 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal Task Assignment and Path Planning using Conflict-Based Search with Precedence and Temporal Constraints
Feb 13, 2024



The Multi-Agent Path Finding (MAPF) problem entails finding collision-free paths for a set of agents, guiding them from their start to goal locations. However, MAPF does not account for several practical task-related constraints. For example, agents may need to perform actions at goal locations with specific execution times, adhering to predetermined orders and timeframes. Moreover, goal assignments may not be predefined for agents, and the optimization objective may lack an explicit definition. To incorporate task assignment, path planning, and a user-defined objective into a coherent framework, this paper examines the Task Assignment and Path Finding with Precedence and Temporal Constraints (TAPF-PTC) problem. We augment Conflict-Based Search (CBS) to simultaneously generate task assignments and collision-free paths that adhere to precedence and temporal constraints, maximizing an objective quantified by the return from a user-defined reward function in reinforcement learning (RL). Experimentally, we demonstrate that our algorithm, CBS-TA-PTC, can solve highly challenging bomb-defusing tasks with precedence and temporal constraints efficiently relative to MARL and adapted Target Assignment and Path Finding (TAPF) methods.
Toward General-Purpose Robots via Foundation Models: A Survey and Meta-Analysis
Dec 15, 2023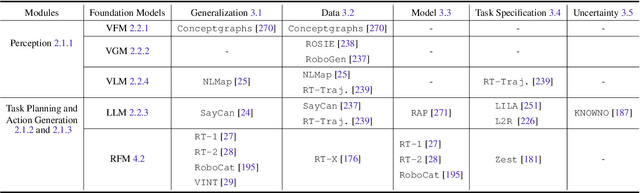

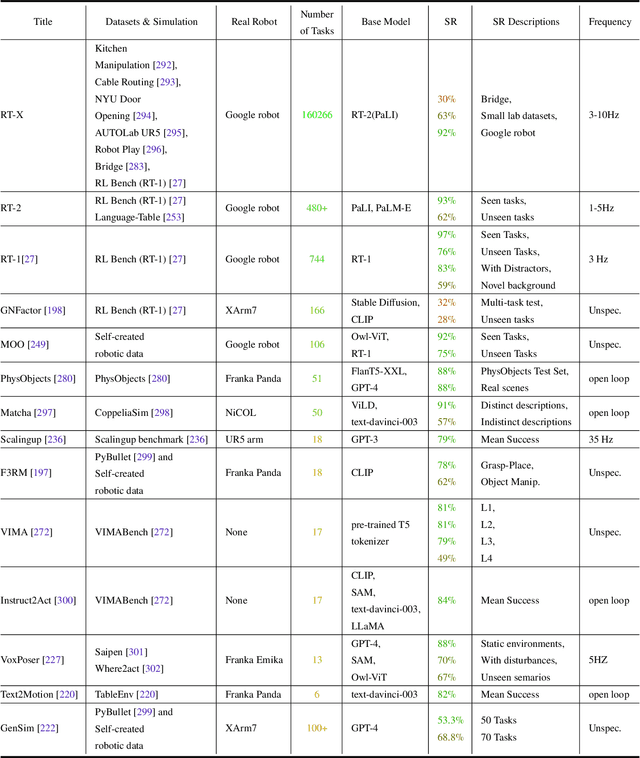
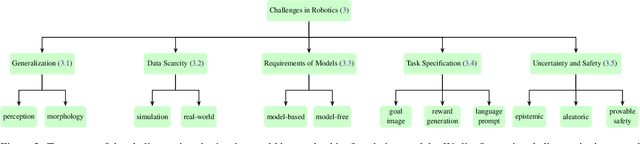
Building general-purpose robots that can operate seamlessly, in any environment, with any object, and utilizing various skills to complete diverse tasks has been a long-standing goal in Artificial Intelligence. Unfortunately, however, most existing robotic systems have been constrained - having been designed for specific tasks, trained on specific datasets, and deployed within specific environments. These systems usually require extensively-labeled data, rely on task-specific models, have numerous generalization issues when deployed in real-world scenarios, and struggle to remain robust to distribution shifts. Motivated by the impressive open-set performance and content generation capabilities of web-scale, large-capacity pre-trained models (i.e., foundation models) in research fields such as Natural Language Processing (NLP) and Computer Vision (CV), we devote this survey to exploring (i) how these existing foundation models from NLP and CV can be applied to the field of robotics, and also exploring (ii) what a robotics-specific foundation model would look like. We begin by providing an overview of what constitutes a conventional robotic system and the fundamental barriers to making it universally applicable. Next, we establish a taxonomy to discuss current work exploring ways to leverage existing foundation models for robotics and develop ones catered to robotics. Finally, we discuss key challenges and promising future directions in using foundation models for enabling general-purpose robotic systems. We encourage readers to view our living GitHub repository of resources, including papers reviewed in this survey as well as related projects and repositories for developing foundation models for robotics.
Theory of Mind for Multi-Agent Collaboration via Large Language Models
Oct 22, 2023



While Large Language Models (LLMs) have demonstrated impressive accomplishments in both reasoning and planning, their abilities in multi-agent collaborations remains largely unexplored. This study evaluates LLM-based agents in a multi-agent cooperative text game with Theory of Mind (ToM) inference tasks, comparing their performance with Multi-Agent Reinforcement Learning (MARL) and planning-based baselines. We observed evidence of emergent collaborative behaviors and high-order Theory of Mind capabilities among LLM-based agents. Our results reveal limitations in LLM-based agents' planning optimization due to systematic failures in managing long-horizon contexts and hallucination about the task state. We explore the use of explicit belief state representations to mitigate these issues, finding that it enhances task performance and the accuracy of ToM inferences for LLM-based agents.