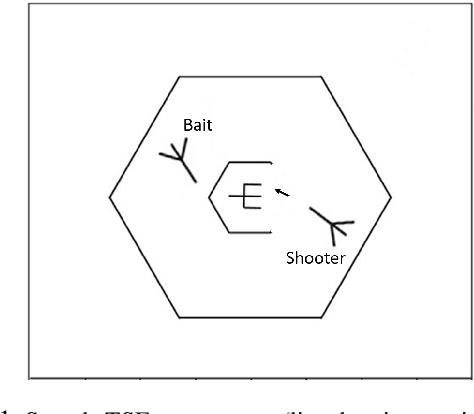
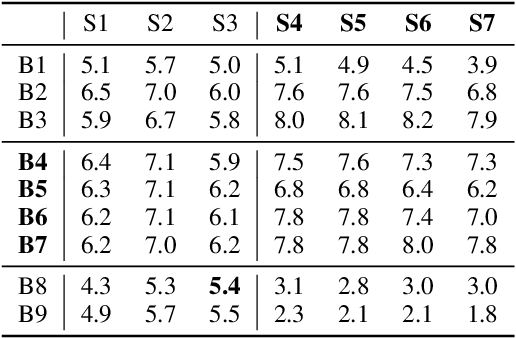
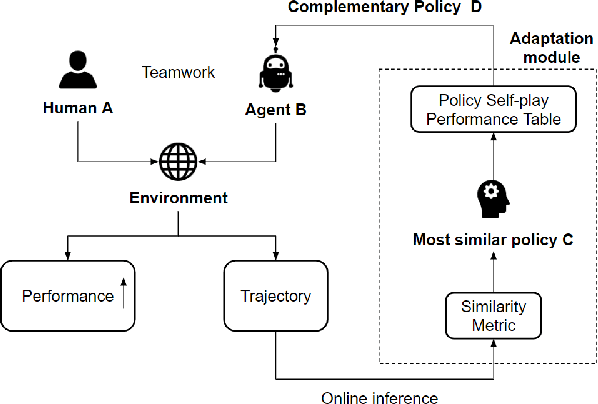
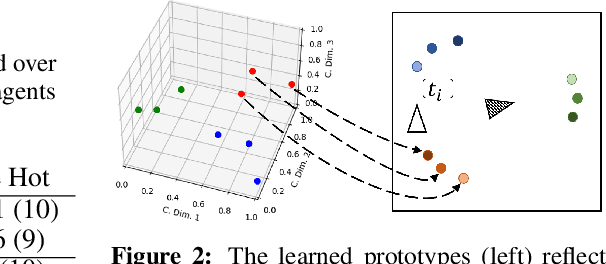
Teamwork is a set of interrelated reasoning, actions and behaviors of team members that facilitate common objectives. Teamwork theory and experiments have resulted in a set of states and processes for team effectiveness in both human-human and agent-agent teams. However, human-agent teaming is less well studied because it is so new and involves asymmetry in policy and intent not present in human teams. To optimize team performance in human-agent teaming, it is critical that agents infer human intent and adapt their polices for smooth coordination. Most literature in human-agent teaming builds agents referencing a learned human model. Though these agents are guaranteed to perform well with the learned model, they lay heavy assumptions on human policy such as optimality and consistency, which is unlikely in many real-world scenarios. In this paper, we propose a novel adaptive agent architecture in human-model-free setting on a two-player cooperative game, namely Team Space Fortress (TSF). Previous human-human team research have shown complementary policies in TSF game and diversity in human players' skill, which encourages us to relax the assumptions on human policy. Therefore, we discard learning human models from human data, and instead use an adaptation strategy on a pre-trained library of exemplar policies composed of RL algorithms or rule-based methods with minimal assumptions of human behavior. The adaptation strategy relies on a novel similarity metric to infer human policy and then selects the most complementary policy in our library to maximize the team performance. The adaptive agent architecture can be deployed in real-time and generalize to any off-the-shelf static agents. We conducted human-agent experiments to evaluate the proposed adaptive agent framework, and demonstrated the suboptimality, diversity, and adaptability of human policies in human-agent teams.
Predicting Human Strategies in Simulated Search and Rescue Task
Nov 19, 2020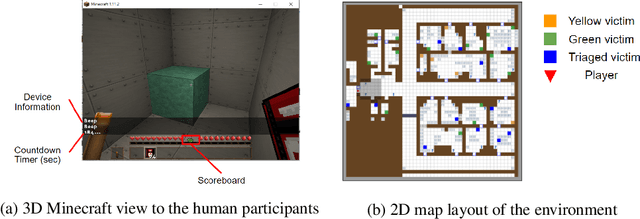
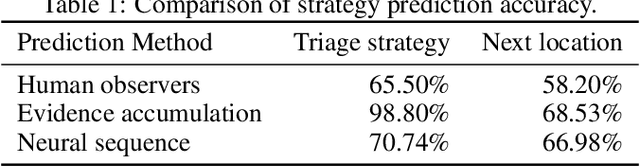
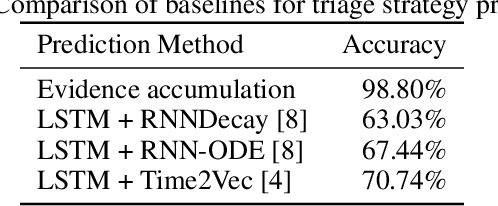
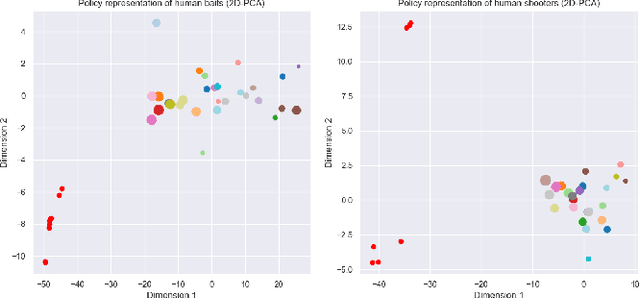
In a search and rescue scenario, rescuers may have different knowledge of the environment and strategies for exploration. Understanding what is inside a rescuer's mind will enable an observer agent to proactively assist them with critical information that can help them perform their task efficiently. To this end, we propose to build models of the rescuers based on their trajectory observations to predict their strategies. In our efforts to model the rescuer's mind, we begin with a simple simulated search and rescue task in Minecraft with human participants. We formulate neural sequence models to predict the triage strategy and the next location of the rescuer. As the neural networks are data-driven, we design a diverse set of artificial "faux human" agents for training, to test them with limited human rescuer trajectory data. To evaluate the agents, we compare it to an evidence accumulation method that explicitly incorporates all available background knowledge and provides an intended upper bound for the expected performance. Further, we perform experiments where the observer/predictor is human. We show results in terms of prediction accuracy of our computational approaches as compared with that of human observers.
Explanation of Reinforcement Learning Model in Dynamic Multi-Agent System
Aug 04, 2020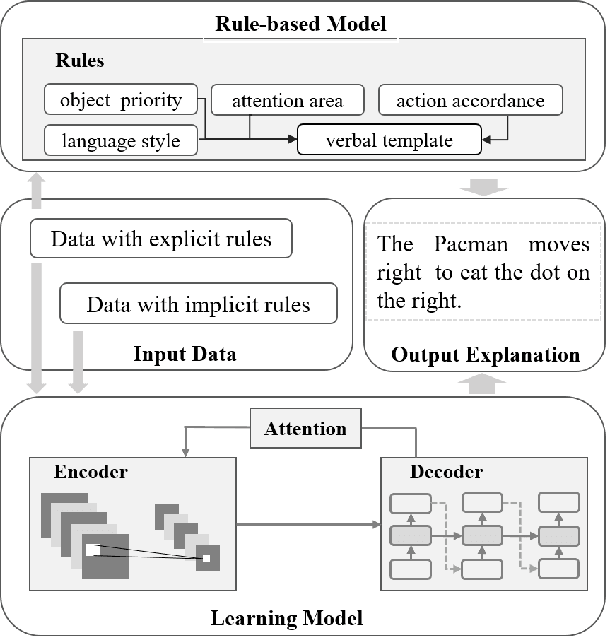
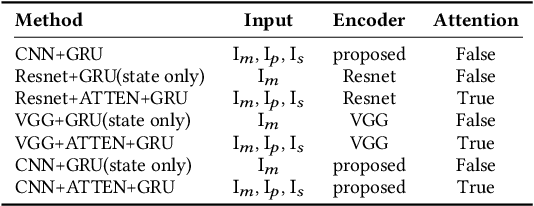
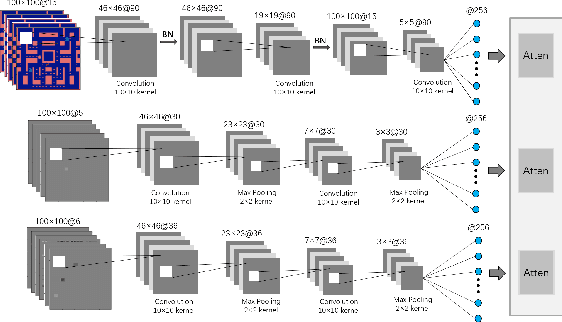
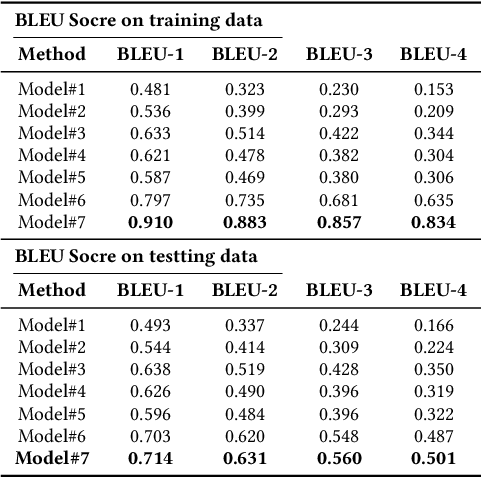
Recently, there has been increasing interest in transparency and interpretability in Deep Reinforcement Learning (DRL) systems. Verbal explanations, as the most natural way of communication in our daily life, deserve more attention, since they allow users to gain a better understanding of the system which ultimately could lead to a high level of trust and smooth collaboration. This paper reports a novel work in generating verbal explanations for DRL behaviors agent. A rule-based model is designed to construct explanations using a series of rules which are predefined with prior knowledge. A learning model is then proposed to expand the implicit logic of generating verbal explanation to general situations by employing rule-based explanations as training data. The learning model is shown to have better flexibility and generalizability than the static rule-based model. The performance of both models is evaluated quantitatively through objective metrics. The results show that verbal explanation generated by both models improve subjective satisfaction of users towards the interpretability of DRL systems. Additionally, seven variants of the learning model are designed to illustrate the contribution of input channels, attention mechanism, and proposed encoder in improving the quality of verbal explanation.
Transparency and Explanation in Deep Reinforcement Learning Neural Networks
Sep 17, 2018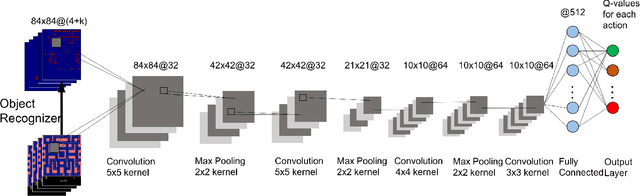
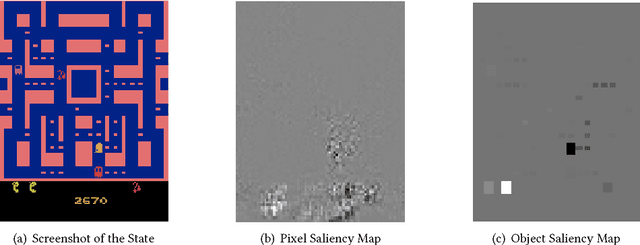

Autonomous AI systems will be entering human society in the near future to provide services and work alongside humans. For those systems to be accepted and trusted, the users should be able to understand the reasoning process of the system, i.e. the system should be transparent. System transparency enables humans to form coherent explanations of the system's decisions and actions. Transparency is important not only for user trust, but also for software debugging and certification. In recent years, Deep Neural Networks have made great advances in multiple application areas. However, deep neural networks are opaque. In this paper, we report on work in transparency in Deep Reinforcement Learning Networks (DRLN). Such networks have been extremely successful in accurately learning action control in image input domains, such as Atari games. In this paper, we propose a novel and general method that (a) incorporates explicit object recognition processing into deep reinforcement learning models, (b) forms the basis for the development of "object saliency maps", to provide visualization of internal states of DRLNs, thus enabling the formation of explanations and (c) can be incorporated in any existing deep reinforcement learning framework. We present computational results and human experiments to evaluate our approach.