 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Flexible FBG-Based Contact Force Sensor for Robotic Gripping Systems
Feb 06, 2025Soft robotic grippers demonstrate great potential for gently and safely handling objects; however, their full potential for executing precise and secure grasping has been limited by the lack of integrated sensors, leading to problems such as slippage and excessive force exertion. To address this challenge, we present a small and highly sensitive Fiber Bragg Grating-based force sensor designed for accurate contact force measurement. The flexible force sensor comprises a 3D-printed TPU casing with a small bump and uvula structure, a dual FBG array, and a protective tube. A series of tests have been conducted to evaluate the effectiveness of the proposed force sensor, including force calibration, repeatability test, hysteresis study, force measurement comparison, and temperature calibration and compensation tests. The results demonstrated good repeatability, with a force measurement range of 4.69 N, a high sensitivity of approximately 1169.04 pm/N, a root mean square error (RMSE) of 0.12 N, and a maximum hysteresis of 4.83%. When compared to a commercial load cell, the sensor showed a percentage error of 2.56% and an RMSE of 0.14 N. Besides, the proposed sensor validated its temperature compensation effectiveness, with a force RMSE of 0.01 N over a temperature change of 11 Celsius degree. The sensor was integrated with a soft grow-and-twine gripper to monitor interaction forces between different objects and the robotic gripper. Closed-loop force control was applied during automated pick-and-place tasks and significantly improved gripping stability, as demonstrated in tests. This force sensor can be used across manufacturing, agriculture, healthcare (like prosthetic hands), logistics, and packaging, to provide situation awareness and higher operational efficiency.
Gait-Adaptive Navigation and Human Searching in field with Cyborg Insect
Jun 06, 2024



This study focuses on improving the ability of cyborg insects to navigate autonomously during search and rescue missions in outdoor environments. We propose an algorithm that leverages data from an IMU to calculate orientation and position based on the insect's walking gait. These computed factors serve as essential feedback channels across 3 phases of our exploration. Our method functions without relying on external systems. The results of our trials, carried out in both indoor (4.8 x 6.6 m^2) and outdoor (3.5 x 6.0 m^2) settings, show that the cyborg insect is capable of seeking a human without knowing the human's position. This exploration strategy would help to bring terrestrial cyborg insects closer to practical application in real-life search and rescue (SAR) missions.
Natural-artificial hybrid swarm: Cyborg-insect group navigation in unknown obstructed soft terrain
Mar 27, 2024Navigating multi-robot systems in complex terrains has always been a challenging task. This is due to the inherent limitations of traditional robots in collision avoidance, adaptation to unknown environments, and sustained energy efficiency. In order to overcome these limitations, this research proposes a solution by integrating living insects with miniature electronic controllers to enable robotic-like programmable control, and proposing a novel control algorithm for swarming. Although these creatures, called cyborg insects, have the ability to instinctively avoid collisions with neighbors and obstacles while adapting to complex terrains, there is a lack of literature on the control of multi-cyborg systems. This research gap is due to the difficulty in coordinating the movements of a cyborg system under the presence of insects' inherent individual variability in their reactions to control input. In response to this issue, we propose a novel swarm navigation algorithm addressing these challenges. The effectiveness of the algorithm is demonstrated through an experimental validation in which a cyborg swarm was successfully navigated through an unknown sandy field with obstacles and hills. This research contributes to the domain of swarm robotics and showcases the potential of integrating biological organisms with robotics and control theory to create more intelligent autonomous systems with real-world applications.
Cyborg Beetle Achieves Efficient Autonomous Navigation Using Feedback Control
May 05, 2022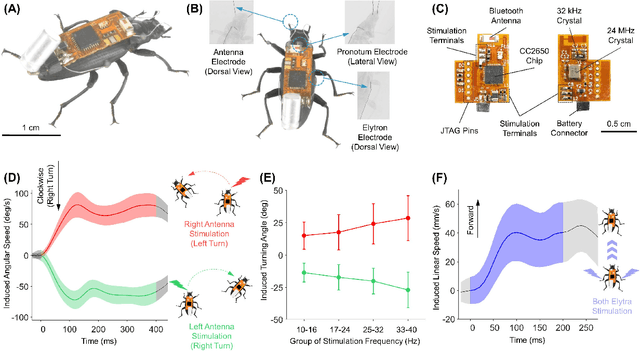
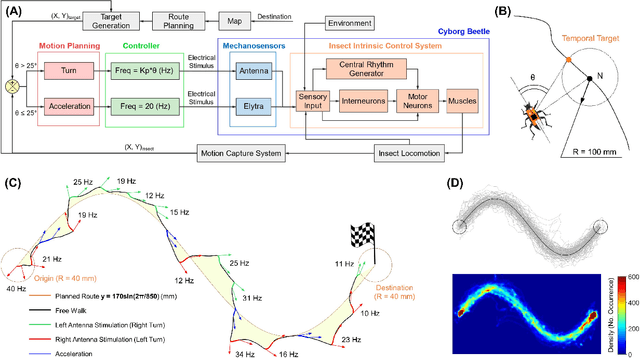
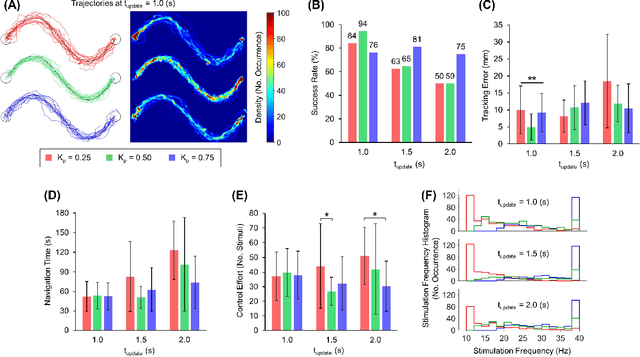
Terrestrial cyborg insects were long discussed as potential complements for insect-scale mobile robots. These cyborgs inherit the insects' outstanding locomotory skills, orchestrated by a sophisticated central nervous system and various sensory organs, favoring their maneuvers in complex terrains. However, the autonomous navigation of these cyborgs was not yet comprehensively studied. The struggle to select optimal stimuli for individual insects hinders reliable and accurate navigations. This study overcomes this problem and provides a detailed look at the terrestrial navigation of cyborg insects (darkling beetle) by implementing a feedback control system. Via a thrust controller for acceleration and a proportional controller for turning, the system regulates the stimulation parameters depending on the beetle's instantaneous status. Adjusting the system's control parameters allows reliable and precise path-following navigations (i.e., up to ~94% success rate, ~1/2 body length accuracy). Also, the system's performance can be tuned, providing flexibility to navigation applications of terrestrial cyborg insects.