 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStreamlined shape of cyborg cockroach promotes traversability in confined environments by gap negotiation
Oct 10, 2024The centimeter-scale cyborg insects have a potential advantage for application in narrow environments where humans cannot operate. To realize such tasks, researchers have developed a small printed-circuit-board (PCB) which an insect can carry and control it. The electronic components usually remain bare on the board and the whole board is mounted on platform animals, resulting in uneven morphology of whole cyborg with sharp edges. It is well known that streamlined body shape in artificial vehicles or robots contributes to effective locomotion by reducing drag force in media. However, little is known how the entire body shape impacts on locomotor performance of cyborg insect. Here, we developed a 10 mm by 10 mm board which provided electrical stimulation via Sub-GHz communication and investigated the impact of physical arrangement of the board using Madagascar hissing cockroach. We compared the success rate of gap negotiation between the cyborg with mounted board and implanted board and found the latter outperformed the former. We demonstrated our cyborg cockroach with implanted board could follow faithfully to the locomotion command via antennal or cercal stimulation and traverse a narrow gap like air vent cover. In contrast to the conventional arrangement, our cyborg insects are suitable for application in a concealed environment.
Natural-artificial hybrid swarm: Cyborg-insect group navigation in unknown obstructed soft terrain
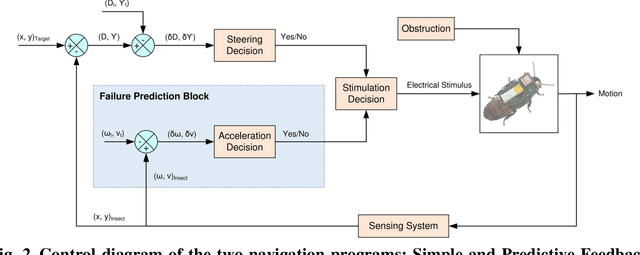
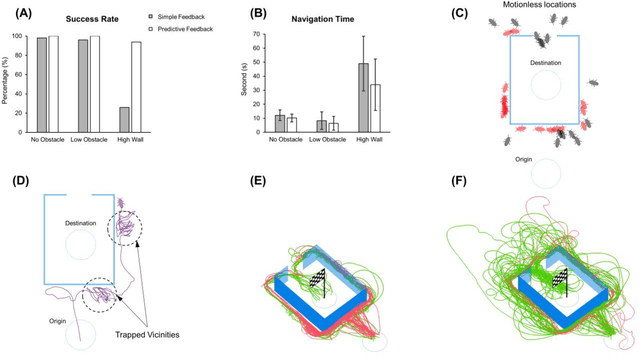
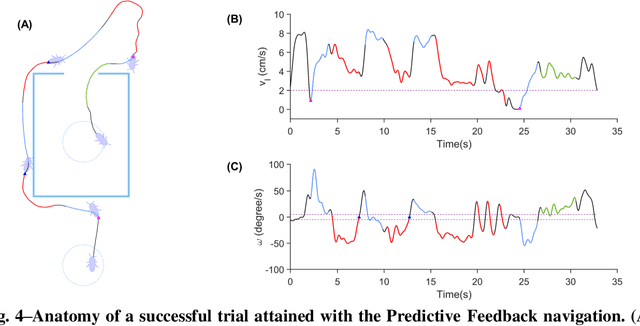
Mar 27, 2024Navigating multi-robot systems in complex terrains has always been a challenging task. This is due to the inherent limitations of traditional robots in collision avoidance, adaptation to unknown environments, and sustained energy efficiency. In order to overcome these limitations, this research proposes a solution by integrating living insects with miniature electronic controllers to enable robotic-like programmable control, and proposing a novel control algorithm for swarming. Although these creatures, called cyborg insects, have the ability to instinctively avoid collisions with neighbors and obstacles while adapting to complex terrains, there is a lack of literature on the control of multi-cyborg systems. This research gap is due to the difficulty in coordinating the movements of a cyborg system under the presence of insects' inherent individual variability in their reactions to control input. In response to this issue, we propose a novel swarm navigation algorithm addressing these challenges. The effectiveness of the algorithm is demonstrated through an experimental validation in which a cyborg swarm was successfully navigated through an unknown sandy field with obstacles and hills. This research contributes to the domain of swarm robotics and showcases the potential of integrating biological organisms with robotics and control theory to create more intelligent autonomous systems with real-world applications.
Insect-Computer Hybrid System for Autonomous Search and Rescue Mission
Jun 04, 2021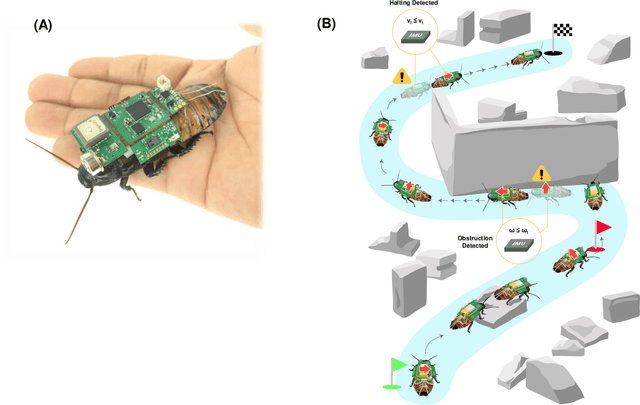
There is still a long way to go before artificial mini robots are really used for search and rescue missions in disaster-hit areas due to hindrance in power consumption, computation load of the locomotion, and obstacle-avoidance system. Insect-computer hybrid system, which is the fusion of living insect platform and microcontroller, emerges as an alternative solution. This study demonstrates the first-ever insect-computer hybrid system conceived for search and rescue missions, which is capable of autonomous navigation and human presence detection in an unstructured environment. Customized navigation control algorithm utilizing the insect's intrinsic navigation capability achieved exploration and negotiation of complex terrains. On-board high-accuracy human presence detection using infrared camera was achieved with a custom machine learning model. Low power consumption suggests system suitability for hour-long operations and its potential for realization in real-life missions.