 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHRI-SA: A Multimodal Dataset for Online Assessment of Human Situational Awareness during Remote Human-Robot Teaming
Mar 18, 2026Maintaining situational awareness (SA) is critical in human-robot teams. Yet, under high workload and dynamic conditions, operators often experience SA gaps. Automated detection of SA gaps could provide timely assistance for operators. However, conventional SA measures either disrupt task flow or cannot capture real-time fluctuations, limiting their operational utility. To the best of our knowledge, no publicly available dataset currently supports the systematic evaluation of online human SA assessment in human-robot teaming. To advance the development of online SA assessment tools, we introduce HRI-SA, a multimodal dataset from 30 participants in a realistic search-and-rescue human-robot teaming context, incorporating eye movements, pupil diameter, biosignals, user interactions, and robot data. The experimental protocol included predefined events requiring timely operator assistance, with ground truth SA latency of two types (perceptual and comprehension) systematically obtained by measuring the time between assistance need onset and resolution. We illustrate the utility of this dataset by evaluating standard machine learning models for detecting perceptual SA latencies using generic eye-tracking features and contextual features. Results show that eye-tracking features alone effectively classified perceptual SA latency (recall=88.91%, F1=67.63%) using leave-one-group-out cross-validation, with performance improved through contextual data fusion (recall=91.51%, F1=80.38%). This paper contributes the first public dataset supporting the systematic evaluation of SA throughout a human-robot teaming mission, while also demonstrating the potential of generic eye-tracking features for continuous perceptual SA latency detection in remote human-robot teaming.
A Service Robot's Guide to Interacting with Busy Customers
Dec 19, 2025The growing use of service robots in hospitality highlights the need to understand how to effectively communicate with pre-occupied customers. This study investigates the efficacy of commonly used communication modalities by service robots, namely, acoustic/speech, visual display, and micromotion gestures in capturing attention and communicating intention with a user in a simulated restaurant scenario. We conducted a two-part user study (N=24) using a Temi robot to simulate delivery tasks, with participants engaged in a typing game (MonkeyType) to emulate a state of busyness. The participants' engagement in the typing game is measured by words per minute (WPM) and typing accuracy. In Part 1, we compared non-verbal acoustic cue versus baseline conditions to assess attention capture during a single-cup delivery task. In Part 2, we evaluated the effectiveness of speech, visual display, micromotion and their multimodal combination in conveying specific intentions (correct cup selection) during a two-cup delivery task. The results indicate that, while speech is highly effective in capturing attention, it is less successful in clearly communicating intention. Participants rated visual as the most effective modality for intention clarity, followed by speech, with micromotion being the lowest ranked.These findings provide insights into optimizing communication strategies for service robots, highlighting the distinct roles of attention capture and intention communication in enhancing user experience in dynamic hospitality settings.
* Presented at ACRA 2025. 10 pages, 4 figures. Includes a user study (N=24) using the Temi robot evaluating speech, visual, and micromotion modalities
Collaborative Object Handover in a Robot Crafting Assistant
Feb 27, 2025



Robots are increasingly working alongside people, delivering food to patrons in restaurants or helping workers on assembly lines. These scenarios often involve object handovers between the person and the robot. To achieve safe and efficient human-robot collaboration (HRC), it is important to incorporate human context in a robot's handover strategies. Therefore, in this work, we develop a collaborative handover model trained on human teleoperation data collected in a naturalistic crafting task. To evaluate the performance of this model, we conduct cross-validation experiments on the training dataset as well as a user study in the same HRC crafting task. The handover episodes and user perceptions of the autonomous handover policy were compared with those of the human teleoperated handovers. While the cross-validation experiment and user study indicate that the autonomous policy successfully achieved collaborative handovers, the comparison with human teleoperation revealed avenues for further improvements.
Consistency Matters: Defining Demonstration Data Quality Metrics in Robot Learning from Demonstration
Dec 18, 2024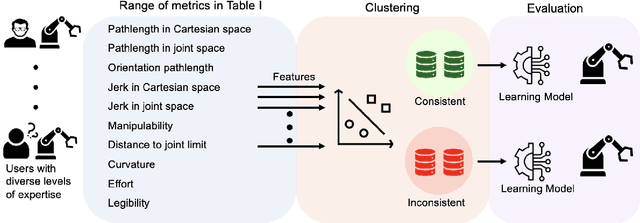
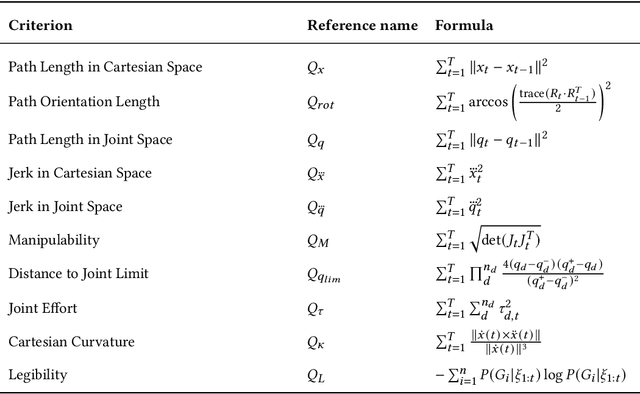

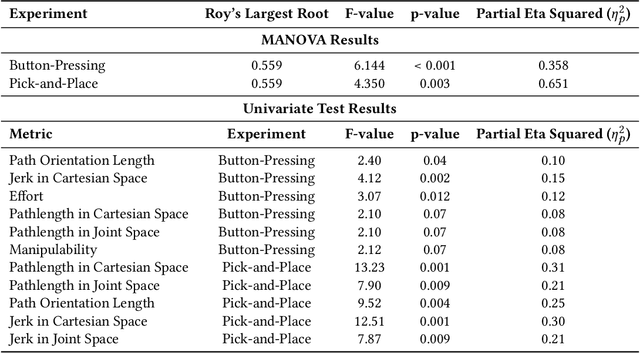
Learning from Demonstration (LfD) empowers robots to acquire new skills through human demonstrations, making it feasible for everyday users to teach robots. However, the success of learning and generalization heavily depends on the quality of these demonstrations. Consistency is often used to indicate quality in LfD, yet the factors that define this consistency remain underexplored. In this paper, we evaluate a comprehensive set of motion data characteristics to determine which consistency measures best predict learning performance. By ensuring demonstration consistency prior to training, we enhance models' predictive accuracy and generalization to novel scenarios. We validate our approach with two user studies involving participants with diverse levels of robotics expertise. In the first study (N = 24), users taught a PR2 robot to perform a button-pressing task in a constrained environment, while in the second study (N = 30), participants trained a UR5 robot on a pick-and-place task. Results show that demonstration consistency significantly impacts success rates in both learning and generalization, with 70% and 89% of task success rates in the two studies predicted using our consistency metrics. Moreover, our metrics estimate generalized performance success rates with 76% and 91% accuracy. These findings suggest that our proposed measures provide an intuitive, practical way to assess demonstration data quality before training, without requiring expert data or algorithm-specific modifications. Our approach offers a systematic way to evaluate demonstration quality, addressing a critical gap in LfD by formalizing consistency metrics that enhance the reliability of robot learning from human demonstrations.
A Probabilistic Model for Skill Acquisition with Switching Latent Feedback Controllers
Oct 18, 2024



Manipulation tasks often consist of subtasks, each representing a distinct skill. Mastering these skills is essential for robots, as it enhances their autonomy, efficiency, adaptability, and ability to work in their environment. Learning from demonstrations allows robots to rapidly acquire new skills without starting from scratch, with demonstrations typically sequencing skills to achieve tasks. Behaviour cloning approaches to learning from demonstration commonly rely on mixture density network output heads to predict robot actions. In this work, we first reinterpret the mixture density network as a library of feedback controllers (or skills) conditioned on latent states. This arises from the observation that a one-layer linear network is functionally equivalent to a classical feedback controller, with network weights corresponding to controller gains. We use this insight to derive a probabilistic graphical model that combines these elements, describing the skill acquisition process as segmentation in a latent space, where each skill policy functions as a feedback control law in this latent space. Our approach significantly improves not only task success rate, but also robustness to observation noise when trained with human demonstrations. Our physical robot experiments further show that the induced robustness improves model deployment on robots.
Demonstration Based Explainable AI for Learning from Demonstration Methods
Oct 10, 2024Learning from Demonstration (LfD) is a powerful type of machine learning that can allow novices to teach and program robots to complete various tasks. However, the learning process for these systems may still be difficult for novices to interpret and understand, making effective teaching challenging. Explainable artificial intelligence (XAI) aims to address this challenge by explaining a system to the user. In this work, we investigate XAI within LfD by implementing an adaptive explanatory feedback system on an inverse reinforcement learning (IRL) algorithm. The feedback is implemented by demonstrating selected learnt trajectories to users. The system adapts to user teaching by categorizing and then selectively sampling trajectories shown to a user, to show a representative sample of both successful and unsuccessful trajectories. The system was evaluated through a user study with 26 participants teaching a robot a navigation task. The results of the user study demonstrated that the proposed explanatory feedback system can improve robot performance, teaching efficiency and user understanding of the robot.
Robots Have Been Seen and Not Heard: Effects of Consequential Sounds on Human-Perception of Robots
Jun 05, 2024



Many people expect robots to move fairly quietly, or make pleasant "beep boop" sounds or jingles similar to what they have observed in videos of robots. Unfortunately, this expectation of quietness does not match reality, as robots make machine sounds, known as 'consequential sounds', as they move and operate. As robots become more prevalent within society, understanding the sounds produced by robots and how these sounds are perceived by people is becoming increasingly important for positive human robot interactions (HRI). This paper investigates how people respond to the consequential sounds of robots, specifically how robots make a participant feel, how much they like the robot, would be distracted by the robot, and a person's desire to colocate with robots. Participants were shown 5 videos of different robots and asked their opinions on the robots and the sounds they made. This was compared with a control condition of completely silent videos. The results in this paper demonstrate with data from 182 participants (858 trials) that consequential sounds produced by robots have a significant negative effect on human perceptions of robots. Firstly there were increased negative 'associated affects' of the participants, such as making them feel more uncomfortable or agitated around the robot. Secondly, the presence of consequential sounds correlated with participants feeling more distracted and less able to focus. Thirdly participants reported being less likely to want to colocate in a shared environment with robots.
Learning to Communicate Functional States with Nonverbal Expressions for Improved Human-Robot Collaboration
Apr 30, 2024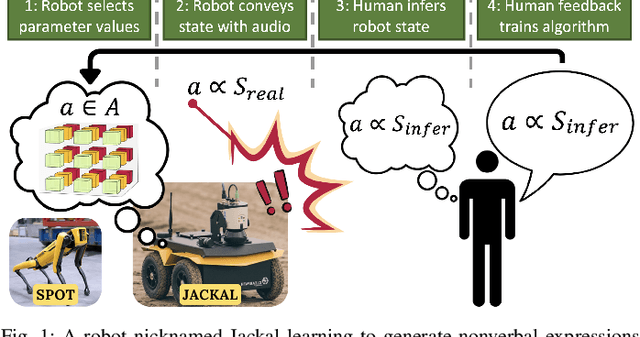
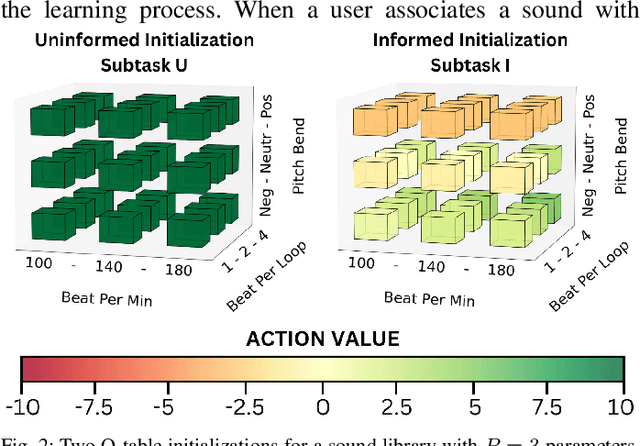
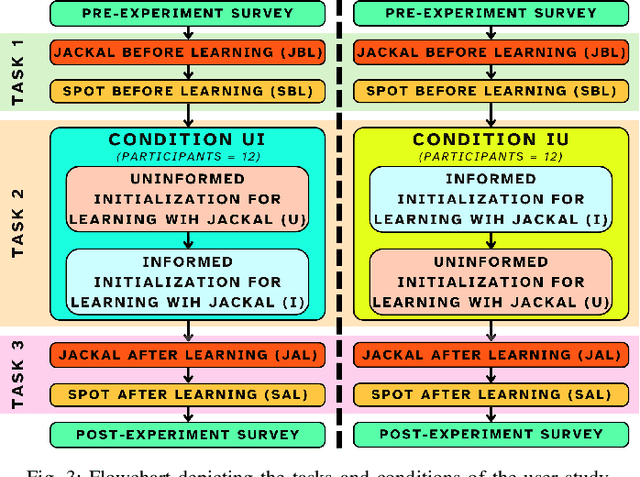
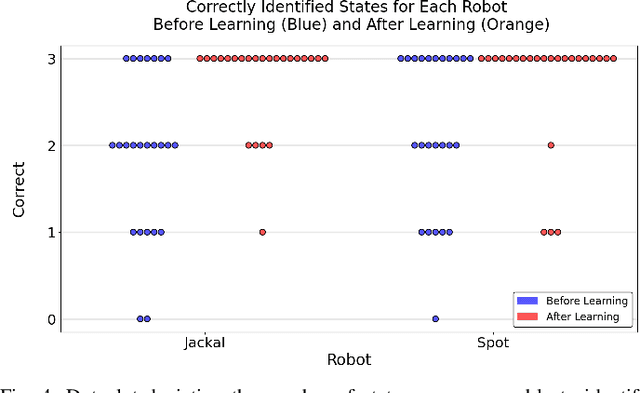
Collaborative robots must effectively communicate their internal state to humans to enable a smooth interaction. Nonverbal communication is widely used to communicate information during human-robot interaction, however, such methods may also be misunderstood, leading to communication errors. In this work, we explore modulating the acoustic parameter values (pitch bend, beats per minute, beats per loop) of nonverbal auditory expressions to convey functional robot states (accomplished, progressing, stuck). We propose a reinforcement learning (RL) algorithm based on noisy human feedback to produce accurately interpreted nonverbal auditory expressions. The proposed approach was evaluated through a user study with 24 participants. The results demonstrate that: 1. Our proposed RL-based approach is able to learn suitable acoustic parameter values which improve the users' ability to correctly identify the state of the robot. 2. Algorithm initialization informed by previous user data can be used to significantly speed up the learning process. 3. The method used for algorithm initialization strongly influences whether participants converge to similar sounds for each robot state. 4. Modulation of pitch bend has the largest influence on user association between sounds and robotic states.
* 8 Pages, Accepted to RA-L March 2024
Alternative Interfaces for Human-initiated Natural Language Communication and Robot-initiated Haptic Feedback: Towards Better Situational Awareness in Human-Robot Collaboration
Jan 25, 2024This article presents an implementation of a natural-language speech interface and a haptic feedback interface that enables a human supervisor to provide guidance to, request information, and receive status updates from a Spot robot. We provide insights gained during preliminary user testing of the interface in a realistic robot exploration scenario.
How Can Everyday Users Efficiently Teach Robots by Demonstrations?
Oct 19, 2023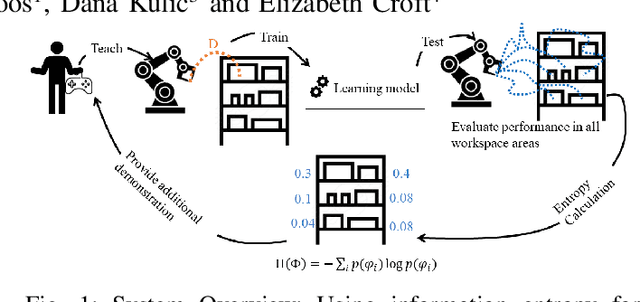
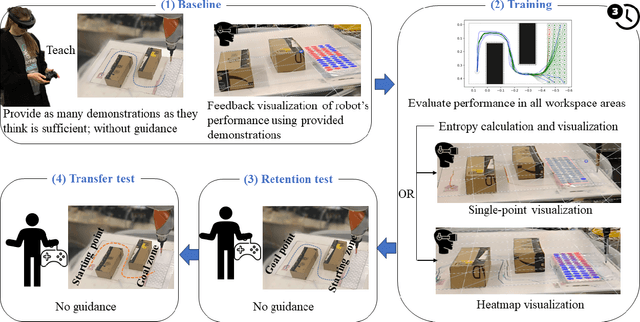
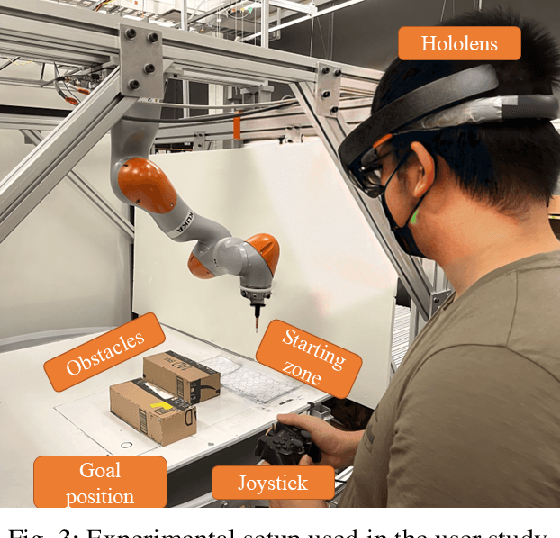
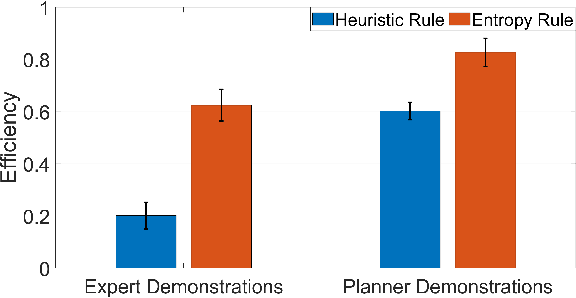
Learning from Demonstration (LfD) is a framework that allows lay users to easily program robots. However, the efficiency of robot learning and the robot's ability to generalize to task variations hinges upon the quality and quantity of the provided demonstrations. Our objective is to guide human teachers to furnish more effective demonstrations, thus facilitating efficient robot learning. To achieve this, we propose to use a measure of uncertainty, namely task-related information entropy, as a criterion for suggesting informative demonstration examples to human teachers to improve their teaching skills. In a conducted experiment (N=24), an augmented reality (AR)-based guidance system was employed to train novice users to produce additional demonstrations from areas with the highest entropy within the workspace. These novice users were trained for a few trials to teach the robot a generalizable task using a limited number of demonstrations. Subsequently, the users' performance after training was assessed first on the same task (retention) and then on a novel task (transfer) without guidance. The results indicated a substantial improvement in robot learning efficiency from the teacher's demonstrations, with an improvement of up to 198% observed on the novel task. Furthermore, the proposed approach was compared to a state-of-the-art heuristic rule and found to improve robot learning efficiency by 210% compared to the heuristic rule.