 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhen Evolutionary Computation Meets Privacy
Mar 22, 2023



Recently, evolutionary computation (EC) has been promoted by machine learning, distributed computing, and big data technologies, resulting in new research directions of EC like distributed EC and surrogate-assisted EC. These advances have significantly improved the performance and the application scope of EC, but also trigger privacy leakages, such as the leakage of optimal results and surrogate model. Accordingly, evolutionary computation combined with privacy protection is becoming an emerging topic. However, privacy concerns in evolutionary computation lack a systematic exploration, especially for the object, motivation, position, and method of privacy protection. To this end, in this paper, we discuss three typical optimization paradigms (i.e., \textit{centralized optimization, distributed optimization, and data-driven optimization}) to characterize optimization modes of evolutionary computation and propose BOOM to sort out privacy concerns in evolutionary computation. Specifically, the centralized optimization paradigm allows clients to outsource optimization problems to the centralized server and obtain optimization solutions from the server. While the distributed optimization paradigm exploits the storage and computational power of distributed devices to solve optimization problems. Also, the data-driven optimization paradigm utilizes data collected in history to tackle optimization problems lacking explicit objective functions. Particularly, this paper adopts BOOM to characterize the object and motivation of privacy protection in three typical optimization paradigms and discusses potential privacy-preserving technologies balancing optimization performance and privacy guarantees in three typical optimization paradigms. Furthermore, this paper attempts to foresee some new research directions of privacy-preserving evolutionary computation.
A Survey of Secure Computation Using Trusted Execution Environments
Feb 23, 2023As an essential technology underpinning trusted computing, the trusted execution environment (TEE) allows one to launch computation tasks on both on- and off-premises data while assuring confidentiality and integrity. This article provides a systematic review and comparison of TEE-based secure computation protocols. We first propose a taxonomy that classifies secure computation protocols into three major categories, namely secure outsourced computation, secure distributed computation and secure multi-party computation. To enable a fair comparison of these protocols, we also present comprehensive assessment criteria with respect to four aspects: setting, methodology, security and performance. Based on these criteria, we review, discuss and compare the state-of-the-art TEE-based secure computation protocols for both general-purpose computation functions and special-purpose ones, such as privacy-preserving machine learning and encrypted database queries. To the best of our knowledge, this article is the first survey to review TEE-based secure computation protocols and the comprehensive comparison can serve as a guideline for selecting suitable protocols for deployment in practice. Finally, we also discuss several future research directions and challenges.
A Three-limb Teleoperated Robotic System with Foot Control for Flexible Endoscopic Surgery
Jul 12, 2020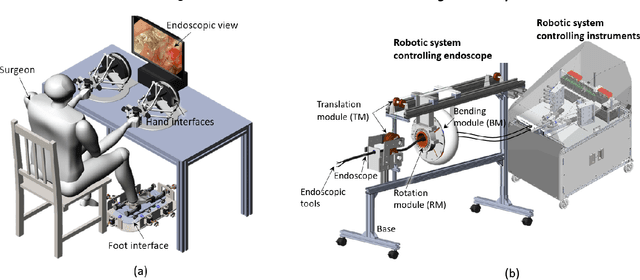
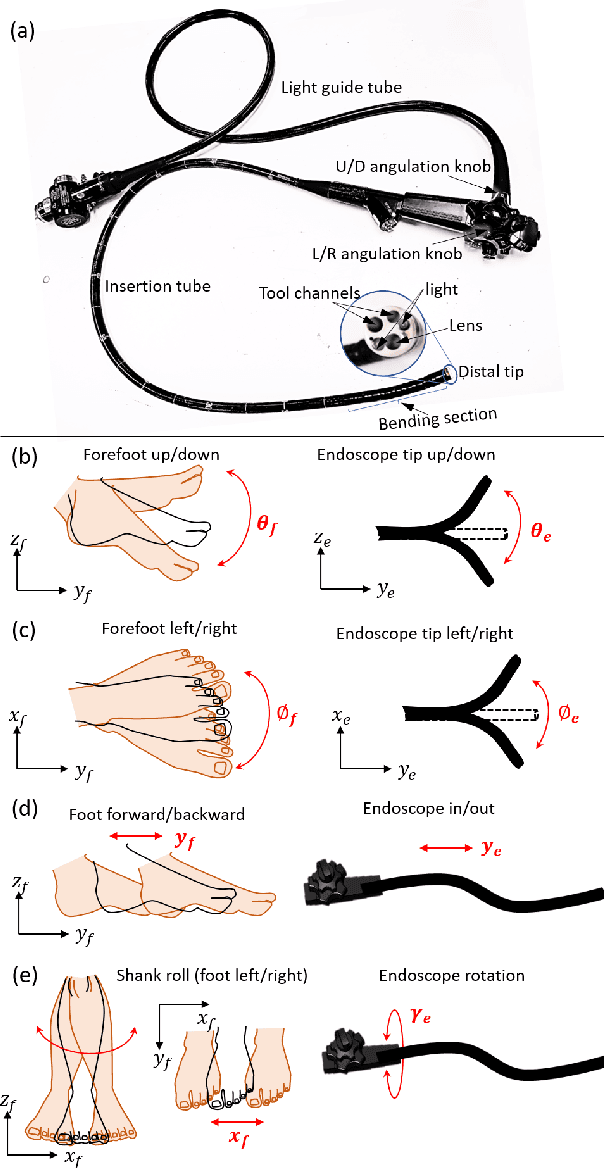
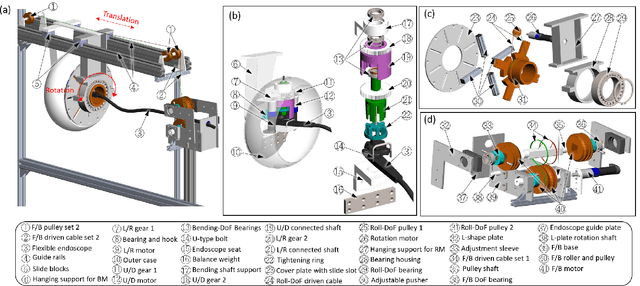
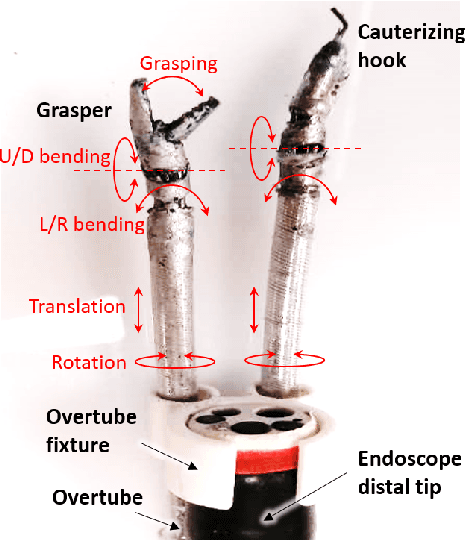
Flexible endoscopy requires high skills to manipulate both the endoscope and associated instruments. In most robotic flexible endoscopic systems, the endoscope and instruments are controlled separately by two operators, which may result in communication errors and inefficient operation. We present a novel teleoperation robotic endoscopic system that can be commanded by a surgeon alone. This 13 degrees-of-freedom (DoF) system integrates a foot-controlled robotic flexible endoscope and two hand-controlled robotic endoscopic instruments (a robotic grasper and a robotic cauterizing hook). A foot-controlled human-machine interface maps the natural foot gestures to the 4-DoF movements of the endoscope, and two hand-controlled interfaces map the movements of the two hands to the two instruments individually. The proposed robotic system was validated in an ex-vivo experiment carried out by six subjects, where foot control was also compared with a sequential clutch-based hand control scheme. The participants could successfully teleoperate the endoscope and the two instruments to cut the tissues at scattered target areas in a porcine stomach. Foot control yielded 43.7% faster task completion and required less mental effort as compared to the clutch-based hand control scheme. The system introduced in this paper is intuitive for three-limb manipulation even for operators without experience of handling the endoscope and robotic instruments. This three-limb teleoperated robotic system enables one surgeon to intuitively control three endoscopic tools which normally require two operators, leading to reduced manpower, less communication errors, and improved efficiency.