 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Flexible FBG-Based Contact Force Sensor for Robotic Gripping Systems
Feb 06, 2025Soft robotic grippers demonstrate great potential for gently and safely handling objects; however, their full potential for executing precise and secure grasping has been limited by the lack of integrated sensors, leading to problems such as slippage and excessive force exertion. To address this challenge, we present a small and highly sensitive Fiber Bragg Grating-based force sensor designed for accurate contact force measurement. The flexible force sensor comprises a 3D-printed TPU casing with a small bump and uvula structure, a dual FBG array, and a protective tube. A series of tests have been conducted to evaluate the effectiveness of the proposed force sensor, including force calibration, repeatability test, hysteresis study, force measurement comparison, and temperature calibration and compensation tests. The results demonstrated good repeatability, with a force measurement range of 4.69 N, a high sensitivity of approximately 1169.04 pm/N, a root mean square error (RMSE) of 0.12 N, and a maximum hysteresis of 4.83%. When compared to a commercial load cell, the sensor showed a percentage error of 2.56% and an RMSE of 0.14 N. Besides, the proposed sensor validated its temperature compensation effectiveness, with a force RMSE of 0.01 N over a temperature change of 11 Celsius degree. The sensor was integrated with a soft grow-and-twine gripper to monitor interaction forces between different objects and the robotic gripper. Closed-loop force control was applied during automated pick-and-place tasks and significantly improved gripping stability, as demonstrated in tests. This force sensor can be used across manufacturing, agriculture, healthcare (like prosthetic hands), logistics, and packaging, to provide situation awareness and higher operational efficiency.
A Three-limb Teleoperated Robotic System with Foot Control for Flexible Endoscopic Surgery
Jul 12, 2020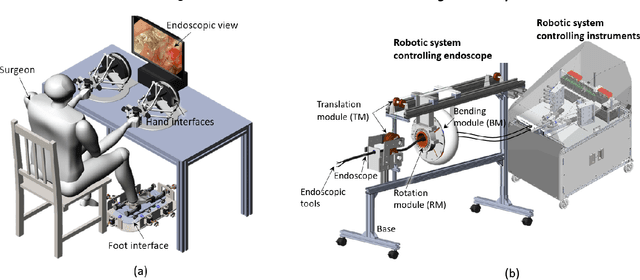
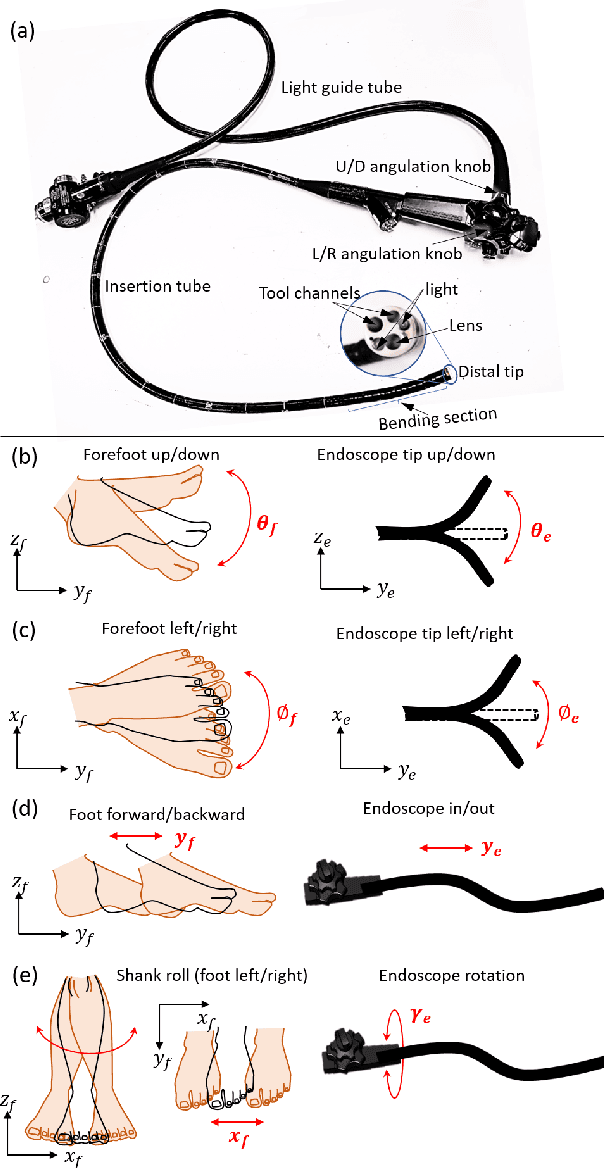
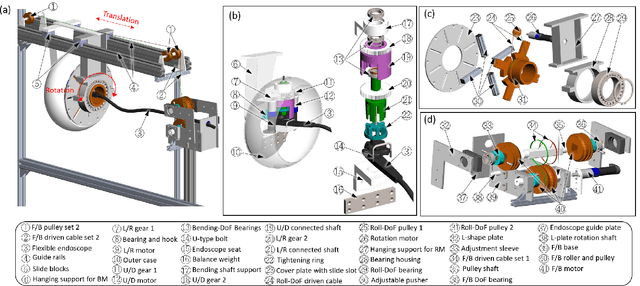
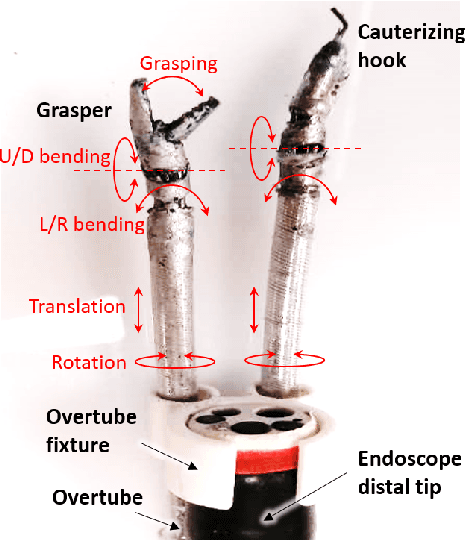
Flexible endoscopy requires high skills to manipulate both the endoscope and associated instruments. In most robotic flexible endoscopic systems, the endoscope and instruments are controlled separately by two operators, which may result in communication errors and inefficient operation. We present a novel teleoperation robotic endoscopic system that can be commanded by a surgeon alone. This 13 degrees-of-freedom (DoF) system integrates a foot-controlled robotic flexible endoscope and two hand-controlled robotic endoscopic instruments (a robotic grasper and a robotic cauterizing hook). A foot-controlled human-machine interface maps the natural foot gestures to the 4-DoF movements of the endoscope, and two hand-controlled interfaces map the movements of the two hands to the two instruments individually. The proposed robotic system was validated in an ex-vivo experiment carried out by six subjects, where foot control was also compared with a sequential clutch-based hand control scheme. The participants could successfully teleoperate the endoscope and the two instruments to cut the tissues at scattered target areas in a porcine stomach. Foot control yielded 43.7% faster task completion and required less mental effort as compared to the clutch-based hand control scheme. The system introduced in this paper is intuitive for three-limb manipulation even for operators without experience of handling the endoscope and robotic instruments. This three-limb teleoperated robotic system enables one surgeon to intuitively control three endoscopic tools which normally require two operators, leading to reduced manpower, less communication errors, and improved efficiency.