 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLiPO: LiDAR Inertial Odometry for ICP Comparison
Oct 10, 2024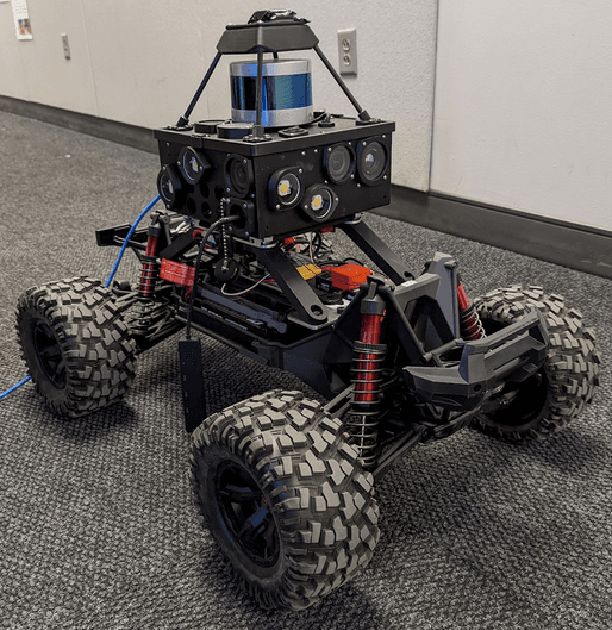
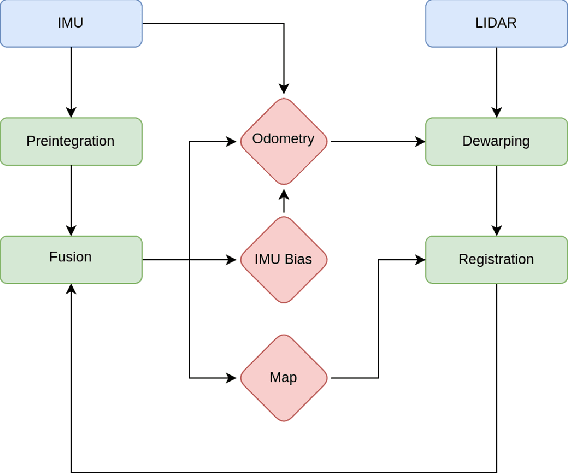
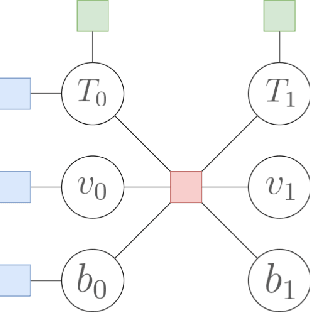
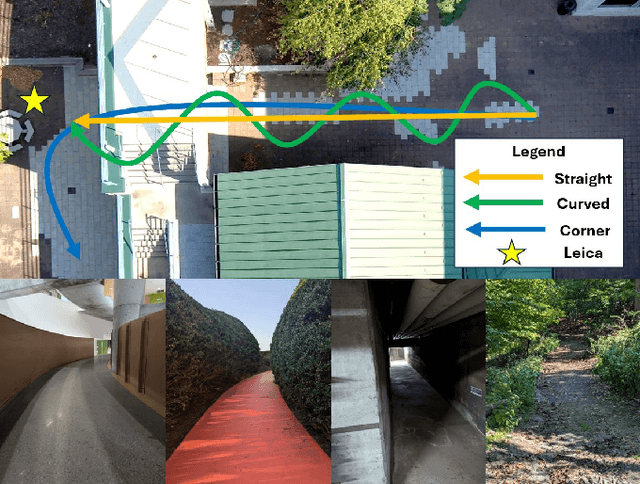
We introduce a LiDAR inertial odometry (LIO) framework, called LiPO, that enables direct comparisons of different iterative closest point (ICP) point cloud registration methods. The two common ICP methods we compare are point-to-point (P2P) and point-to-feature (P2F). In our experience, within the context of LIO, P2F-ICP results in less drift and improved mapping accuracy when robots move aggressively through challenging environments when compared to P2P-ICP. However, P2F-ICP methods require more hand-tuned hyper-parameters that make P2F-ICP less general across all environments and motions. In real-world field robotics applications where robots are used across different environments, more general P2P-ICP methods may be preferred despite increased drift. In this paper, we seek to better quantify the trade-off between P2P-ICP and P2F-ICP to help inform when each method should be used. To explore this trade-off, we use LiPO to directly compare ICP methods and test on relevant benchmark datasets as well as on our custom unpiloted ground vehicle (UGV). We find that overall, P2F-ICP has reduced drift and improved mapping accuracy, but, P2P-ICP is more consistent across all environments and motions with minimal drift increase.
Robotics During a Pandemic: The 2020 NSF CPS Virtual Challenge -- SoilScope, Mars Edition
Mar 15, 2021
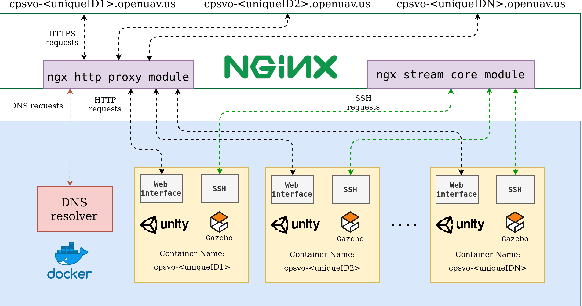


Remote sample recovery is a rapidly evolving application of Small Unmanned Aircraft Systems (sUAS) for planetary sciences and space exploration. Development of cyber-physical systems (CPS) for autonomous deployment and recovery of sensor probes for sample caching is already in progress with NASA's MARS 2020 mission. To challenge student teams to develop autonomy for sample recovery settings, the 2020 NSF CPS Challenge was positioned around the launch of the MARS 2020 rover and sUAS duo. This paper discusses perception and trajectory planning for sample recovery by sUAS in a simulation environment. Out of a total of five teams that participated, the results of the top two teams have been discussed. The OpenUAV cloud simulation framework deployed on the Cyber-Physical Systems Virtual Organization (CPS-VO) allowed the teams to work remotely over a month during the COVID-19 pandemic to develop and simulate autonomous exploration algorithms. Remote simulation enabled teams across the globe to collaborate in experiments. The two teams approached the task of probe search, probe recovery, and landing on a moving target differently. This paper is a summary of teams' insights and lessons learned, as they chose from a wide range of perception sensors and algorithms.