 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEngineering Mythology: A Digital-Physical Framework for Culturally-Inspired Public Art
Mar 29, 2026Navagunjara Reborn: The Phoenix of Odisha was built for Burning Man 2025 as both a sculpture and an experiment-a fusion of myth, craft, and computation. This paper describes the digital-physical workflow developed for the project: a pipeline that linked digital sculpting, distributed fabrication by artisans in Odisha (India), modular structural optimization in the U.S., iterative feedback through photogrammetry and digital twins, and finally, one-shot full assembly at the art site in Black Rock Desert, Nevada. The desert installation tested not just materials, but also systems of collaboration: between artisans and engineers, between myth and technology, between cultural specificity and global experimentation. We share the lessons learned in design, fabrication, and deployment and offer a framework for future interdisciplinary projects at the intersection of cultural heritage, STEAM education, and public art. In retrospect, this workflow can be read as a convergence of many knowledge systems-artisan practice, structural engineering, mythic narrative, and environmental constraint-rather than as execution of a single fixed blueprint.
Robotics During a Pandemic: The 2020 NSF CPS Virtual Challenge -- SoilScope, Mars Edition
Mar 15, 2021


Remote sample recovery is a rapidly evolving application of Small Unmanned Aircraft Systems (sUAS) for planetary sciences and space exploration. Development of cyber-physical systems (CPS) for autonomous deployment and recovery of sensor probes for sample caching is already in progress with NASA's MARS 2020 mission. To challenge student teams to develop autonomy for sample recovery settings, the 2020 NSF CPS Challenge was positioned around the launch of the MARS 2020 rover and sUAS duo. This paper discusses perception and trajectory planning for sample recovery by sUAS in a simulation environment. Out of a total of five teams that participated, the results of the top two teams have been discussed. The OpenUAV cloud simulation framework deployed on the Cyber-Physical Systems Virtual Organization (CPS-VO) allowed the teams to work remotely over a month during the COVID-19 pandemic to develop and simulate autonomous exploration algorithms. Remote simulation enabled teams across the globe to collaborate in experiments. The two teams approached the task of probe search, probe recovery, and landing on a moving target differently. This paper is a summary of teams' insights and lessons learned, as they chose from a wide range of perception sensors and algorithms.
The OpenUAV Swarm Simulation Testbed: a Collaborative DesignStudio for Field Robotics
Oct 02, 2019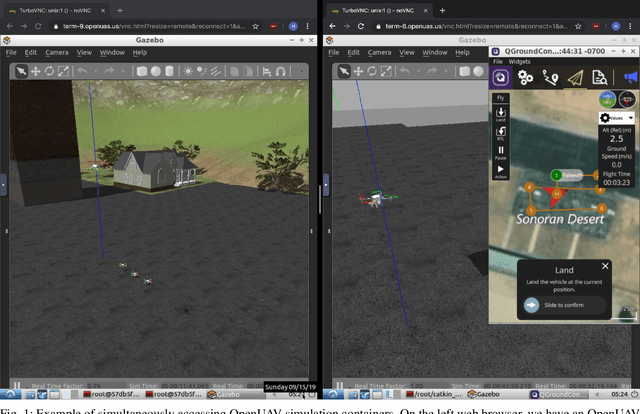
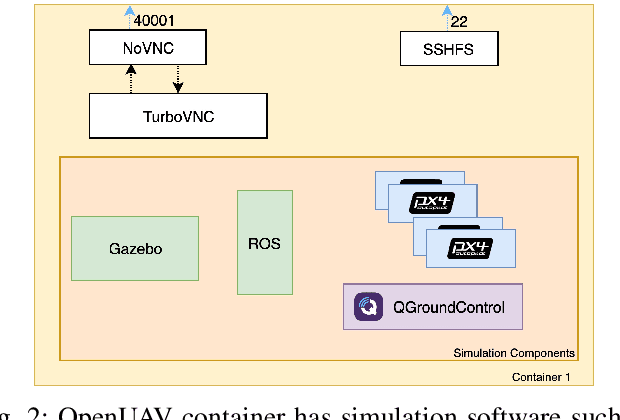
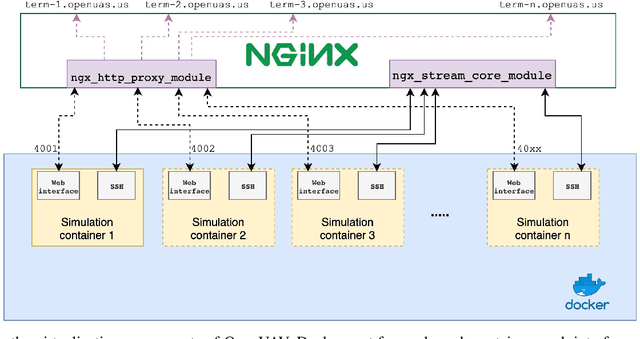
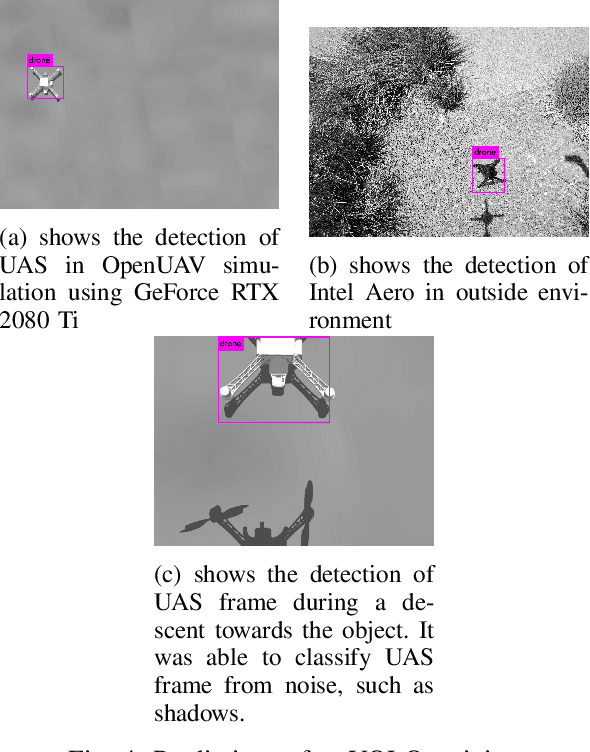
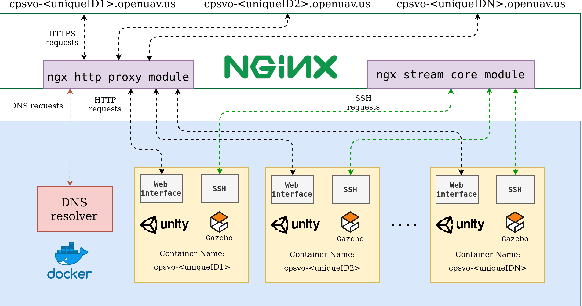
In this paper, we showcase a multi-robot design studio where simulation containers are browser accessible Lubuntu desktops. Our simulation testbed, based on ROS, Gazebo, PX4 flight stack has been developed to tackle higher-level challenging tasks such as mission planning, vision-based problems, collision avoidance, and multi-robot coordination for Unpiloted Aircraft Systems (UAS). The novel architecture is built around TurboVNC and noVNC WebSockets technology, to seamlessly provide real-time web performance for 3D rendering in a collaborative design tool. We have built upon our previous work that leveraged concurrent multi-UAS simulations, and extended it to be useful for underwater, airship and ground vehicles. This opens up the possibility for both rigorous Monte Carlo styled software testing of heterogeneous swarm simulations, as well as sampling-based optimization of mission parameters. The new OpenUAV architecture has native support for ROS, PX4 and QGroundControl. Two case studies in the paper illustrate the development of UAS missions in the latest OpenUAV setup. The first example highlights the development of a visual-servoing technique for UAS descent on a target. Second case study referred to as terrain relative navigation (TRN) involves creating a reactive planner for UAS navigation by keeping a constant distance from the terrain.
Geomorphological Analysis Using Unpiloted Aircraft Systems, Structure from Motion, and Deep Learning
Sep 27, 2019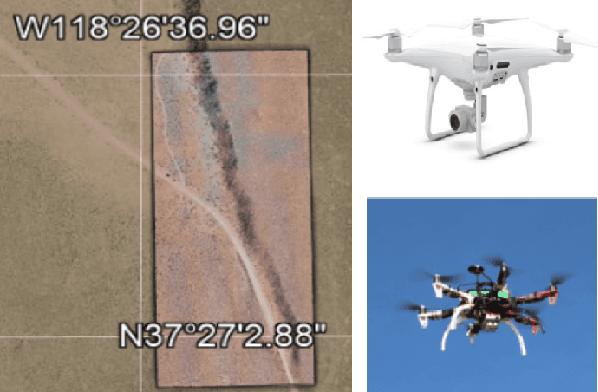
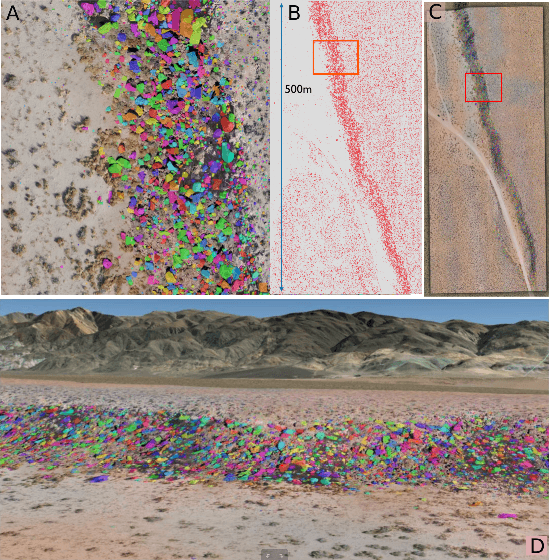

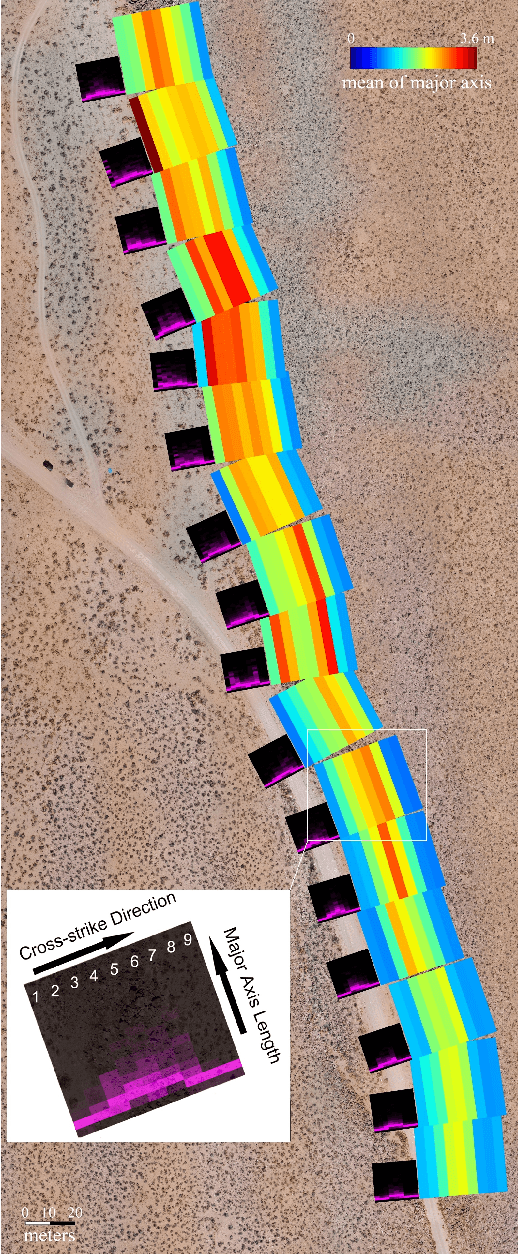
We present a pipeline for geomorphological analysis that uses structure from motion (SfM) and deep learning on close-range aerial imagery to estimate spatial distributions of rock traits (diameter and orientation), along a tectonic fault scarp. Unpiloted aircraft systems (UAS) have enabled acquisition of high-resolution imagery at close range, revolutionizing domains such as infrastructure inspection, precision agriculture, and disaster response. Our pipeline leverages UAS-based imagery to help scientists gain a better understanding of surface processes. Our pipeline uses SfM on aerial imagery to produce a georeferenced orthomosaic with 2 cm/pixel resolution. A human expert annotates rocks on a set of image tiles sampled from the orthomosaic, and these annotations are used to train a deep neural network to detect and segment individual rocks in the whole site. Our pipeline, in effect, automatically extracts semantic information (rock boundaries) on large volumes of unlabeled high-resolution aerial imagery, and subsequent structural analysis and shape descriptors result in estimates of rock diameter and orientation. We present results of our analysis on imagery collected along a fault scarp in the Volcanic Tablelands in eastern California. Although presented in the context of geology, our pipeline can be extended to a variety of morphological analysis tasks in other domains.