 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredicting Human Strategies in Simulated Search and Rescue Task
Paper and Code
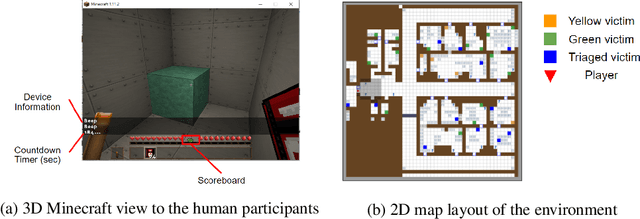
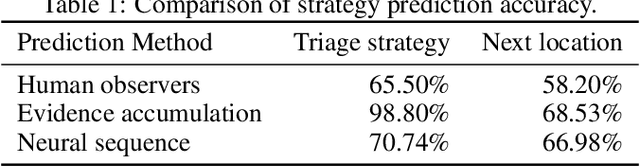
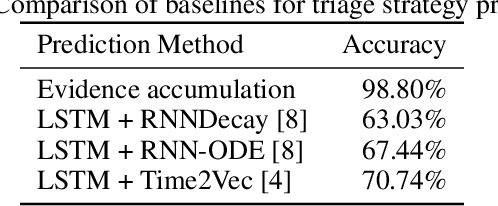
In a search and rescue scenario, rescuers may have different knowledge of the environment and strategies for exploration. Understanding what is inside a rescuer's mind will enable an observer agent to proactively assist them with critical information that can help them perform their task efficiently. To this end, we propose to build models of the rescuers based on their trajectory observations to predict their strategies. In our efforts to model the rescuer's mind, we begin with a simple simulated search and rescue task in Minecraft with human participants. We formulate neural sequence models to predict the triage strategy and the next location of the rescuer. As the neural networks are data-driven, we design a diverse set of artificial "faux human" agents for training, to test them with limited human rescuer trajectory data. To evaluate the agents, we compare it to an evidence accumulation method that explicitly incorporates all available background knowledge and provides an intended upper bound for the expected performance. Further, we perform experiments where the observer/predictor is human. We show results in terms of prediction accuracy of our computational approaches as compared with that of human observers.