 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCyborg Insect Factory: Automatic Assembly System to Build up Insect-computer Hybrid Robot Based on Vision-guided Robotic Arm Manipulation of Custom Bipolar Electrodes
Nov 20, 2024The advancement of insect-computer hybrid robots holds significant promise for navigating complex terrains and enhancing robotics applications. This study introduced an automatic assembly method for insect-computer hybrid robots, which was accomplished by mounting backpack with precise implantation of custom-designed bipolar electrodes. We developed a stimulation protocol for the intersegmental membrane between pronotum and mesothorax of the Madagascar hissing cockroach, allowing for bipolar electrodes' automatic implantation using a robotic arm. The assembly process was integrated with a deep learning-based vision system to accurately identify the implantation site, and a dedicated structure to fix the insect (68 s for the whole assembly process). The automatically assembled hybrid robots demonstrated steering control (over 70 degrees for 0.4 s stimulation) and deceleration control (68.2% speed reduction for 0.4 s stimulation), matching the performance of manually assembled systems. Furthermore, a multi-agent system consisting of 4 hybrid robots successfully covered obstructed outdoor terrain (80.25% for 10 minutes 31 seconds), highlighting the feasibility of mass-producing these systems for practical applications. The proposed automatic assembly strategy reduced preparation time for the insect-computer hybrid robots while maintaining their precise control, laying a foundation for scalable production and deployment in real-world applications.
Streamlined shape of cyborg cockroach promotes traversability in confined environments by gap negotiation
Oct 10, 2024The centimeter-scale cyborg insects have a potential advantage for application in narrow environments where humans cannot operate. To realize such tasks, researchers have developed a small printed-circuit-board (PCB) which an insect can carry and control it. The electronic components usually remain bare on the board and the whole board is mounted on platform animals, resulting in uneven morphology of whole cyborg with sharp edges. It is well known that streamlined body shape in artificial vehicles or robots contributes to effective locomotion by reducing drag force in media. However, little is known how the entire body shape impacts on locomotor performance of cyborg insect. Here, we developed a 10 mm by 10 mm board which provided electrical stimulation via Sub-GHz communication and investigated the impact of physical arrangement of the board using Madagascar hissing cockroach. We compared the success rate of gap negotiation between the cyborg with mounted board and implanted board and found the latter outperformed the former. We demonstrated our cyborg cockroach with implanted board could follow faithfully to the locomotion command via antennal or cercal stimulation and traverse a narrow gap like air vent cover. In contrast to the conventional arrangement, our cyborg insects are suitable for application in a concealed environment.
Gait-Adaptive Navigation and Human Searching in field with Cyborg Insect
Jun 06, 2024



This study focuses on improving the ability of cyborg insects to navigate autonomously during search and rescue missions in outdoor environments. We propose an algorithm that leverages data from an IMU to calculate orientation and position based on the insect's walking gait. These computed factors serve as essential feedback channels across 3 phases of our exploration. Our method functions without relying on external systems. The results of our trials, carried out in both indoor (4.8 x 6.6 m^2) and outdoor (3.5 x 6.0 m^2) settings, show that the cyborg insect is capable of seeking a human without knowing the human's position. This exploration strategy would help to bring terrestrial cyborg insects closer to practical application in real-life search and rescue (SAR) missions.
Natural-artificial hybrid swarm: Cyborg-insect group navigation in unknown obstructed soft terrain
Mar 27, 2024Navigating multi-robot systems in complex terrains has always been a challenging task. This is due to the inherent limitations of traditional robots in collision avoidance, adaptation to unknown environments, and sustained energy efficiency. In order to overcome these limitations, this research proposes a solution by integrating living insects with miniature electronic controllers to enable robotic-like programmable control, and proposing a novel control algorithm for swarming. Although these creatures, called cyborg insects, have the ability to instinctively avoid collisions with neighbors and obstacles while adapting to complex terrains, there is a lack of literature on the control of multi-cyborg systems. This research gap is due to the difficulty in coordinating the movements of a cyborg system under the presence of insects' inherent individual variability in their reactions to control input. In response to this issue, we propose a novel swarm navigation algorithm addressing these challenges. The effectiveness of the algorithm is demonstrated through an experimental validation in which a cyborg swarm was successfully navigated through an unknown sandy field with obstacles and hills. This research contributes to the domain of swarm robotics and showcases the potential of integrating biological organisms with robotics and control theory to create more intelligent autonomous systems with real-world applications.
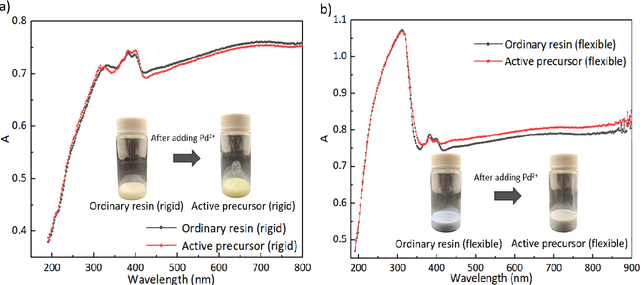
3D Programming of Patterned Heterogeneous Interface for 4D Smart Robotics
Dec 22, 2023Shape memory structures are playing an important role in many cutting-edge intelligent fields. However, the existing technologies can only realize 4D printing of a single polymer or metal, which limits practical applications. Here, we report a construction strategy for TSMP/M heterointerface, which uses Pd2+-containing shape memory polymer (AP-SMR) to induce electroless plating reaction and relies on molecular dynamics, which has both shape memory properties and metal activity and information processing power. Through multi-material DLP 3D printing technology, the interface can be 3D selectively programmed on functional substrate parts of arbitrary shapes to become 4D electronic smart devices (Robotics). Microscopically, this type of interface appears as a composite structure with a nanometer-micrometer interface height, which is composed of a pure substrate layer (smart materials), an intermediate layer (a composite structure in which metal particles are embedded in a polymer cross-linked network) and a pure metal layer. The structure programmed by TSMP/M heterointerface exhibits both SMA characteristics and metal properties, thus having more intelligent functions (electroactive, electrothermal deformation, electronically controlled denaturation) and higher performance (selectivity of shape memory structures can be realized control, remote control, inline control and low voltage control). This is expected to provide a more flexible manufacturing process as platform technology for designing, manufacturing and applying smart devices with new concepts, and promote the development of cutting-edge industries such as smart robots and smart electronics.
Resilient conductive membrane synthesized by in-situ polymerisation for wearable non-invasive electronics on moving appendages of cyborg insect
Mar 20, 2023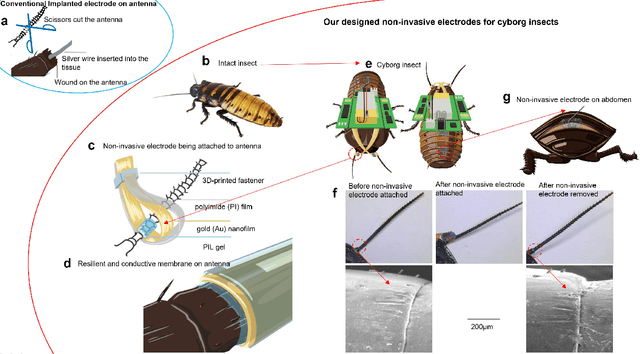
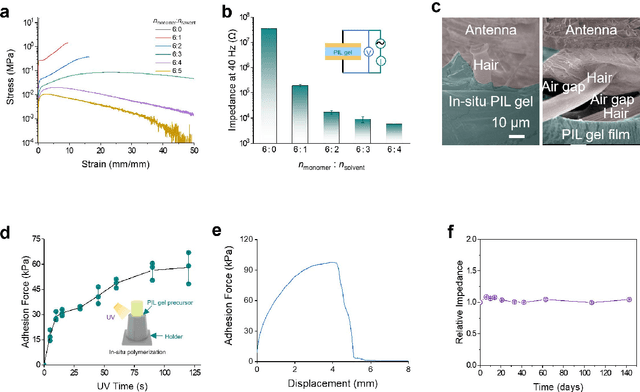

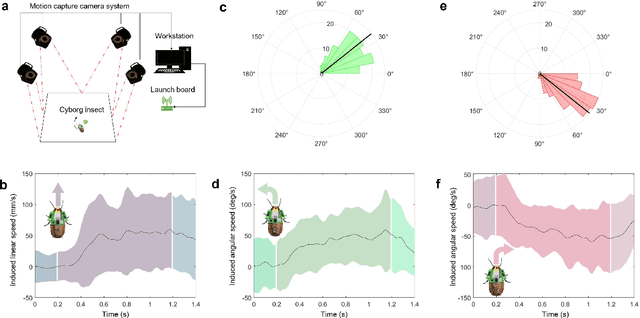
By leveraging their high mobility and small size, insects have been combined with microcontrollers to build up cyborg insects for various practical applications. Unfortunately, all current cyborg insects rely on implanted electrodes to control their movement, which causes irreversible damage to their organs and muscles. Here, we develop a non-invasive method for cyborg insects to address above issues, using a conformal electrode with an in-situ polymerized ion-conducting layer and an electron-conducting layer. The neural and locomotion responses to the electrical inductions verify the efficient communication between insects and controllers by the non-invasive method. The precise "S" line following of the cyborg insect further demonstrates its potential in practical navigation. The conformal non-invasive electrodes keep the intactness of the insects used while controlling their motion. With the antennae, important olfactory organs of insects preserved, the cyborg insect, in the future, may be endowed with abilities to detect the surrounding environment.
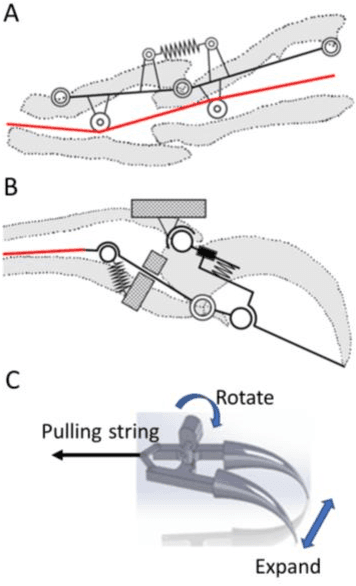
Toward the smooth mesh climbing of a miniature robot using bioinspired soft and expandable claws
Jun 15, 2022



While most micro-robots face difficulty traveling on rugged and uneven terrain, beetles can walk smoothly on the complex substrate without slipping or getting stuck on the surface due to their stiffness-variable tarsi and expandable hooks on the tip of tarsi. In this study, we found that beetles actively bent and expanded their claws regularly to crawl freely on mesh surfaces. Inspired by the crawling mechanism of the beetles, we designed an 8-cm miniature climbing robot equipping artificial claws to open and bend in the same cyclic manner as natural beetles. The robot can climb freely with a controllable gait on the mesh surface, steep incline of the angle of 60{\deg}, and even transition surface. To our best knowledge, this is the first micro-scale robot that can climb both the mesh surface and cliffy incline.
Cyborg Beetle Achieves Efficient Autonomous Navigation Using Feedback Control
May 05, 2022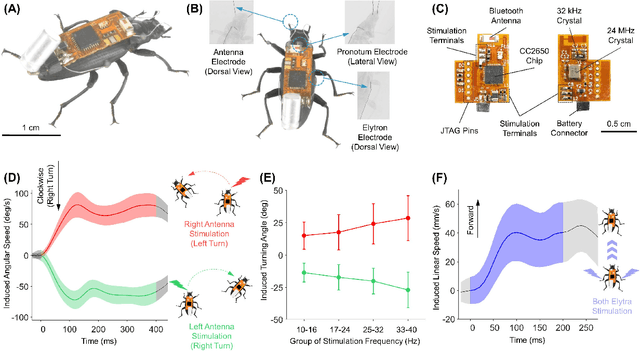
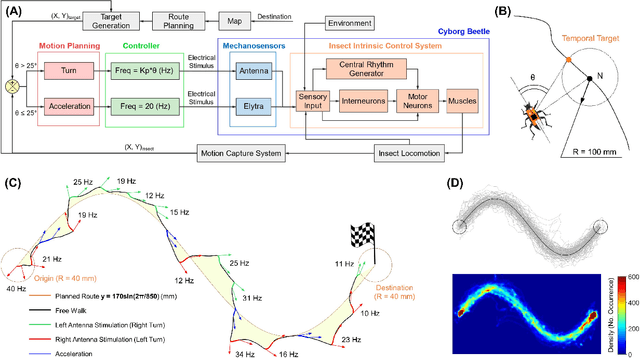
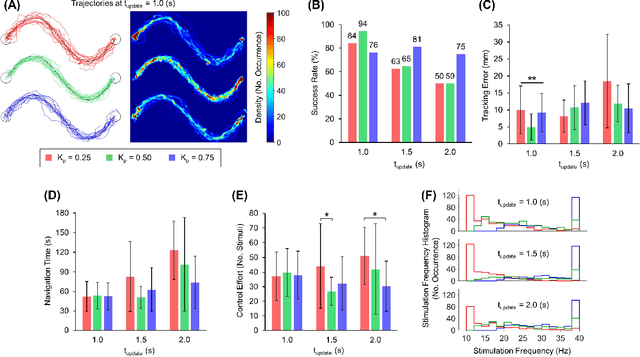
Terrestrial cyborg insects were long discussed as potential complements for insect-scale mobile robots. These cyborgs inherit the insects' outstanding locomotory skills, orchestrated by a sophisticated central nervous system and various sensory organs, favoring their maneuvers in complex terrains. However, the autonomous navigation of these cyborgs was not yet comprehensively studied. The struggle to select optimal stimuli for individual insects hinders reliable and accurate navigations. This study overcomes this problem and provides a detailed look at the terrestrial navigation of cyborg insects (darkling beetle) by implementing a feedback control system. Via a thrust controller for acceleration and a proportional controller for turning, the system regulates the stimulation parameters depending on the beetle's instantaneous status. Adjusting the system's control parameters allows reliable and precise path-following navigations (i.e., up to ~94% success rate, ~1/2 body length accuracy). Also, the system's performance can be tuned, providing flexibility to navigation applications of terrestrial cyborg insects.
A robotics leg inspired from an insect leg
Mar 21, 2022
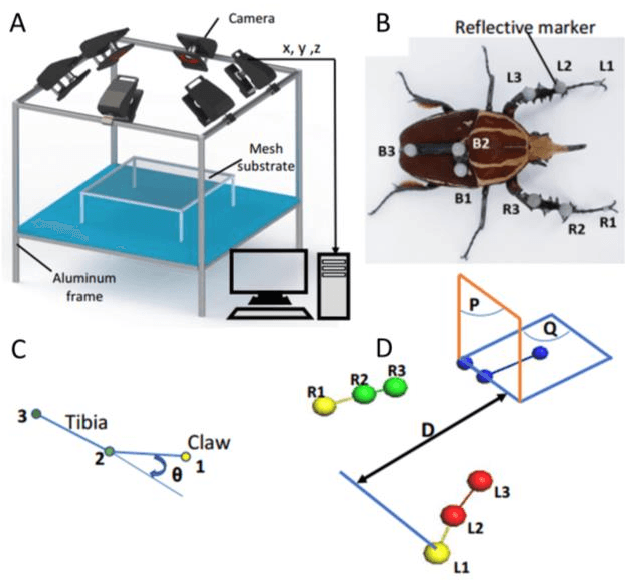
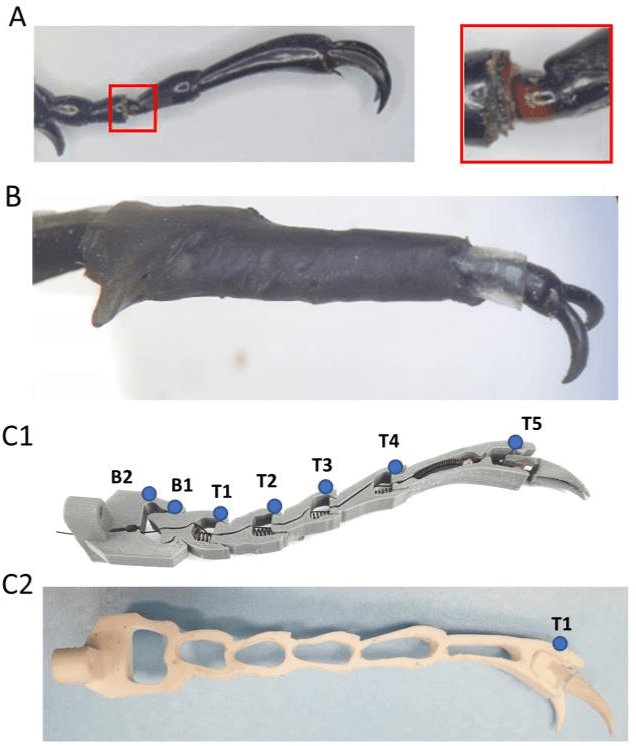
Legged robots can operate in complex terrains that are unreachable for most wheeled robots. While insect legs contact the ground with the tarsal segments and pretarsus, most insect-inspired robots come with a simple tarsus such as a hemispherical foot tip. Insects, like the M. Torquata beetle, use the claws as their attachment devices on rough surfaces. Their sharp claws can smoothly attach and detach on plant surfaces by actuating one muscle. Thus, legged robots can mimic tarsal structures to improve their locomotion on inclined and rough surfaces. We conducted two types of experiments to test the hypothesis that the tarsal flexibility and rigidity play a role in the beetle's smooth walking. By cutting the membrane between the tarsomeres, we disabled the tarsus' rigid ability, so the claws cannot securely hook onto the walking surface. Conversely, after eliminating the tarsal flexibility, the beetle struggled to draw the claws out of the substrate. The results confirm the significance of the tarsus' properties on beetle walking. Then, we designed a cable-driven 3D printed tarsus structure to validate the function of the tarsus via a robotic leg. The tarsal configuration allows the prototype to hook onto and detach smoothly from the walking surface.
New metal-plastic hybrid additive manufacturing strategy: Fabrication of arbitrary metal-patterns on external and even internal surfaces of 3D plastic structures
Dec 22, 2021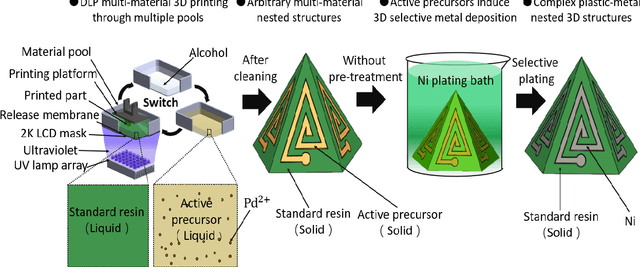
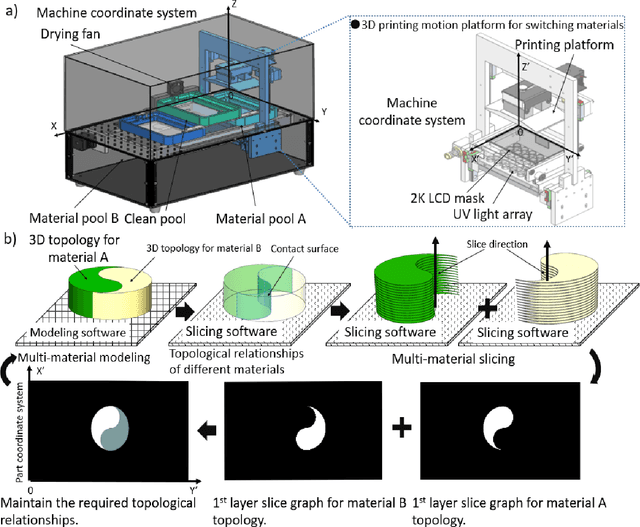
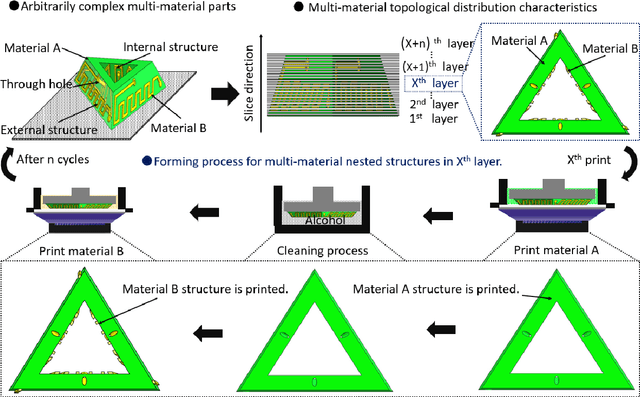
Constructing precise micro-nano metal patterns on complex three-dimensional (3D) plastic parts allows the fabrication of functional devices for advanced applications. However, this patterning is currently expensive and requires complex processes with long manufacturing lead time. The present work demonstrates a process for the fabrication of micro-nano 3D metal-plastic composite structures with arbitrarily complex shapes. In this approach, a light-cured resin is modified to prepare an active precursor capable of allowing subsequent electroless plating (ELP). A multi-material digital light processing 3D printer was newly developed to enable the fabrication of parts containing regions made of either standard resin or active precursor resin nested within each other. Selective 3D ELP processing of such parts provided various metal-plastic composite parts having complicated hollow micro-nano structures with specific topological relationships on a size scale as small as 40 um. Using this technique, 3D metal topologies that cannot be manufactured by traditional methods are possible, and metal patterns can be produced inside plastic parts as a means of further miniaturizing electronic devices. The proposed method can also generate metal coatings exhibiting improved adhesion of metal to plastic substrate. Based on this technique, several sensors composed of different functional nonmetallic materials and specific metal patterns were designed and fabricated. The present results demonstrate the viability of the proposed method and suggest potential applications in the fields of smart 3D micro-nano electronics, 3D wearable devices, micro/nano-sensors, and health care.