 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe OpenUAV Swarm Simulation Testbed: a Collaborative DesignStudio for Field Robotics
Paper and Code
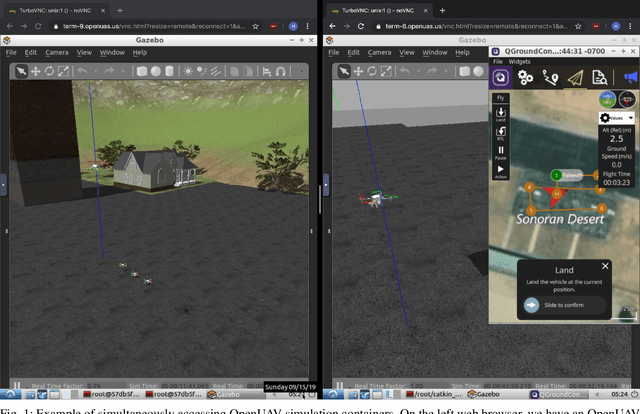
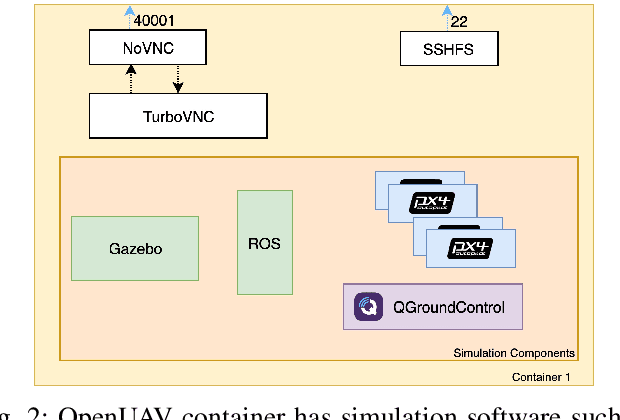
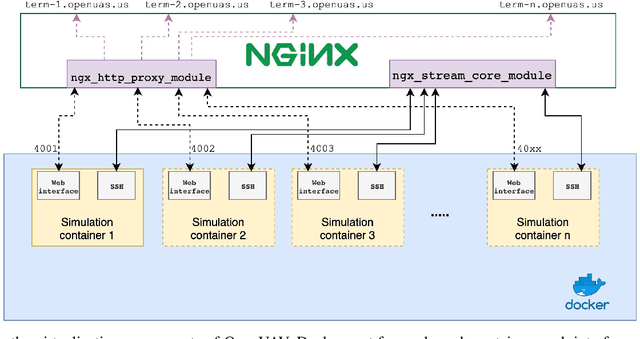
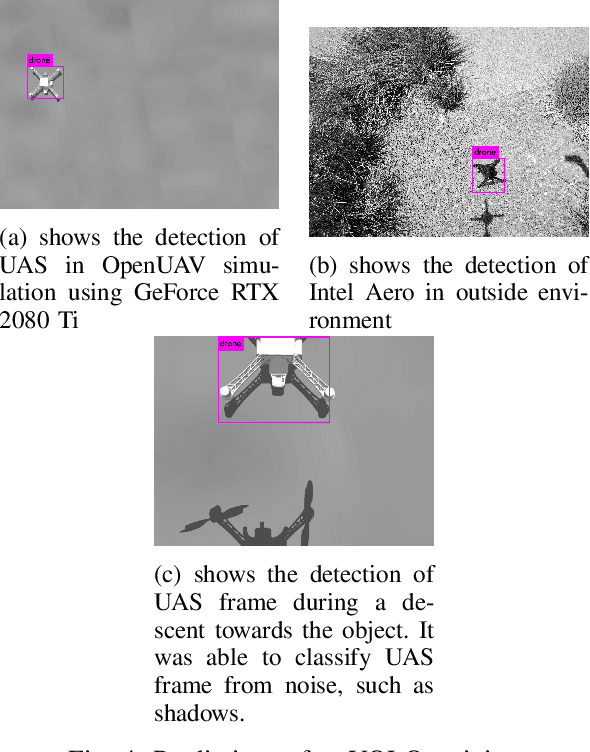
In this paper, we showcase a multi-robot design studio where simulation containers are browser accessible Lubuntu desktops. Our simulation testbed, based on ROS, Gazebo, PX4 flight stack has been developed to tackle higher-level challenging tasks such as mission planning, vision-based problems, collision avoidance, and multi-robot coordination for Unpiloted Aircraft Systems (UAS). The novel architecture is built around TurboVNC and noVNC WebSockets technology, to seamlessly provide real-time web performance for 3D rendering in a collaborative design tool. We have built upon our previous work that leveraged concurrent multi-UAS simulations, and extended it to be useful for underwater, airship and ground vehicles. This opens up the possibility for both rigorous Monte Carlo styled software testing of heterogeneous swarm simulations, as well as sampling-based optimization of mission parameters. The new OpenUAV architecture has native support for ROS, PX4 and QGroundControl. Two case studies in the paper illustrate the development of UAS missions in the latest OpenUAV setup. The first example highlights the development of a visual-servoing technique for UAS descent on a target. Second case study referred to as terrain relative navigation (TRN) involves creating a reactive planner for UAS navigation by keeping a constant distance from the terrain.