 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBIOME-Bench: A Benchmark for Biomolecular Interaction Inference and Multi-Omics Pathway Mechanism Elucidation from Scientific Literature
Dec 31, 2025Multi-omics studies often rely on pathway enrichment to interpret heterogeneous molecular changes, but pathway enrichment (PE)-based workflows inherit structural limitations of pathway resources, including curation lag, functional redundancy, and limited sensitivity to molecular states and interventions. Although recent work has explored using large language models (LLMs) to improve PE-based interpretation, the lack of a standardized benchmark for end-to-end multi-omics pathway mechanism elucidation has largely confined evaluation to small, manually curated datasets or ad hoc case studies, hindering reproducible progress. To address this issue, we introduce BIOME-Bench, constructed via a rigorous four-stage workflow, to evaluate two core capabilities of LLMs in multi-omics analysis: Biomolecular Interaction Inference and end-to-end Multi-Omics Pathway Mechanism Elucidation. We develop evaluation protocols for both tasks and conduct comprehensive experiments across multiple strong contemporary models. Experimental results demonstrate that existing models still exhibit substantial deficiencies in multi-omics analysis, struggling to reliably distinguish fine-grained biomolecular relation types and to generate faithful, robust pathway-level mechanistic explanations.
ROMAS: A Role-Based Multi-Agent System for Database monitoring and Planning
Dec 18, 2024



In recent years, Large Language Models (LLMs) have demonstrated remarkable capabilities in data analytics when integrated with Multi-Agent Systems (MAS). However, these systems often struggle with complex tasks that involve diverse functional requirements and intricate data processing challenges, necessitating customized solutions that lack broad applicability. Furthermore, current MAS fail to emulate essential human-like traits such as self-planning, self-monitoring, and collaborative work in dynamic environments, leading to inefficiencies and resource wastage. To address these limitations, we propose ROMAS, a novel Role-Based M ulti-A gent System designed to adapt to various scenarios while enabling low code development and one-click deployment. ROMAS has been effectively deployed in DB-GPT [Xue et al., 2023a, 2024b], a well-known project utilizing LLM-powered database analytics, showcasing its practical utility in real-world scenarios. By integrating role-based collaborative mechanisms for self-monitoring and self-planning, and leveraging existing MAS capabilities to enhance database interactions, ROMAS offers a more effective and versatile solution. Experimental evaluations of ROMAS demonstrate its superiority across multiple scenarios, highlighting its potential to advance the field of multi-agent data analytics.
Demonstration of DB-GPT: Next Generation Data Interaction System Empowered by Large Language Models
Apr 18, 2024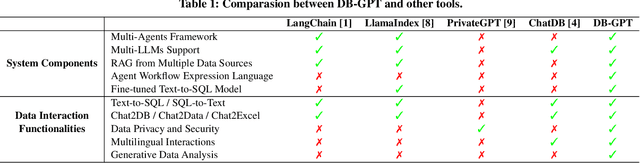
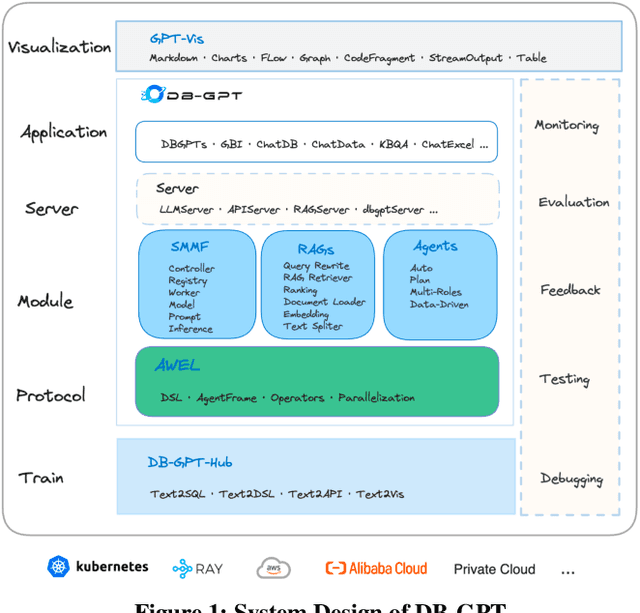

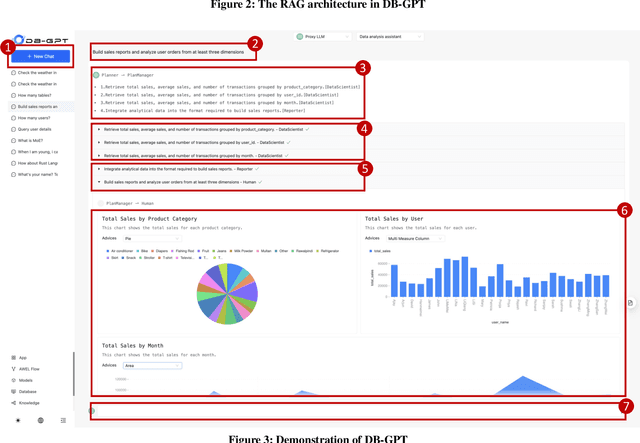
The recent breakthroughs in large language models (LLMs) are positioned to transition many areas of software. The technologies of interacting with data particularly have an important entanglement with LLMs as efficient and intuitive data interactions are paramount. In this paper, we present DB-GPT, a revolutionary and product-ready Python library that integrates LLMs into traditional data interaction tasks to enhance user experience and accessibility. DB-GPT is designed to understand data interaction tasks described by natural language and provide context-aware responses powered by LLMs, making it an indispensable tool for users ranging from novice to expert. Its system design supports deployment across local, distributed, and cloud environments. Beyond handling basic data interaction tasks like Text-to-SQL with LLMs, it can handle complex tasks like generative data analysis through a Multi-Agents framework and the Agentic Workflow Expression Language (AWEL). The Service-oriented Multi-model Management Framework (SMMF) ensures data privacy and security, enabling users to employ DB-GPT with private LLMs. Additionally, DB-GPT offers a series of product-ready features designed to enable users to integrate DB-GPT within their product environments easily. The code of DB-GPT is available at Github(https://github.com/eosphoros-ai/DB-GPT) which already has over 10.7k stars. Please install DB-GPT for your own usage with the instructions(https://github.com/eosphoros-ai/DB-GPT#install) and watch a 5-minute introduction video on Youtube(https://youtu.be/n_8RI1ENyl4) to further investigate DB-GPT.
Group Feature Learning and Domain Adversarial Neural Network for aMCI Diagnosis System Based on EEG
Apr 28, 2021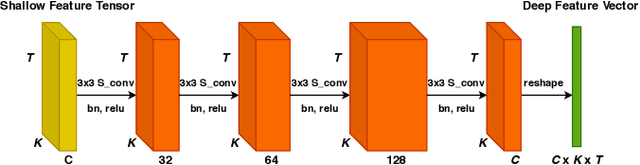
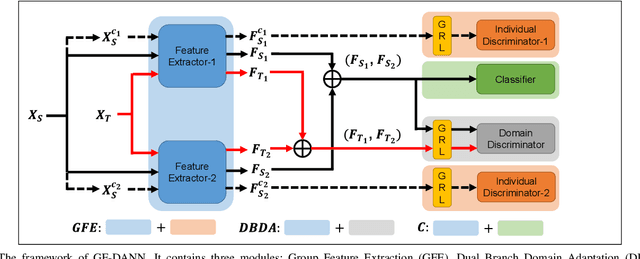
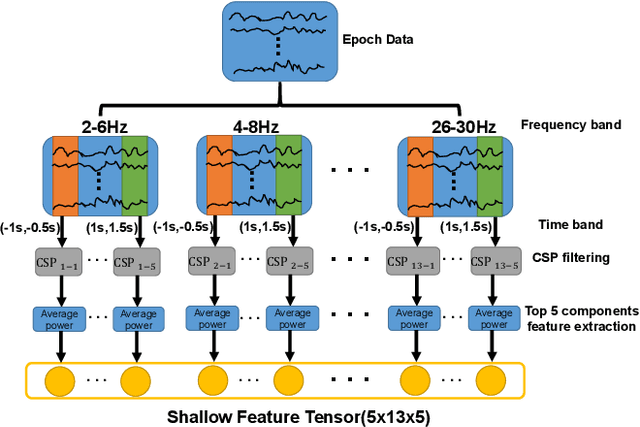
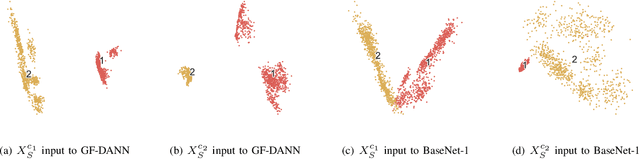
Medical diagnostic robot systems have been paid more and more attention due to its objectivity and accuracy. The diagnosis of mild cognitive impairment (MCI) is considered an effective means to prevent Alzheimer's disease (AD). Doctors diagnose MCI based on various clinical examinations, which are expensive and the diagnosis results rely on the knowledge of doctors. Therefore, it is necessary to develop a robot diagnostic system to eliminate the influence of human factors and obtain a higher accuracy rate. In this paper, we propose a novel Group Feature Domain Adversarial Neural Network (GF-DANN) for amnestic MCI (aMCI) diagnosis, which involves two important modules. A Group Feature Extraction (GFE) module is proposed to reduce individual differences by learning group-level features through adversarial learning. A Dual Branch Domain Adaptation (DBDA) module is carefully designed to reduce the distribution difference between the source and target domain in a domain adaption way. On three types of data set, GF-DANN achieves the best accuracy compared with classic machine learning and deep learning methods. On the DMS data set, GF-DANN has obtained an accuracy rate of 89.47%, and the sensitivity and specificity are 90% and 89%. In addition, by comparing three EEG data collection paradigms, our results demonstrate that the DMS paradigm has the potential to build an aMCI diagnose robot system.
Optimal Algorithms for Stochastic Multi-Armed Bandits with Heavy Tailed Rewards
Oct 24, 2020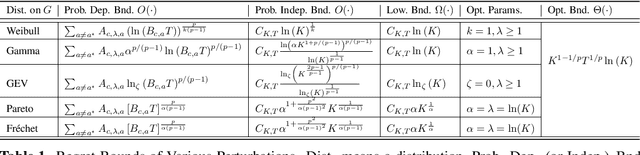
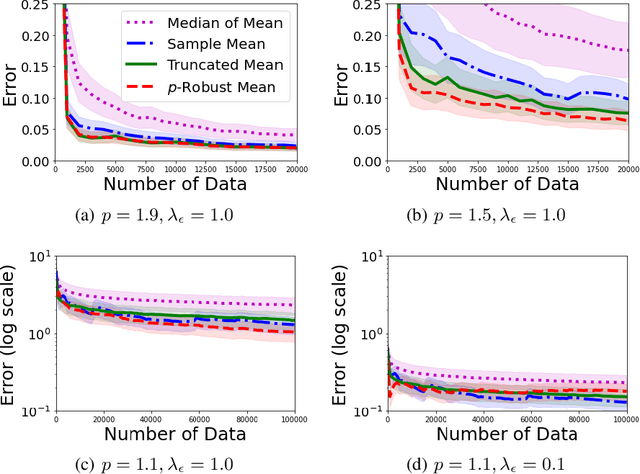
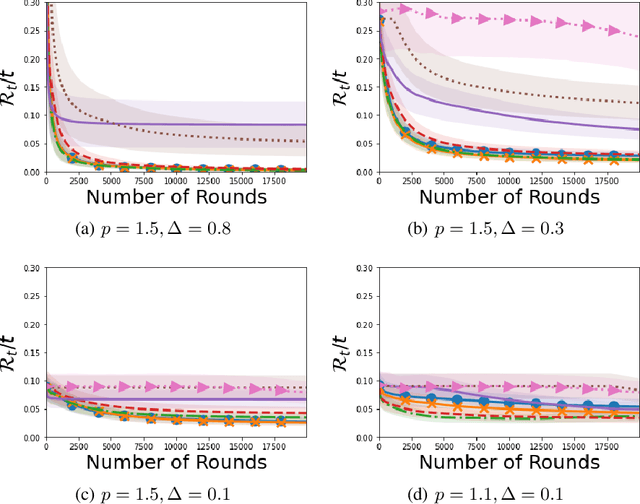
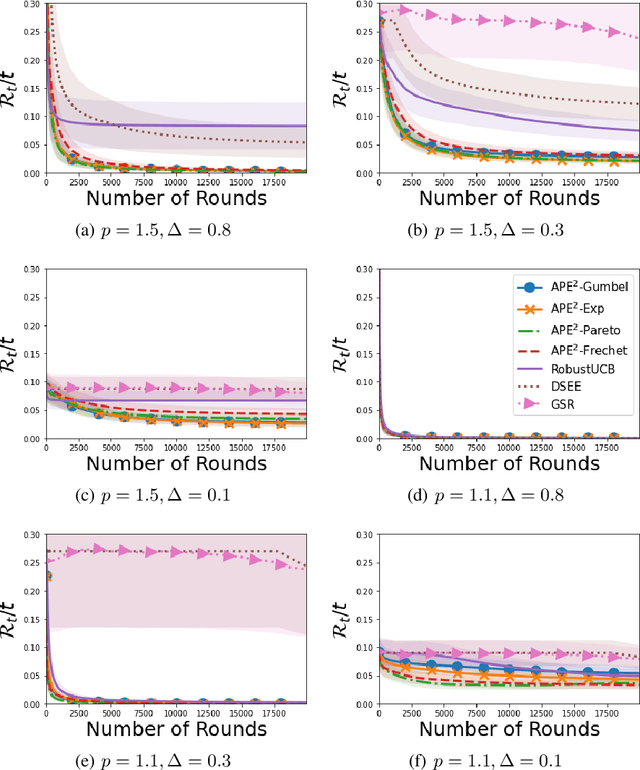
In this paper, we consider stochastic multi-armed bandits (MABs) with heavy-tailed rewards, whose $p$-th moment is bounded by a constant $\nu_{p}$ for $1<p\leq2$. First, we propose a novel robust estimator which does not require $\nu_{p}$ as prior information, while other existing robust estimators demand prior knowledge about $\nu_{p}$. We show that an error probability of the proposed estimator decays exponentially fast. Using this estimator, we propose a perturbation-based exploration strategy and develop a generalized regret analysis scheme that provides upper and lower regret bounds by revealing the relationship between the regret and the cumulative density function of the perturbation. From the proposed analysis scheme, we obtain gap-dependent and gap-independent upper and lower regret bounds of various perturbations. We also find the optimal hyperparameters for each perturbation, which can achieve the minimax optimal regret bound with respect to total rounds. In simulation, the proposed estimator shows favorable performance compared to existing robust estimators for various $p$ values and, for MAB problems, the proposed perturbation strategy outperforms existing exploration methods.