 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGait-Adaptive Navigation and Human Searching in field with Cyborg Insect
Jun 06, 2024



This study focuses on improving the ability of cyborg insects to navigate autonomously during search and rescue missions in outdoor environments. We propose an algorithm that leverages data from an IMU to calculate orientation and position based on the insect's walking gait. These computed factors serve as essential feedback channels across 3 phases of our exploration. Our method functions without relying on external systems. The results of our trials, carried out in both indoor (4.8 x 6.6 m^2) and outdoor (3.5 x 6.0 m^2) settings, show that the cyborg insect is capable of seeking a human without knowing the human's position. This exploration strategy would help to bring terrestrial cyborg insects closer to practical application in real-life search and rescue (SAR) missions.
Insect-Computer Hybrid System for Autonomous Search and Rescue Mission
Jun 04, 2021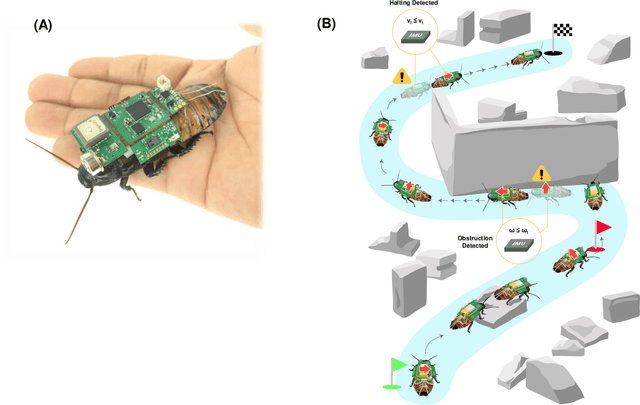
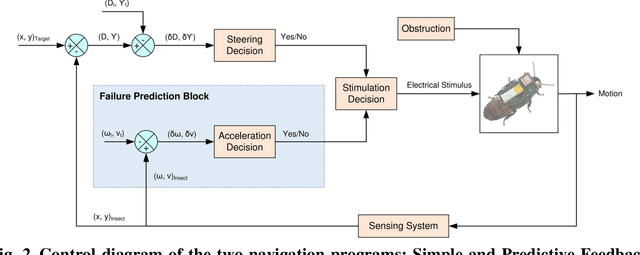
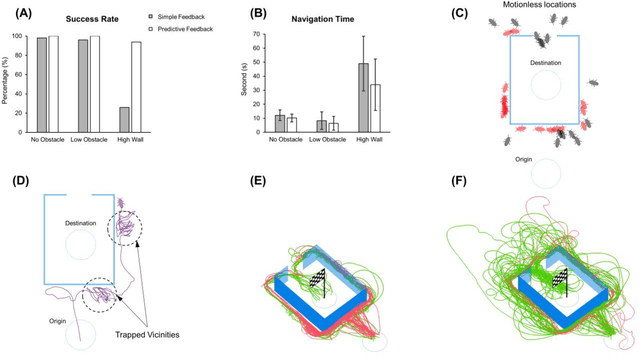
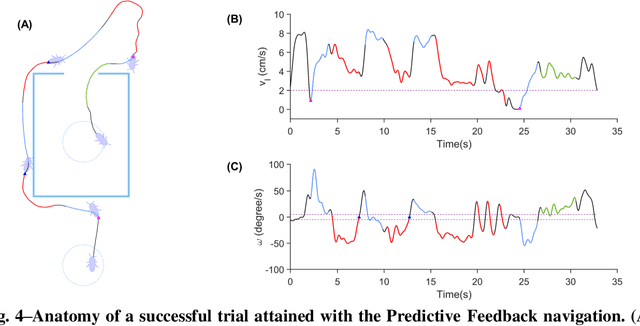
There is still a long way to go before artificial mini robots are really used for search and rescue missions in disaster-hit areas due to hindrance in power consumption, computation load of the locomotion, and obstacle-avoidance system. Insect-computer hybrid system, which is the fusion of living insect platform and microcontroller, emerges as an alternative solution. This study demonstrates the first-ever insect-computer hybrid system conceived for search and rescue missions, which is capable of autonomous navigation and human presence detection in an unstructured environment. Customized navigation control algorithm utilizing the insect's intrinsic navigation capability achieved exploration and negotiation of complex terrains. On-board high-accuracy human presence detection using infrared camera was achieved with a custom machine learning model. Low power consumption suggests system suitability for hour-long operations and its potential for realization in real-life missions.