 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLiPO: LiDAR Inertial Odometry for ICP Comparison
Oct 10, 2024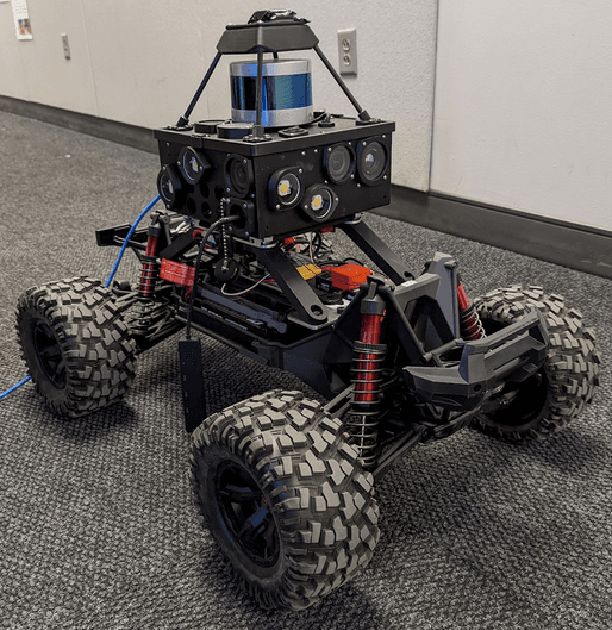
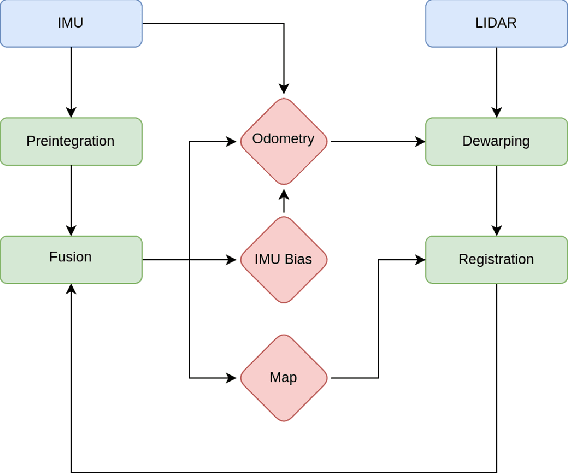
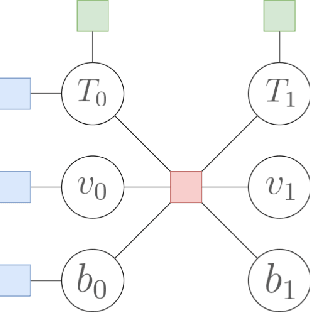
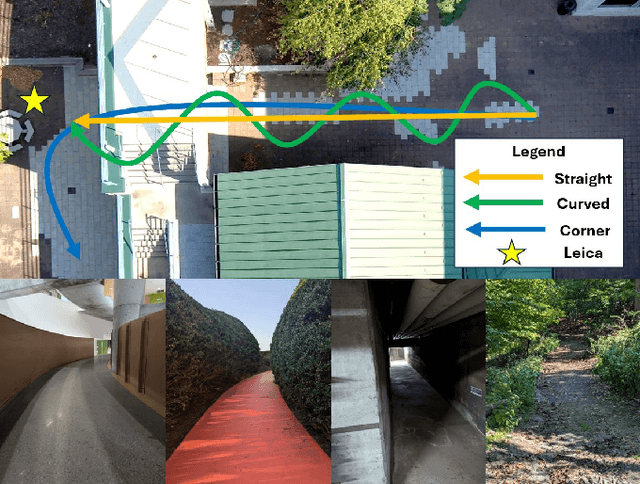
We introduce a LiDAR inertial odometry (LIO) framework, called LiPO, that enables direct comparisons of different iterative closest point (ICP) point cloud registration methods. The two common ICP methods we compare are point-to-point (P2P) and point-to-feature (P2F). In our experience, within the context of LIO, P2F-ICP results in less drift and improved mapping accuracy when robots move aggressively through challenging environments when compared to P2P-ICP. However, P2F-ICP methods require more hand-tuned hyper-parameters that make P2F-ICP less general across all environments and motions. In real-world field robotics applications where robots are used across different environments, more general P2P-ICP methods may be preferred despite increased drift. In this paper, we seek to better quantify the trade-off between P2P-ICP and P2F-ICP to help inform when each method should be used. To explore this trade-off, we use LiPO to directly compare ICP methods and test on relevant benchmark datasets as well as on our custom unpiloted ground vehicle (UGV). We find that overall, P2F-ICP has reduced drift and improved mapping accuracy, but, P2P-ICP is more consistent across all environments and motions with minimal drift increase.
A review on locomotion robophysics: the study of movement at the intersection of robotics, soft matter and dynamical systems
Feb 12, 2016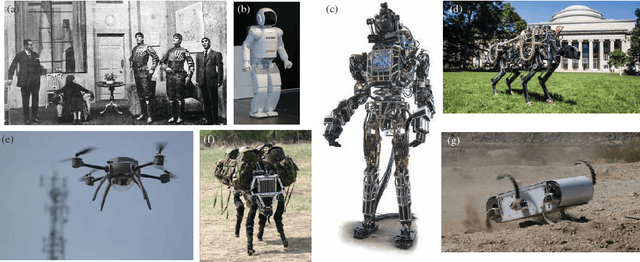
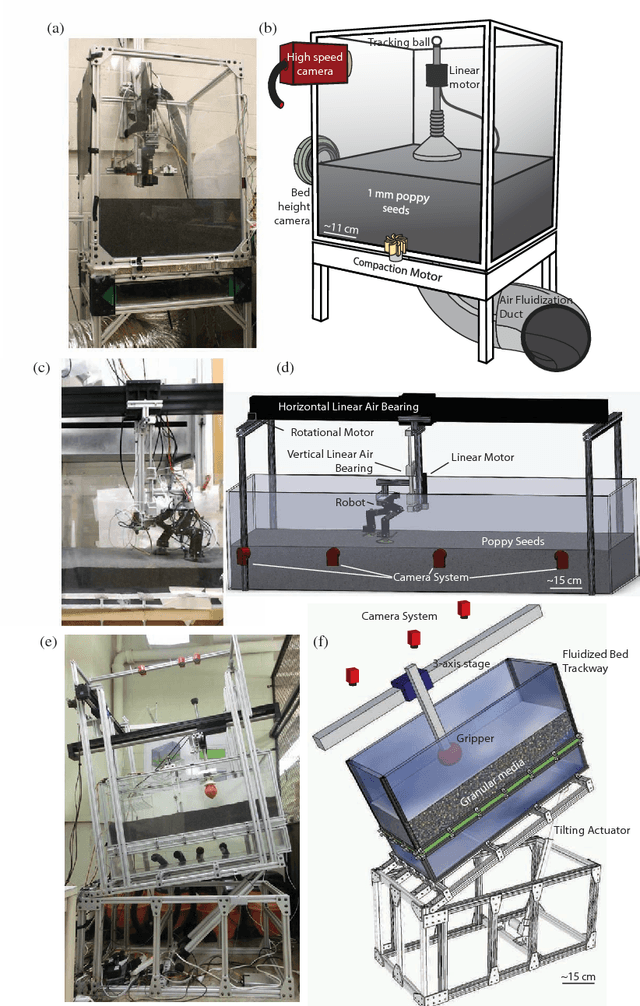
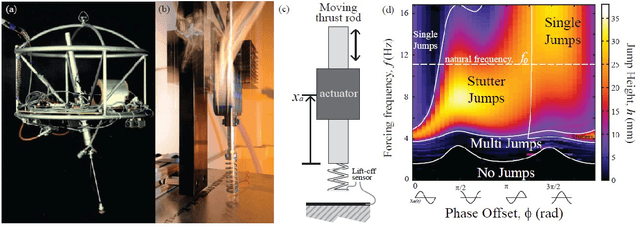
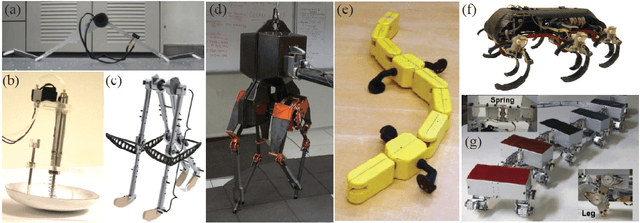
In this review we argue for the creation of a physics of moving systems -- a locomotion "robophysics" -- which we define as the pursuit of the discovery of principles of self generated motion. Robophysics can provide an important intellectual complement to the discipline of robotics, largely the domain of researchers from engineering and computer science. The essential idea is that we must complement study of complex robots in complex situations with systematic study of simplified robophysical devices in controlled laboratory settings and simplified theoretical models. We must thus use the methods of physics to examine successful and failed locomotion in simplified (abstracted) devices using parameter space exploration, systematic control, and techniques from dynamical systems. Using examples from our and other's research, we will discuss how such robophysical studies have begun to aid engineers in the creation of devices that begin to achieve life-like locomotor abilities on and within complex environments, have inspired interesting physics questions in low dimensional dynamical systems, geometric mechanics and soft matter physics, and have been useful to develop models for biological locomotion in complex terrain. The rapidly decreasing cost of constructing sophisticated robot models with easy access to significant computational power bodes well for scientists and engineers to engage in a discipline which can readily integrate experiment, theory and computation.