 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShakebot: A Low-cost, Open-source Shake Table for Ground Motion Seismic Studies
Dec 21, 2022Our earlier research built a virtual shake robot in simulation to study the dynamics of precariously balanced rocks (PBR), which are negative indicators of earthquakes in nature. The simulation studies need validation through physical experiments. For this purpose, we developed Shakebot, a low-cost (under $2,000), open-source shake table to validate simulations of PBR dynamics and facilitate other ground motion experiments. The Shakebot is a custom one-dimensional prismatic robotic system with perception and motion software developed using the Robot Operating System (ROS). We adapted affordable and high-accuracy components from 3D printers, particularly a closed-loop stepper motor for actuation and a toothed belt for transmission. The stepper motor enables the bed to reach a maximum horizontal acceleration of 11.8 m/s^2 (1.2 g), and velocity of 0.5 m/s, when loaded with a 2 kg scale-model PBR. The perception system of the Shakebot consists of an accelerometer and a high frame-rate camera. By fusing camera-based displacements with acceleration measurements, the Shakebot is able to carry out accurate bed velocity estimation. The ROS-based perception and motion software simplifies the transition of code from our previous virtual shake robot to the physical Shakebot. The reuse of the control programs ensures that the implemented ground motions are consistent for both the simulation and physical experiments, which is critical to validate our simulation experiments.
Autonomous Robotic Mapping of Fragile Geologic Features
May 04, 2021



Robotic mapping is useful in scientific applications that involve surveying unstructured environments. This paper presents a target-oriented mapping system for sparsely distributed geologic surface features, such as precariously balanced rocks (PBRs), whose geometric fragility parameters can provide valuable information on earthquake shaking history and landscape development for a region. With this geomorphology problem as the test domain, we demonstrate a pipeline for detecting, localizing, and precisely mapping fragile geologic features distributed on a landscape. To do so, we first carry out a lawn-mower search pattern in the survey region from a high elevation using an Unpiloted Aerial Vehicle (UAV). Once a potential PBR target is detected by a deep neural network, we track the bounding box in the image frames using a real-time tracking algorithm. The location and occupancy of the target in world coordinates are estimated using a sampling-based filtering algorithm, where a set of 3D points are re-sampled after weighting by the tracked bounding boxes from different camera perspectives. The converged 3D points provide a prior on 3D bounding shape of a target, which is used for UAV path planning to closely and completely map the target with Simultaneous Localization and Mapping (SLAM). After target mapping, the UAV resumes the lawn-mower search pattern to find the next target. We introduce techniques to make the target mapping robust to false positive and missing detection from the neural network. Our target-oriented mapping system has the advantages of reducing map storage and emphasizing complete visible surface features on specified targets.
Localization and Mapping of Sparse Geologic Features with Unpiloted Aircraft Systems
Jul 02, 2020

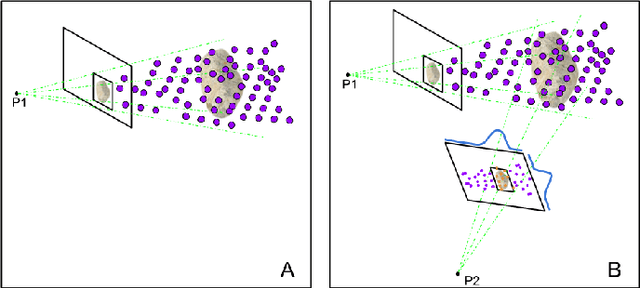
Robotic mapping is attractive in many science applications that involve environmental surveys. This paper presents a system for localization and mapping of sparsely distributed surface features such as precariously balanced rocks (PBRs), whose geometric fragility (stability) parameters provide valuable information on earthquake processes. With geomorphology as the test domain, we carry out a lawnmower search pattern using an Unpiloted Aerial Vehicle (UAV) equipped with a GPS module, stereo camera, and onboard computers. Once a target is detected by a deep neural network, we track its bounding box in the image coordinates by applying a Kalman filter that fuses the deep learning detection with KLT tracking. The target is localized in world coordinates using depth filtering where a set of 3D points are filtered by object bounding boxes from different camera perspectives. The 3D points also provide a strong prior on target shape, which is used for UAV path planning to accurately map the target using RGBD SLAM. After target mapping, the UAS resumes the lawnmower search pattern to locate the next target. Our end goal is a real-time mapping methodology for sparsely distributed surface features on earth or on extraterrestrial surfaces.
The OpenUAV Swarm Simulation Testbed: a Collaborative DesignStudio for Field Robotics
Oct 02, 2019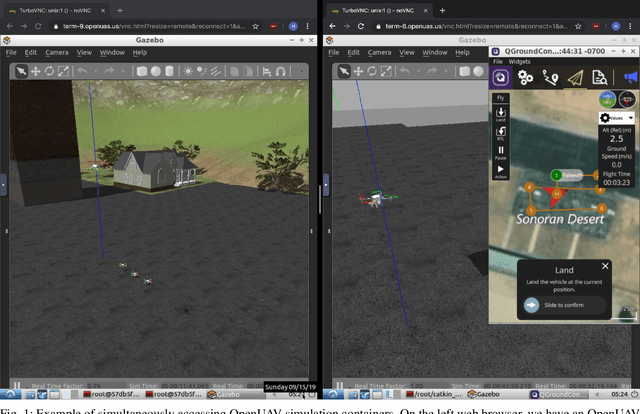
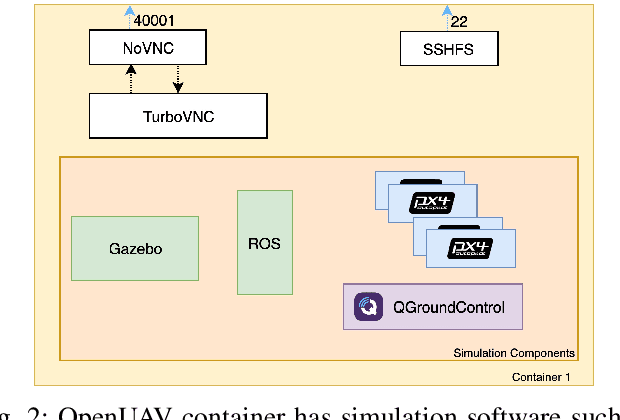
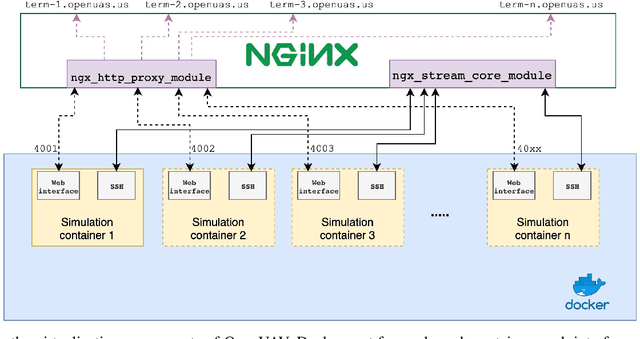
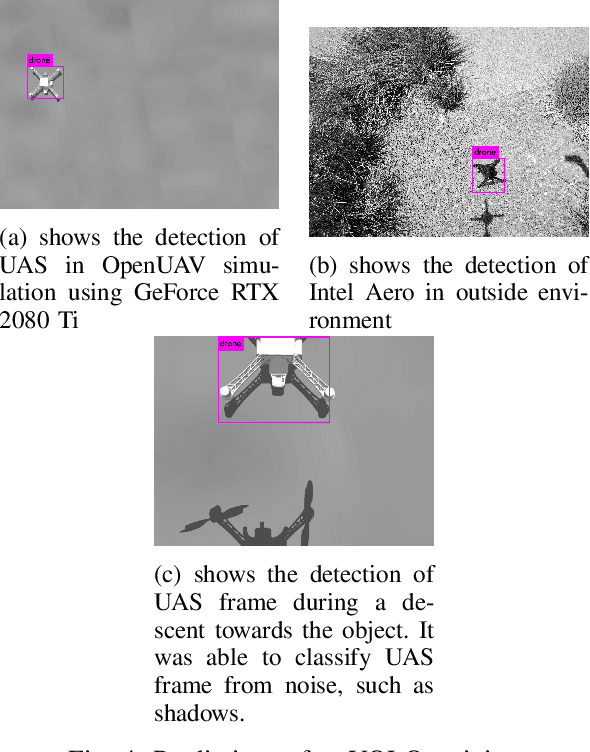
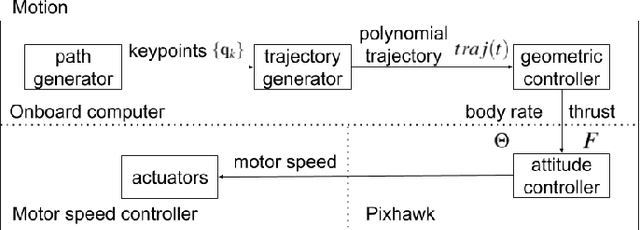
In this paper, we showcase a multi-robot design studio where simulation containers are browser accessible Lubuntu desktops. Our simulation testbed, based on ROS, Gazebo, PX4 flight stack has been developed to tackle higher-level challenging tasks such as mission planning, vision-based problems, collision avoidance, and multi-robot coordination for Unpiloted Aircraft Systems (UAS). The novel architecture is built around TurboVNC and noVNC WebSockets technology, to seamlessly provide real-time web performance for 3D rendering in a collaborative design tool. We have built upon our previous work that leveraged concurrent multi-UAS simulations, and extended it to be useful for underwater, airship and ground vehicles. This opens up the possibility for both rigorous Monte Carlo styled software testing of heterogeneous swarm simulations, as well as sampling-based optimization of mission parameters. The new OpenUAV architecture has native support for ROS, PX4 and QGroundControl. Two case studies in the paper illustrate the development of UAS missions in the latest OpenUAV setup. The first example highlights the development of a visual-servoing technique for UAS descent on a target. Second case study referred to as terrain relative navigation (TRN) involves creating a reactive planner for UAS navigation by keeping a constant distance from the terrain.
Geomorphological Analysis Using Unpiloted Aircraft Systems, Structure from Motion, and Deep Learning
Sep 27, 2019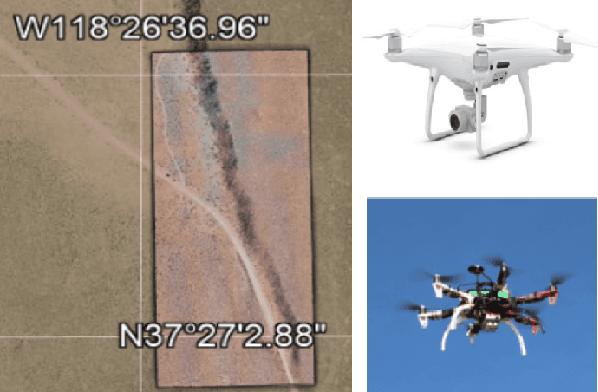
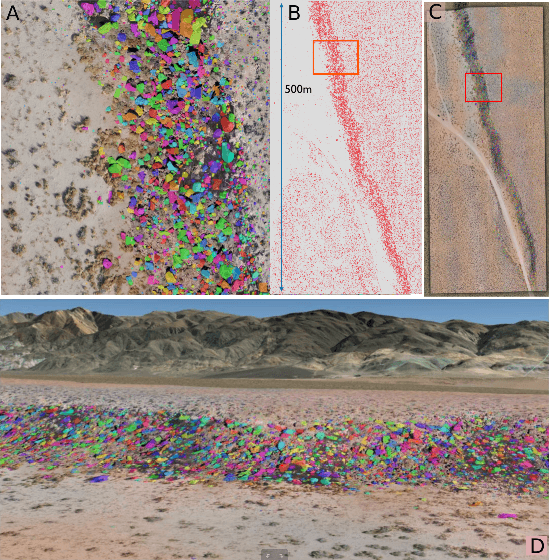

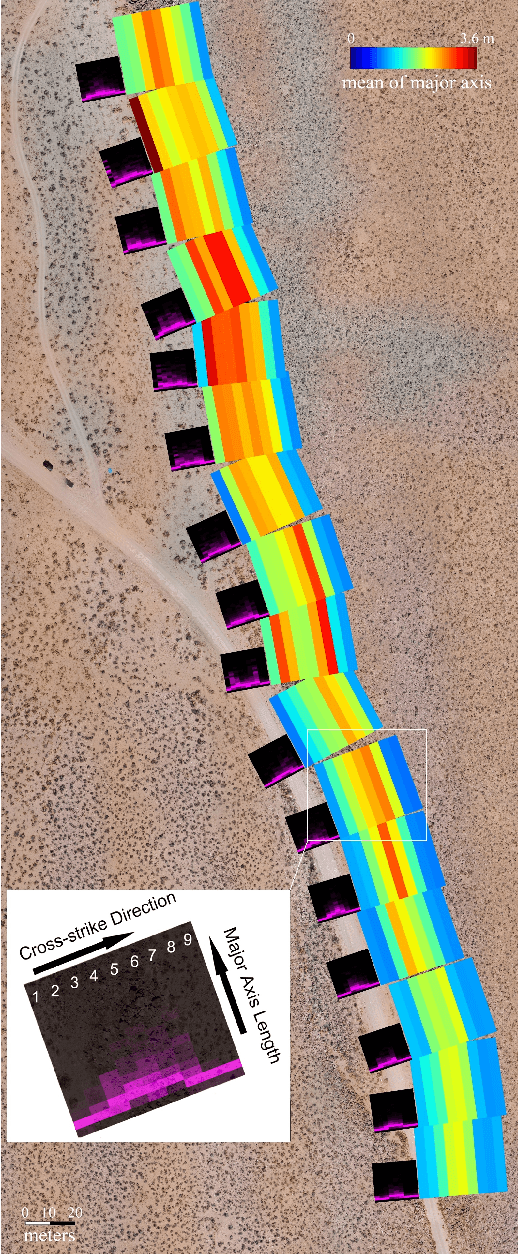
We present a pipeline for geomorphological analysis that uses structure from motion (SfM) and deep learning on close-range aerial imagery to estimate spatial distributions of rock traits (diameter and orientation), along a tectonic fault scarp. Unpiloted aircraft systems (UAS) have enabled acquisition of high-resolution imagery at close range, revolutionizing domains such as infrastructure inspection, precision agriculture, and disaster response. Our pipeline leverages UAS-based imagery to help scientists gain a better understanding of surface processes. Our pipeline uses SfM on aerial imagery to produce a georeferenced orthomosaic with 2 cm/pixel resolution. A human expert annotates rocks on a set of image tiles sampled from the orthomosaic, and these annotations are used to train a deep neural network to detect and segment individual rocks in the whole site. Our pipeline, in effect, automatically extracts semantic information (rock boundaries) on large volumes of unlabeled high-resolution aerial imagery, and subsequent structural analysis and shape descriptors result in estimates of rock diameter and orientation. We present results of our analysis on imagery collected along a fault scarp in the Volcanic Tablelands in eastern California. Although presented in the context of geology, our pipeline can be extended to a variety of morphological analysis tasks in other domains.