 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGranular Loco-Manipulation: Repositioning Rocks Through Strategic Sand Avalanche
May 19, 2025Legged robots have the potential to leverage obstacles to climb steep sand slopes. However, efficiently repositioning these obstacles to desired locations is challenging. Here we present DiffusiveGRAIN, a learning-based method that enables a multi-legged robot to strategically induce localized sand avalanches during locomotion and indirectly manipulate obstacles. We conducted 375 trials, systematically varying obstacle spacing, robot orientation, and leg actions in 75 of them. Results show that the movement of closely-spaced obstacles exhibits significant interference, requiring joint modeling. In addition, different multi-leg excavation actions could cause distinct robot state changes, necessitating integrated planning of manipulation and locomotion. To address these challenges, DiffusiveGRAIN includes a diffusion-based environment predictor to capture multi-obstacle movements under granular flow interferences and a robot state predictor to estimate changes in robot state from multi-leg action patterns. Deployment experiments (90 trials) demonstrate that by integrating the environment and robot state predictors, the robot can autonomously plan its movements based on loco-manipulation goals, successfully shifting closely located rocks to desired locations in over 65% of trials. Our study showcases the potential for a locomoting robot to strategically manipulate obstacles to achieve improved mobility on challenging terrains.
Multi-robot connection towards collective obstacle field traversal
Sep 18, 2024
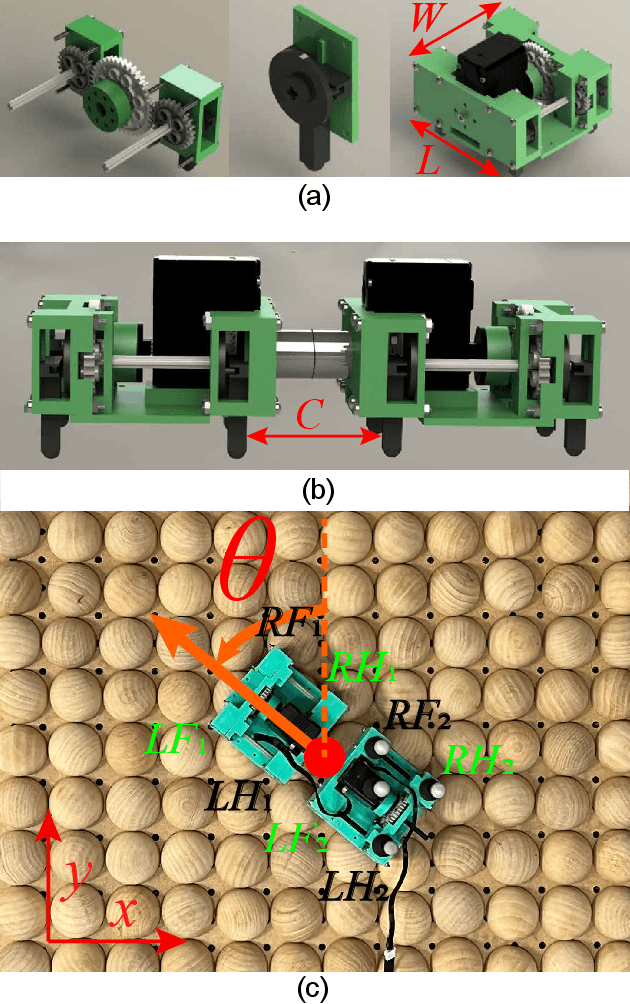
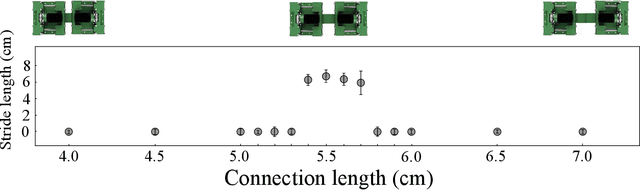
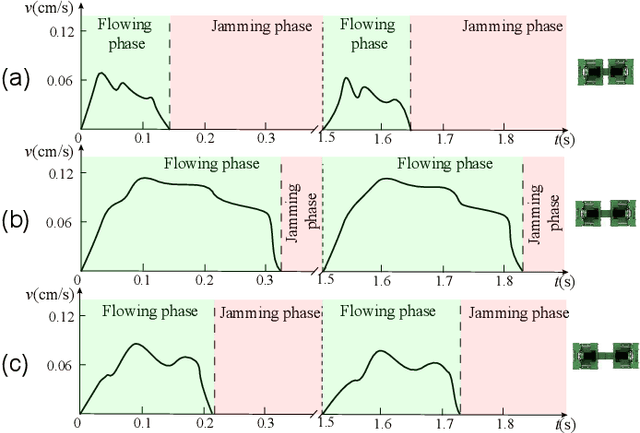
Environments with large terrain height variations present great challenges for legged robot locomotion. Drawing inspiration from fire ants' collective assembly behavior, we study strategies that can enable two ``connectable'' robots to collectively navigate over bumpy terrains with height variations larger than robot leg length. Each robot was designed to be extremely simple, with a cubical body and one rotary motor actuating four vertical peg legs that move in pairs. Two or more robots could physically connect to one another to enhance collective mobility. We performed locomotion experiments with a two-robot group, across an obstacle field filled with uniformly-distributed semi-spherical ``boulders''. Experimentally-measured robot speed suggested that the connection length between the robots has a significant effect on collective mobility: connection length C in [0.86, 0.9] robot unit body length (UBL) were able to produce sustainable movements across the obstacle field, whereas connection length C in [0.63, 0.84] and [0.92, 1.1] UBL resulted in low traversability. An energy landscape based model revealed the underlying mechanism of how connection length modulated collective mobility through the system's potential energy landscape, and informed adaptation strategies for the two-robot system to adapt their connection length for traversing obstacle fields with varying spatial frequencies. Our results demonstrated that by varying the connection configuration between the robots, the two-robot system could leverage mechanical intelligence to better utilize obstacle interaction forces and produce improved locomotion. Going forward, we envision that generalized principles of robot-environment coupling can inform design and control strategies for a large group of small robots to achieve ant-like collective environment negotiation.
Learning Granular Media Avalanche Behavior for Indirectly Manipulating Obstacles on a Granular Slope
Jul 02, 2024Legged robot locomotion on sand slopes is challenging due to the complex dynamics of granular media and how the lack of solid surfaces can hinder locomotion. A promising strategy, inspired by ghost crabs and other organisms in nature, is to strategically interact with rocks, debris, and other obstacles to facilitate movement. To provide legged robots with this ability, we present a novel approach that leverages avalanche dynamics to indirectly manipulate objects on a granular slope. We use a Vision Transformer (ViT) to process image representations of granular dynamics and robot excavation actions. The ViT predicts object movement, which we use to determine which leg excavation action to execute. We collect training data from 100 real physical trials and, at test time, deploy our trained model in novel settings. Experimental results suggest that our model can accurately predict object movements and achieve a success rate $\geq 80\%$ in a variety of manipulation tasks with up to four obstacles, and can also generalize to objects with different physics properties. To our knowledge, this is the first paper to leverage granular media avalanche dynamics to indirectly manipulate objects on granular slopes. Supplementary material is available at https://sites.google.com/view/grain-corl2024/home.