 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe dynamics of scattering in undulatory active collisions
Jun 11, 2018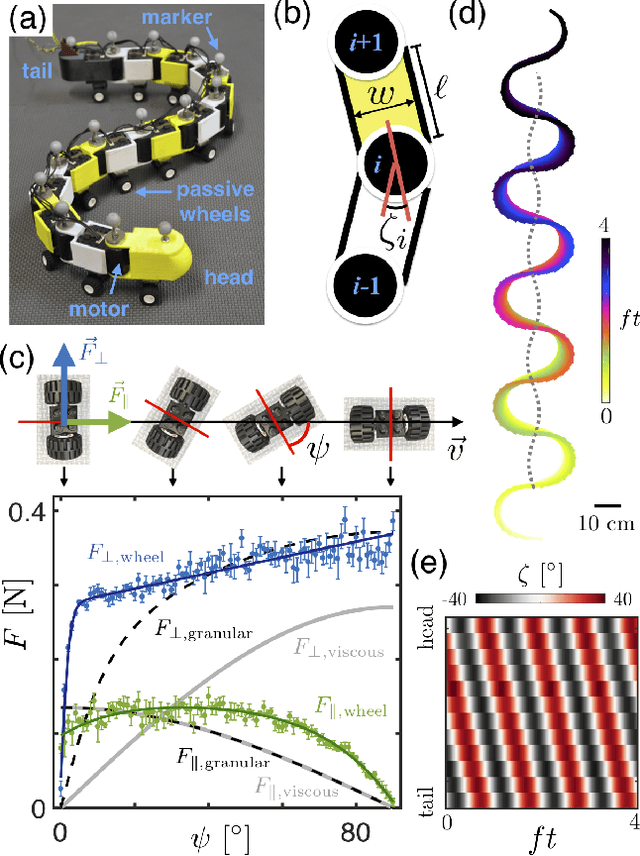
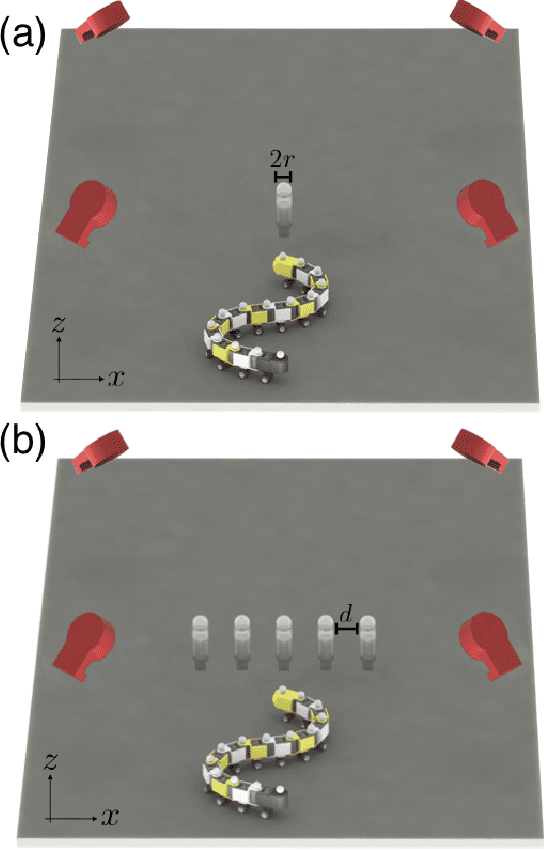
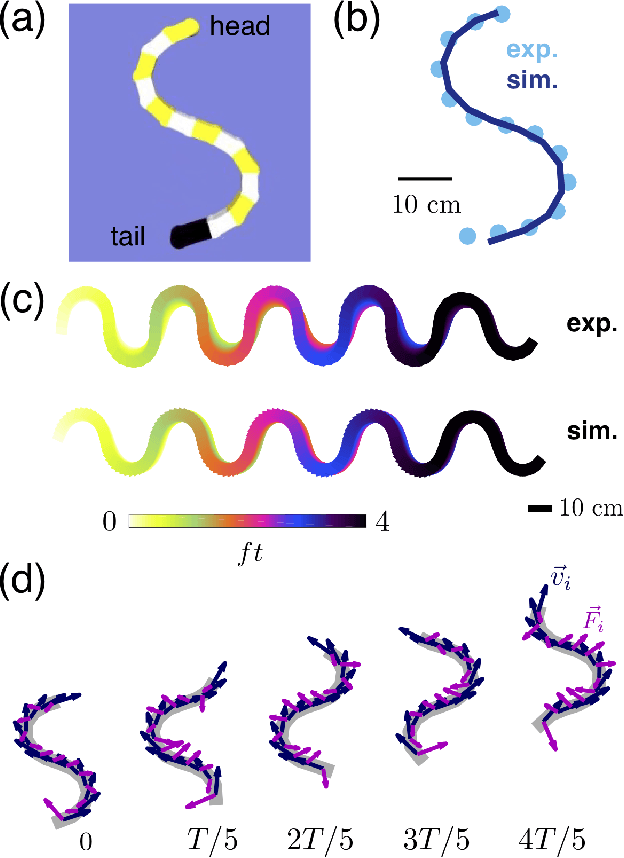
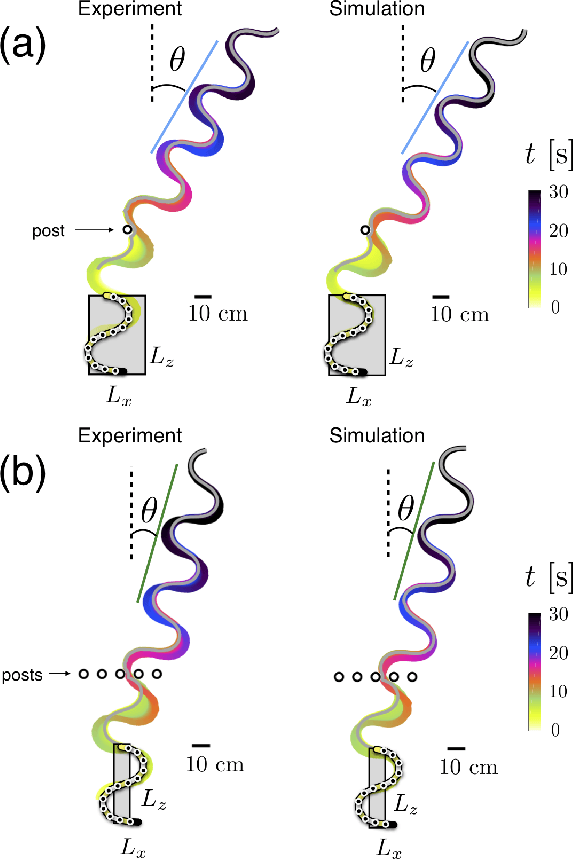
Natural and artificial self-propelled systems must manage environmental interactions during movement. Such interactions, which we refer to as active collisions, are fundamentally different from momentum-conserving interactions studied in classical physics, largely because the internal driving of the locomotor can lead to persistent contact with heterogeneities. Here, we experimentally and numerically study the effects of active collisions on a laterally-undulating sensory-deprived robophysical model, whose dynamics are applicable to self-propelled systems across length scales and environments. The robot moves via spatial undulation of body segments, with a nearly-linear center-of-geometry trajectory. Interactions with a single rigid post scatter the robot, and these deflections are proportional to the head-post contact duration. The distribution of scattering angles is smooth and strongly-peaked directly behind the post. Interactions with a single row of evenly-spaced posts (with inter-post spacing $d$) produce distributions reminiscent of far-field diffraction patterns: as $d$ decreases, distinct secondary peaks emerge as large deflections become more likely. Surprisingly, we find that the presence of multiple posts does not change the nature of individual collisions; instead, multi-modal scattering patterns arise from multiple posts altering the likelihood of individual collisions to occur. As $d$ decreases, collisions near the leading edges of the posts become more probable, and we find that these interactions are associated with larger deflections. Our results, which highlight the surprising dynamics that can occur during active collisions of self-propelled systems, can inform control principles for locomotors in complex terrain and facilitate design of task-capable active matter.
* 32 pages, 20 main figures, 8 supplemental figures