 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGroup Feature Learning and Domain Adversarial Neural Network for aMCI Diagnosis System Based on EEG
Apr 28, 2021
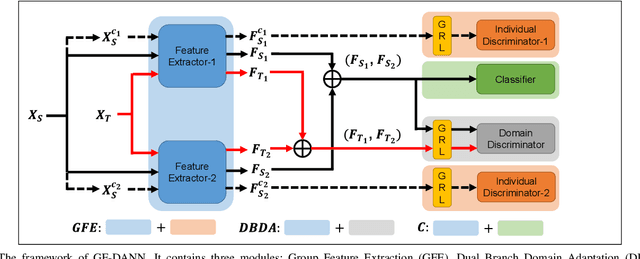
Medical diagnostic robot systems have been paid more and more attention due to its objectivity and accuracy. The diagnosis of mild cognitive impairment (MCI) is considered an effective means to prevent Alzheimer's disease (AD). Doctors diagnose MCI based on various clinical examinations, which are expensive and the diagnosis results rely on the knowledge of doctors. Therefore, it is necessary to develop a robot diagnostic system to eliminate the influence of human factors and obtain a higher accuracy rate. In this paper, we propose a novel Group Feature Domain Adversarial Neural Network (GF-DANN) for amnestic MCI (aMCI) diagnosis, which involves two important modules. A Group Feature Extraction (GFE) module is proposed to reduce individual differences by learning group-level features through adversarial learning. A Dual Branch Domain Adaptation (DBDA) module is carefully designed to reduce the distribution difference between the source and target domain in a domain adaption way. On three types of data set, GF-DANN achieves the best accuracy compared with classic machine learning and deep learning methods. On the DMS data set, GF-DANN has obtained an accuracy rate of 89.47%, and the sensitivity and specificity are 90% and 89%. In addition, by comparing three EEG data collection paradigms, our results demonstrate that the DMS paradigm has the potential to build an aMCI diagnose robot system.
Intention Recognition of Pedestrians and Cyclists by 2D Pose Estimation
Oct 09, 2019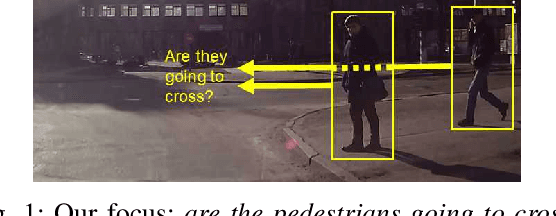



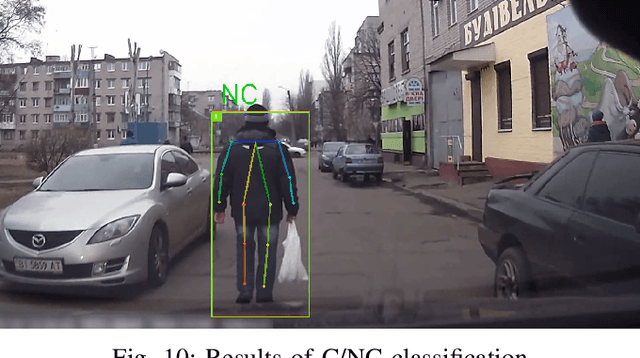
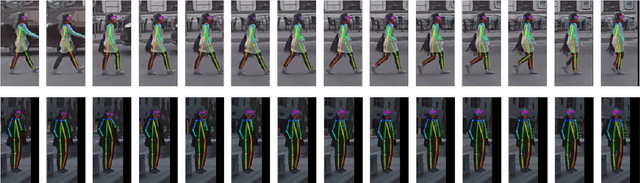
Anticipating the intentions of vulnerable road users (VRUs) such as pedestrians and cyclists is critical for performing safe and comfortable driving maneuvers. This is the case for human driving and, thus, should be taken into account by systems providing any level of driving assistance, from advanced driver assistant systems (ADAS) to fully autonomous vehicles (AVs). In this paper, we show how the latest advances on monocular vision-based human pose estimation, i.e. those relying on deep Convolutional Neural Networks (CNNs), enable to recognize the intentions of such VRUs. In the case of cyclists, we assume that they follow traffic rules to indicate future maneuvers with arm signals. In the case of pedestrians, no indications can be assumed. Instead, we hypothesize that the walking pattern of a pedestrian allows to determine if he/she has the intention of crossing the road in the path of the ego-vehicle, so that the ego-vehicle must maneuver accordingly (e.g. slowing down or stopping). In this paper, we show how the same methodology can be used for recognizing pedestrians and cyclists' intentions. For pedestrians, we perform experiments on the JAAD dataset. For cyclists, we did not found an analogous dataset, thus, we created our own one by acquiring and annotating videos which we share with the research community. Overall, the proposed pipeline provides new state-of-the-art results on the intention recognition of VRUs.
Is the Pedestrian going to Cross? Answering by 2D Pose Estimation
Jul 15, 2018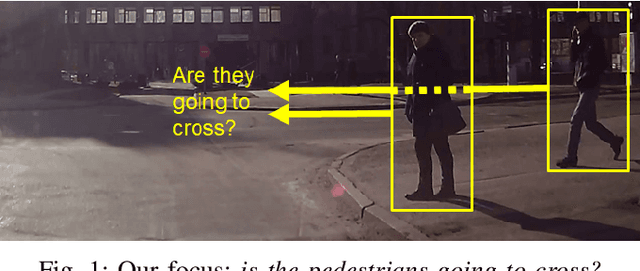
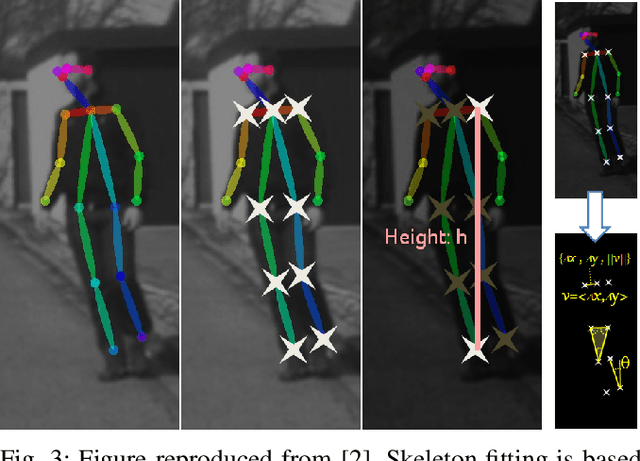
Our recent work suggests that, thanks to nowadays powerful CNNs, image-based 2D pose estimation is a promising cue for determining pedestrian intentions such as crossing the road in the path of the ego-vehicle, stopping before entering the road, and starting to walk or bending towards the road. This statement is based on the results obtained on non-naturalistic sequences (Daimler dataset), i.e. in sequences choreographed specifically for performing the study. Fortunately, a new publicly available dataset (JAAD) has appeared recently to allow developing methods for detecting pedestrian intentions in naturalistic driving conditions; more specifically, for addressing the relevant question is the pedestrian going to cross? Accordingly, in this paper we use JAAD to assess the usefulness of 2D pose estimation for answering such a question. We combine CNN-based pedestrian detection, tracking and pose estimation to predict the crossing action from monocular images. Overall, the proposed pipeline provides new state-of-the-art results.