 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Impact to Insight: Dynamics-Aware Proprioceptive Terrain Sensing on Granular Media
Apr 02, 2026Robots that traverse natural terrain must interpret contact forces generated under highly dynamic conditions. However, most terrain characterization approaches rely on quasi-static assumptions that neglect velocity- and acceleration-dependent effects arising during impact and rapid stance transitions. In this work, we investigate granular terrain interaction during high-speed hopping and develop a physics-based framework for dynamic terrain characterization using proprioceptive sensing alone. Through controlled hopping experiments with systematically varied impact speed and leg compliance, our measurements reveal that quasi-static based assumptions lead to large discrepancies in granular terrain property estimation during high-speed hopping, particularly upon touchdown and controller-induced stiffness transitions. Velocity-dependent drag alone cannot explain these discrepancies. Instead, acceleration-dependent added-mass effects-associated with grain entrainment beneath the foot-dominate transient force responses. We integrate this force decomposition with a momentum-observer-based estimator that compensates for rigid-body inertia and gravity, and introduce an acceleration-aware weighted regression to account for increased force variance during high-acceleration events. Together, these methods enable consistent recovery of granular stiffness parameters across locomotion conditions, closely matching linear-actuator ground truth. Our results demonstrate that accurate terrain inference during high-speed locomotion requires explicit treatment of acceleration-dependent granular effects, and provide a foundation for robots to characterize complex deformable terrain during dynamic exploration of terrestrial and planetary environments.
Legged Autonomous Surface Science In Analogue Environments (LASSIE): Making Every Robotic Step Count in Planetary Exploration
Mar 20, 2026The ability to efficiently and effectively explore planetary surfaces is currently limited by the capability of wheeled rovers to traverse challenging terrains, and by pre-programmed data acquisition plans with limited in-situ flexibility. In this paper, we present two novel approaches to address these limitations: (i) high-mobility legged robots that use direct surface interactions to collect rich information about the terrain's mechanics to guide exploration; (ii) human-inspired data acquisition algorithms that enable robots to reason about scientific hypotheses and adapt exploration priorities based on incoming ground-sensing measurements. We successfully verify our approach through lab work and field deployments in two planetary analog environments. The new capability for legged robots to measure soil mechanical properties is shown to enable effective traversal of challenging terrains. When coupled with other geologic properties (e.g., composition, thermal properties, and grain size data etc), soil mechanical measurements reveal key factors governing the formation and development of geologic environments. We then demonstrate how human-inspired algorithms turn terrain-sensing robots into teammates, by supporting more flexible and adaptive data collection decisions with human scientists. Our approach therefore enables exploration of a wider range of planetary environments and new substrate investigation opportunities through integrated human-robot systems that support maximum scientific return.
Proprioceptive Safe Active Navigation and Exploration for Planetary Environments
Mar 09, 2026Deformable granular terrains introduce significant locomotion and immobilization risks in planetary exploration and are difficult to detect via remote sensing (e.g., vision). Legged robots can sense terrain properties through leg-terrain interactions during locomotion, offering a direct means to assess traversability in deformable environments. How to systematically exploit this interaction-derived information for navigation planning, however, remains underexplored. We address this gap by presenting PSANE, a Proprioceptive Safe Active Navigation and Exploration framework that leverages leg-terrain interaction measurements for safe navigation and exploration in unknown deformable environments. PSANE learns a traversability model via Gaussian Process regression to estimate and certify safe regions and identify exploration frontiers online, and integrates these estimates with a reactive controller for real-time navigation. Frontier selection is formulated as a multi-objective optimization that balances safe-set expansion probability and goal-directed cost, with subgoals selected via scalarization over the Pareto-optimal frontier set. PSANE safely explores unknown granular terrain and reaches specified goals using only proprioceptively estimated traversability, while achieving performance improvements over baseline methods.
Inverse Resistive Force Theory (I-RFT): Learning granular properties through robot-terrain physical interactions
Mar 08, 2026For robots to navigate safely and efficiently on soft, granular terrains, it is crucial to gather information about the terrain's mechanical properties, which directly affect locomotion performance. Recent research has developed robotic legs that can accurately sense ground reaction forces during locomotion. However, existing tests of granular property estimation often rely on specific foot trajectories, such as vertical penetration or horizontal shear, limiting their applicability during natural locomotion. To address this limitation, we introduce a physics-informed machine learning framework, Inverse Resistive Force Theory (I-RFT), which integrates the Granular Resistive Force Theory model with Gaussian Processes to infer terrain properties from proprioceptively measured contact forces under arbitrary gait trajectories. By embedding the granular force model within the learning process, I-RFT preserves physical consistency while enabling generalization across diverse motion primitives. Experimental results demonstrate that I-RFT accurately estimates terrain properties across multiple gait trajectories and toe shapes. Moreover, we show that the quantified uncertainty over the terrain resistance stress map could enable robots to optimize foot design and gait trajectories for efficient information gathering. This approach establishes a new foundation for data-efficient characterization of complex granular environments and opens new avenues for locomotion strategies that actively adapt gait for autonomous terrain exploration.
Safe Active Navigation and Exploration for Planetary Environments Using Proprioceptive Measurements
Oct 21, 2025Legged robots can sense terrain through force interactions during locomotion, offering more reliable traversability estimates than remote sensing and serving as scouts for guiding wheeled rovers in challenging environments. However, even legged scouts face challenges when traversing highly deformable or unstable terrain. We present Safe Active Exploration for Granular Terrain (SAEGT), a navigation framework that enables legged robots to safely explore unknown granular environments using proprioceptive sensing, particularly where visual input fails to capture terrain deformability. SAEGT estimates the safe region and frontier region online from leg-terrain interactions using Gaussian Process regression for traversability assessment, with a reactive controller for real-time safe exploration and navigation. SAEGT demonstrated its ability to safely explore and navigate toward a specified goal using only proprioceptively estimated traversability in simulation.
Effect of Gait Design on Proprioceptive Sensing of Terrain Properties in a Quadrupedal Robot
Sep 26, 2025In-situ robotic exploration is an important tool for advancing knowledge of geological processes that describe the Earth and other Planetary bodies. To inform and enhance operations for these roving laboratories, it is imperative to understand the terramechanical properties of their environments, especially for traversing on loose, deformable substrates. Recent research suggested that legged robots with direct-drive and low-gear ratio actuators can sensitively detect external forces, and therefore possess the potential to measure terrain properties with their legs during locomotion, providing unprecedented sampling speed and density while accessing terrains previously too risky to sample. This paper explores these ideas by investigating the impact of gait on proprioceptive terrain sensing accuracy, particularly comparing a sensing-oriented gait, Crawl N' Sense, with a locomotion-oriented gait, Trot-Walk. Each gait's ability to measure the strength and texture of deformable substrate is quantified as the robot locomotes over a laboratory transect consisting of a rigid surface, loose sand, and loose sand with synthetic surface crusts. Our results suggest that with both the sensing-oriented crawling gait and locomotion-oriented trot gait, the robot can measure a consistent difference in the strength (in terms of penetration resistance) between the low- and high-resistance substrates; however, the locomotion-oriented trot gait contains larger magnitude and variance in measurements. Furthermore, the slower crawl gait can detect brittle ruptures of the surface crusts with significantly higher accuracy than the faster trot gait. Our results offer new insights that inform legged robot "sensing during locomotion" gait design and planning for scouting the terrain and producing scientific measurements on other worlds to advance our understanding of their geology and formation.
Bio-inspired tail oscillation enables robot fast crawling on deformable granular terrains
Sep 15, 2025



Deformable substrates such as sand and mud present significant challenges for terrestrial robots due to complex robot-terrain interactions. Inspired by mudskippers, amphibious animals that naturally adjust their tail morphology and movement jointly to navigate such environments, we investigate how tail design and control can jointly enhance flipper-driven locomotion on granular media. Using a bio-inspired robot modeled after the mudskipper, we experimentally compared locomotion performance between idle and actively oscillating tail configurations. Tail oscillation increased robot speed by 67% and reduced body drag by 46%. Shear force measurements revealed that this improvement was enabled by tail oscillation fluidizing the substrate, thereby reducing resistance. Additionally, tail morphology strongly influenced the oscillation strategy: designs with larger horizontal surface areas leveraged the oscillation-reduced shear resistance more effectively by limiting insertion depth. Based on these findings, we present a design principle to inform tail action selection based on substrate strength and tail morphology. Our results offer new insights into tail design and control for improving robot locomotion on deformable substrates, with implications for agricultural robotics, search and rescue, and environmental exploration.
Granular Loco-Manipulation: Repositioning Rocks Through Strategic Sand Avalanche
May 19, 2025Legged robots have the potential to leverage obstacles to climb steep sand slopes. However, efficiently repositioning these obstacles to desired locations is challenging. Here we present DiffusiveGRAIN, a learning-based method that enables a multi-legged robot to strategically induce localized sand avalanches during locomotion and indirectly manipulate obstacles. We conducted 375 trials, systematically varying obstacle spacing, robot orientation, and leg actions in 75 of them. Results show that the movement of closely-spaced obstacles exhibits significant interference, requiring joint modeling. In addition, different multi-leg excavation actions could cause distinct robot state changes, necessitating integrated planning of manipulation and locomotion. To address these challenges, DiffusiveGRAIN includes a diffusion-based environment predictor to capture multi-obstacle movements under granular flow interferences and a robot state predictor to estimate changes in robot state from multi-leg action patterns. Deployment experiments (90 trials) demonstrate that by integrating the environment and robot state predictors, the robot can autonomously plan its movements based on loco-manipulation goals, successfully shifting closely located rocks to desired locations in over 65% of trials. Our study showcases the potential for a locomoting robot to strategically manipulate obstacles to achieve improved mobility on challenging terrains.
Adaptive Locomotion on Mud through Proprioceptive Sensing of Substrate Properties
Apr 28, 2025Muddy terrains present significant challenges for terrestrial robots, as subtle changes in composition and water content can lead to large variations in substrate strength and force responses, causing the robot to slip or get stuck. This paper presents a method to estimate mud properties using proprioceptive sensing, enabling a flipper-driven robot to adapt its locomotion through muddy substrates of varying strength. First, we characterize mud reaction forces through actuator current and position signals from a statically mounted robotic flipper. We use the measured force to determine key coefficients that characterize intrinsic mud properties. The proprioceptively estimated coefficients match closely with measurements from a lab-grade load cell, validating the effectiveness of the proposed method. Next, we extend the method to a locomoting robot to estimate mud properties online as it crawls across different mud mixtures. Experimental data reveal that mud reaction forces depend sensitively on robot motion, requiring joint analysis of robot movement with proprioceptive force to determine mud properties correctly. Lastly, we deploy this method in a flipper-driven robot moving across muddy substrates of varying strengths, and demonstrate that the proposed method allows the robot to use the estimated mud properties to adapt its locomotion strategy, and successfully avoid locomotion failures. Our findings highlight the potential of proprioception-based terrain sensing to enhance robot mobility in complex, deformable natural environments, paving the way for more robust field exploration capabilities.
A bio-inspired sand-rolling robot: effect of body shape on sand rolling performance
Mar 18, 2025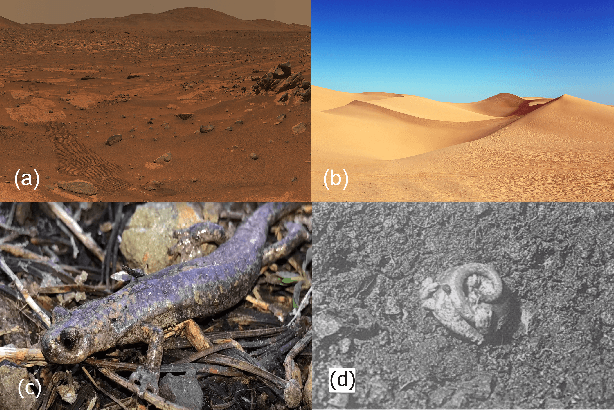
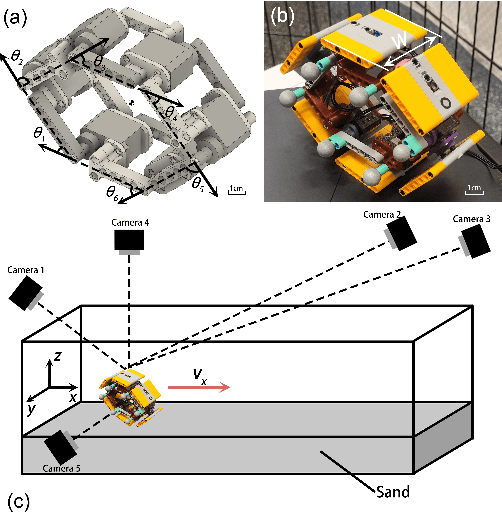
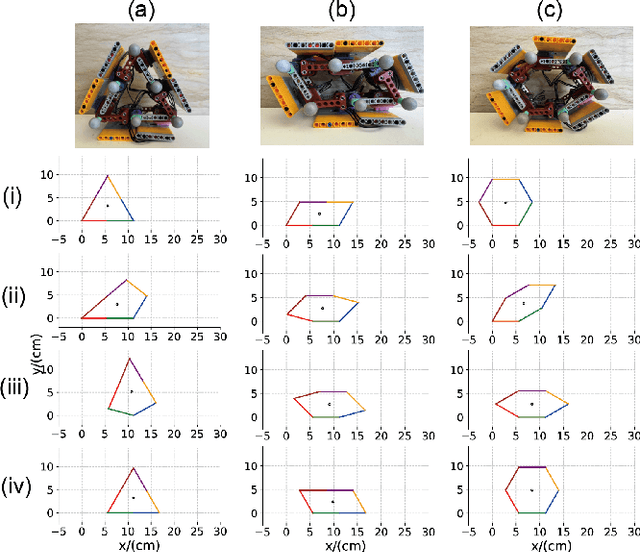
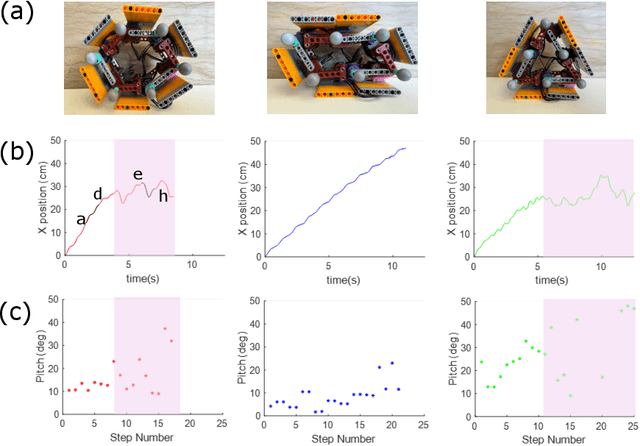
The capability of effectively moving on complex terrains such as sand and gravel can empower our robots to robustly operate in outdoor environments, and assist with critical tasks such as environment monitoring, search-and-rescue, and supply delivery. Inspired by the Mount Lyell salamander's ability to curl its body into a loop and effectively roll down {\Revision hill slopes}, in this study we develop a sand-rolling robot and investigate how its locomotion performance is governed by the shape of its body. We experimentally tested three different body shapes: Hexagon, Quadrilateral, and Triangle. We found that Hexagon and Triangle can achieve a faster rolling speed on sand, but exhibited more frequent failures of getting stuck. Analysis of the interaction between robot and sand revealed the failure mechanism: the deformation of the sand produced a local ``sand incline'' underneath robot contact segments, increasing the effective region of supporting polygon (ERSP) and preventing the robot from shifting its center of mass (CoM) outside the ERSP to produce sustainable rolling. Based on this mechanism, a highly-simplified model successfully captured the critical body pitch for each rolling shape to produce sustained rolling on sand, and informed design adaptations that mitigated the locomotion failures and improved robot speed by more than 200$\%$. Our results provide insights into how locomotors can utilize different morphological features to achieve robust rolling motion across deformable substrates.