 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotics During a Pandemic: The 2020 NSF CPS Virtual Challenge -- SoilScope, Mars Edition
Mar 15, 2021
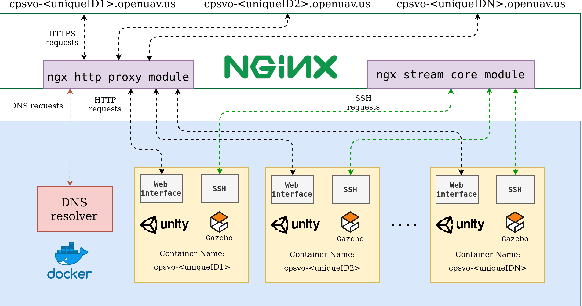


Remote sample recovery is a rapidly evolving application of Small Unmanned Aircraft Systems (sUAS) for planetary sciences and space exploration. Development of cyber-physical systems (CPS) for autonomous deployment and recovery of sensor probes for sample caching is already in progress with NASA's MARS 2020 mission. To challenge student teams to develop autonomy for sample recovery settings, the 2020 NSF CPS Challenge was positioned around the launch of the MARS 2020 rover and sUAS duo. This paper discusses perception and trajectory planning for sample recovery by sUAS in a simulation environment. Out of a total of five teams that participated, the results of the top two teams have been discussed. The OpenUAV cloud simulation framework deployed on the Cyber-Physical Systems Virtual Organization (CPS-VO) allowed the teams to work remotely over a month during the COVID-19 pandemic to develop and simulate autonomous exploration algorithms. Remote simulation enabled teams across the globe to collaborate in experiments. The two teams approached the task of probe search, probe recovery, and landing on a moving target differently. This paper is a summary of teams' insights and lessons learned, as they chose from a wide range of perception sensors and algorithms.