 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCOMPASS: A Multi-Turn Benchmark for Tool-Mediated Planning & Preference Optimization
Oct 08, 2025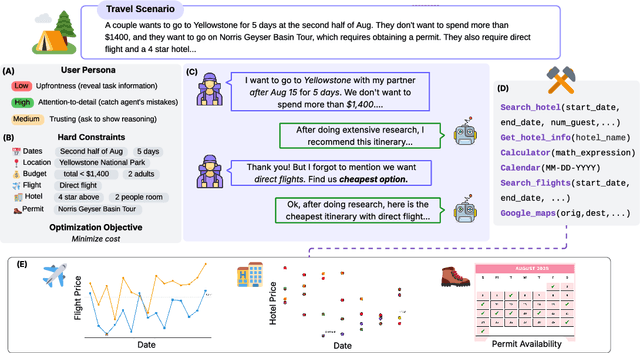
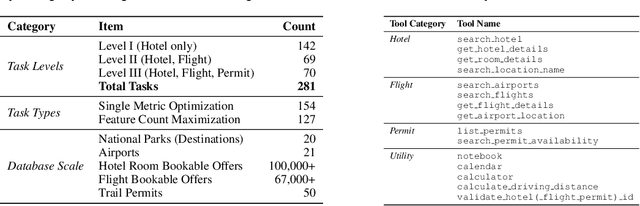
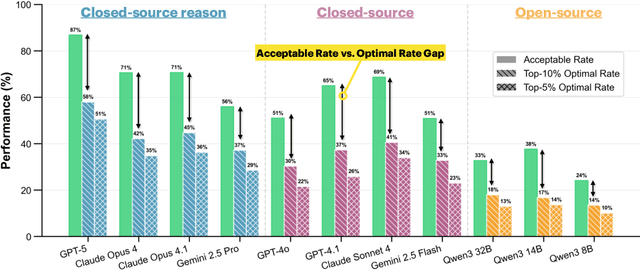
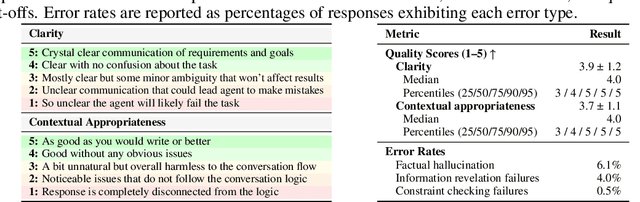
Real-world large language model (LLM) agents must master strategic tool use and user preference optimization through multi-turn interactions to assist users with complex planning tasks. We introduce COMPASS (Constrained Optimization through Multi-turn Planning and Strategic Solutions), a benchmark that evaluates agents on realistic travel-planning scenarios. We cast travel planning as a constrained preference optimization problem, where agents must satisfy hard constraints while simultaneously optimizing soft user preferences. To support this, we build a realistic travel database covering transportation, accommodation, and ticketing for 20 U.S. National Parks, along with a comprehensive tool ecosystem that mirrors commercial booking platforms. Evaluating state-of-the-art models, we uncover two critical gaps: (i) an acceptable-optimal gap, where agents reliably meet constraints but fail to optimize preferences, and (ii) a plan-coordination gap, where performance collapses on multi-service (flight and hotel) coordination tasks, especially for open-source models. By grounding reasoning and planning in a practical, user-facing domain, COMPASS provides a benchmark that directly measures an agent's ability to optimize user preferences in realistic tasks, bridging theoretical advances with real-world impact.
Learning to Reason for Hallucination Span Detection
Oct 02, 2025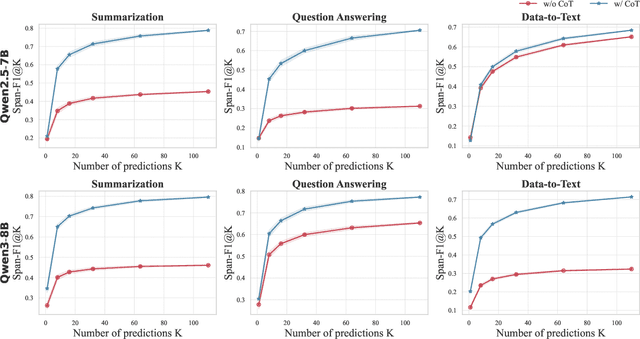
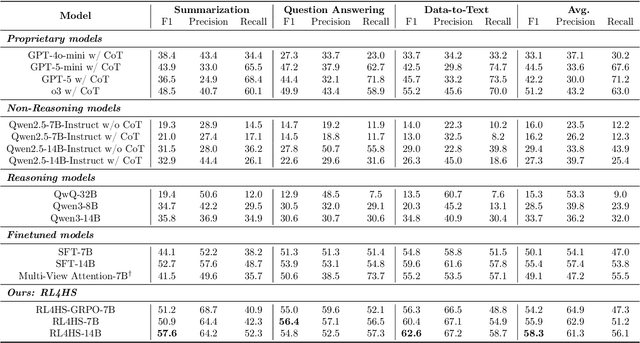
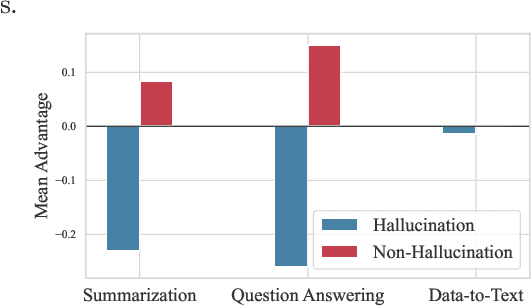
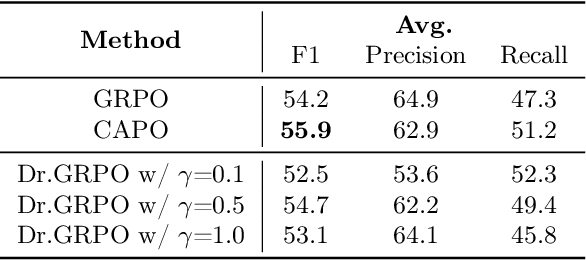
Large language models (LLMs) often generate hallucinations -- unsupported content that undermines reliability. While most prior works frame hallucination detection as a binary task, many real-world applications require identifying hallucinated spans, which is a multi-step decision making process. This naturally raises the question of whether explicit reasoning can help the complex task of detecting hallucination spans. To answer this question, we first evaluate pretrained models with and without Chain-of-Thought (CoT) reasoning, and show that CoT reasoning has the potential to generate at least one correct answer when sampled multiple times. Motivated by this, we propose RL4HS, a reinforcement learning framework that incentivizes reasoning with a span-level reward function. RL4HS builds on Group Relative Policy Optimization and introduces Class-Aware Policy Optimization to mitigate reward imbalance issue. Experiments on the RAGTruth benchmark (summarization, question answering, data-to-text) show that RL4HS surpasses pretrained reasoning models and supervised fine-tuning, demonstrating the necessity of reinforcement learning with span-level rewards for detecting hallucination spans.
Mutual Reinforcement of LLM Dialogue Synthesis and Summarization Capabilities for Few-Shot Dialogue Summarization
Feb 24, 2025In this work, we propose Mutual Reinforcing Data Synthesis (MRDS) within LLMs to improve few-shot dialogue summarization task. Unlike prior methods that require external knowledge, we mutually reinforce the LLM\'s dialogue synthesis and summarization capabilities, allowing them to complement each other during training and enhance overall performances. The dialogue synthesis capability is enhanced by directed preference optimization with preference scoring from summarization capability. The summarization capability is enhanced by the additional high quality dialogue-summary paired data produced by the dialogue synthesis capability. By leveraging the proposed MRDS mechanism, we elicit the internal knowledge of LLM in the format of synthetic data, and use it to augment the few-shot real training dataset. Empirical results demonstrate that our method improves dialogue summarization, achieving a 1.5% increase in ROUGE scores and a 0.3% improvement in BERT scores in few-shot settings. Furthermore, our method attains the highest average scores in human evaluations, surpassing both the pre-trained models and the baselines fine-tuned solely for summarization tasks.
Corpus Synthesis for Zero-shot ASR domain Adaptation using Large Language Models
Sep 18, 2023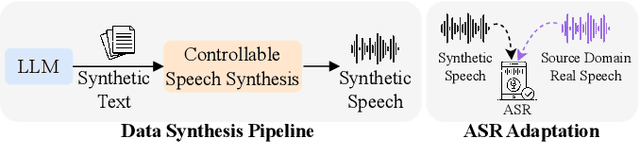

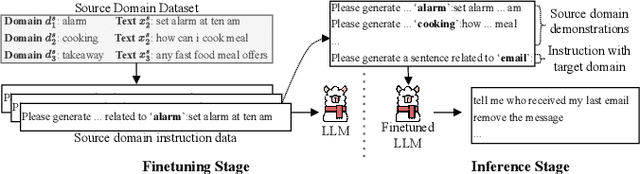
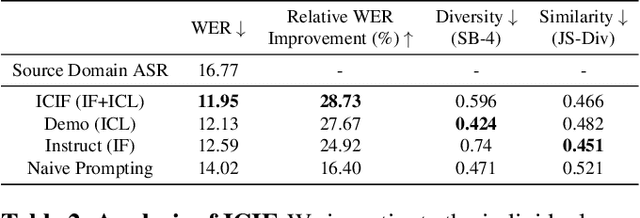
While Automatic Speech Recognition (ASR) systems are widely used in many real-world applications, they often do not generalize well to new domains and need to be finetuned on data from these domains. However, target-domain data usually are not readily available in many scenarios. In this paper, we propose a new strategy for adapting ASR models to new target domains without any text or speech from those domains. To accomplish this, we propose a novel data synthesis pipeline that uses a Large Language Model (LLM) to generate a target domain text corpus, and a state-of-the-art controllable speech synthesis model to generate the corresponding speech. We propose a simple yet effective in-context instruction finetuning strategy to increase the effectiveness of LLM in generating text corpora for new domains. Experiments on the SLURP dataset show that the proposed method achieves an average relative word error rate improvement of $28\%$ on unseen target domains without any performance drop in source domains.
Text is All You Need: Personalizing ASR Models using Controllable Speech Synthesis
Mar 27, 2023



Adapting generic speech recognition models to specific individuals is a challenging problem due to the scarcity of personalized data. Recent works have proposed boosting the amount of training data using personalized text-to-speech synthesis. Here, we ask two fundamental questions about this strategy: when is synthetic data effective for personalization, and why is it effective in those cases? To address the first question, we adapt a state-of-the-art automatic speech recognition (ASR) model to target speakers from four benchmark datasets representative of different speaker types. We show that ASR personalization with synthetic data is effective in all cases, but particularly when (i) the target speaker is underrepresented in the global data, and (ii) the capacity of the global model is limited. To address the second question of why personalized synthetic data is effective, we use controllable speech synthesis to generate speech with varied styles and content. Surprisingly, we find that the text content of the synthetic data, rather than style, is important for speaker adaptation. These results lead us to propose a data selection strategy for ASR personalization based on speech content.
Style Equalization: Unsupervised Learning of Controllable Generative Sequence Models
Oct 06, 2021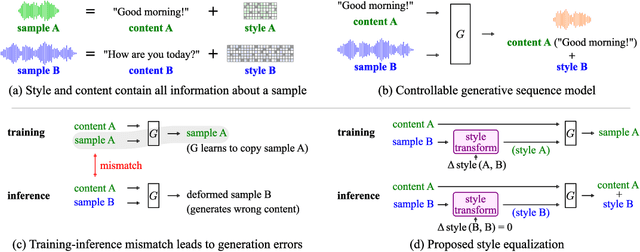
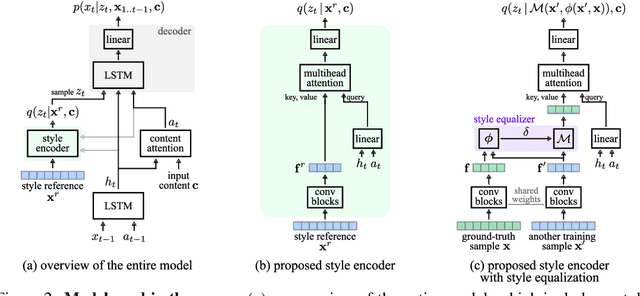
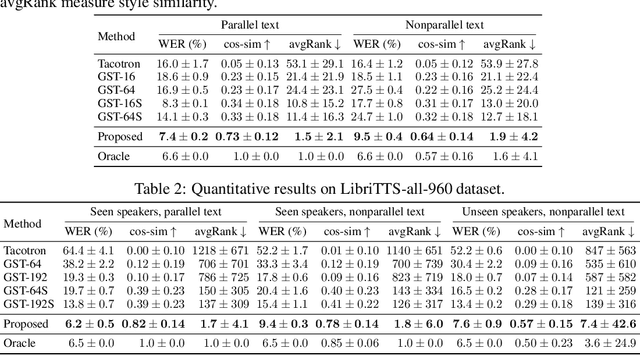

Controllable generative sequence models with the capability to extract and replicate the style of specific examples enable many applications, including narrating audiobooks in different voices, auto-completing and auto-correcting written handwriting, and generating missing training samples for downstream recognition tasks. However, typical training algorithms for these controllable sequence generative models suffer from the training-inference mismatch, where the same sample is used as content and style input during training but different samples are given during inference. In this paper, we tackle the training-inference mismatch encountered during unsupervised learning of controllable generative sequence models. By introducing a style transformation module that we call style equalization, we enable training using different content and style samples and thereby mitigate the training-inference mismatch. To demonstrate its generality, we applied style equalization to text-to-speech and text-to-handwriting synthesis on three datasets. Our models achieve state-of-the-art style replication with a similar mean style opinion score as the real data. Moreover, the proposed method enables style interpolation between sequences and generates novel styles.
Learning Human Activities and Object Affordances from RGB-D Videos
May 06, 2013



Understanding human activities and object affordances are two very important skills, especially for personal robots which operate in human environments. In this work, we consider the problem of extracting a descriptive labeling of the sequence of sub-activities being performed by a human, and more importantly, of their interactions with the objects in the form of associated affordances. Given a RGB-D video, we jointly model the human activities and object affordances as a Markov random field where the nodes represent objects and sub-activities, and the edges represent the relationships between object affordances, their relations with sub-activities, and their evolution over time. We formulate the learning problem using a structural support vector machine (SSVM) approach, where labelings over various alternate temporal segmentations are considered as latent variables. We tested our method on a challenging dataset comprising 120 activity videos collected from 4 subjects, and obtained an accuracy of 79.4% for affordance, 63.4% for sub-activity and 75.0% for high-level activity labeling. We then demonstrate the use of such descriptive labeling in performing assistive tasks by a PR2 robot.
Contextually Guided Semantic Labeling and Search for 3D Point Clouds
Sep 05, 2012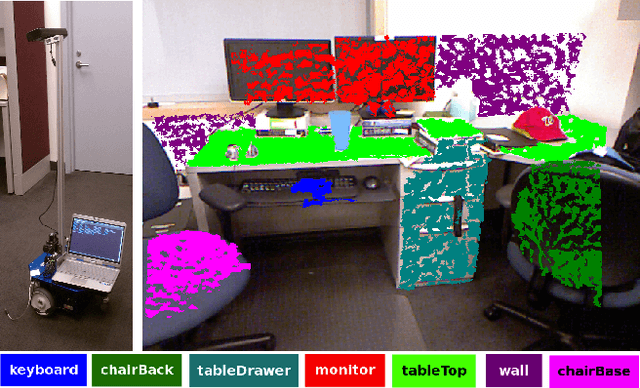
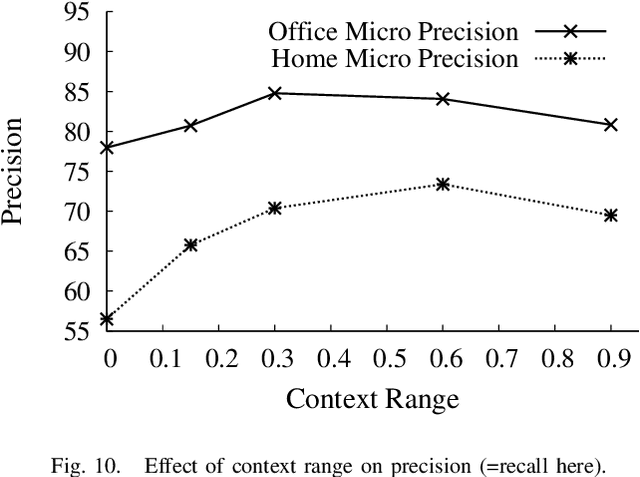

RGB-D cameras, which give an RGB image to- gether with depths, are becoming increasingly popular for robotic perception. In this paper, we address the task of detecting commonly found objects in the 3D point cloud of indoor scenes obtained from such cameras. Our method uses a graphical model that captures various features and contextual relations, including the local visual appearance and shape cues, object co-occurence relationships and geometric relationships. With a large number of object classes and relations, the model's parsimony becomes important and we address that by using multiple types of edge potentials. We train the model using a maximum-margin learning approach. In our experiments over a total of 52 3D scenes of homes and offices (composed from about 550 views), we get a performance of 84.06% and 73.38% in labeling office and home scenes respectively for 17 object classes each. We also present a method for a robot to search for an object using the learned model and the contextual information available from the current labelings of the scene. We applied this algorithm successfully on a mobile robot for the task of finding 12 object classes in 10 different offices and achieved a precision of 97.56% with 78.43% recall.
Human Activity Learning using Object Affordances from RGB-D Videos
Aug 04, 2012

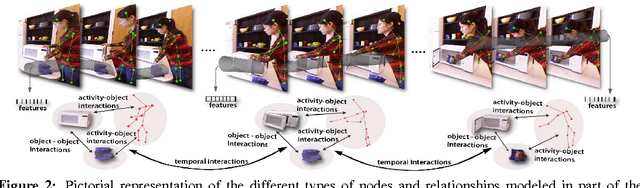
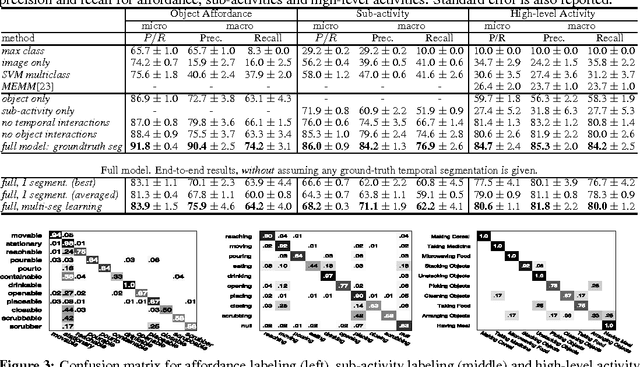
Human activities comprise several sub-activities performed in a sequence and involve interactions with various objects. This makes reasoning about the object affordances a central task for activity recognition. In this work, we consider the problem of jointly labeling the object affordances and human activities from RGB-D videos. We frame the problem as a Markov Random Field where the nodes represent objects and sub-activities, and the edges represent the relationships between object affordances, their relations with sub-activities, and their evolution over time. We formulate the learning problem using a structural SVM approach, where labeling over various alternate temporal segmentations are considered as latent variables. We tested our method on a dataset comprising 120 activity videos collected from four subjects, and obtained an end-to-end precision of 81.8% and recall of 80.0% for labeling the activities.
Labeling 3D scenes for Personal Assistant Robots
Jun 28, 2011



Inexpensive RGB-D cameras that give an RGB image together with depth data have become widely available. We use this data to build 3D point clouds of a full scene. In this paper, we address the task of labeling objects in this 3D point cloud of a complete indoor scene such as an office. We propose a graphical model that captures various features and contextual relations, including the local visual appearance and shape cues, object co-occurrence relationships and geometric relationships. With a large number of object classes and relations, the model's parsimony becomes important and we address that by using multiple types of edge potentials. The model admits efficient approximate inference, and we train it using a maximum-margin learning approach. In our experiments over a total of 52 3D scenes of homes and offices (composed from about 550 views, having 2495 segments labeled with 27 object classes), we get a performance of 84.06% in labeling 17 object classes for offices, and 73.38% in labeling 17 object classes for home scenes. Finally, we applied these algorithms successfully on a mobile robot for the task of finding an object in a large cluttered room.