 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollaborative Object Handover in a Robot Crafting Assistant
Feb 27, 2025



Robots are increasingly working alongside people, delivering food to patrons in restaurants or helping workers on assembly lines. These scenarios often involve object handovers between the person and the robot. To achieve safe and efficient human-robot collaboration (HRC), it is important to incorporate human context in a robot's handover strategies. Therefore, in this work, we develop a collaborative handover model trained on human teleoperation data collected in a naturalistic crafting task. To evaluate the performance of this model, we conduct cross-validation experiments on the training dataset as well as a user study in the same HRC crafting task. The handover episodes and user perceptions of the autonomous handover policy were compared with those of the human teleoperated handovers. While the cross-validation experiment and user study indicate that the autonomous policy successfully achieved collaborative handovers, the comparison with human teleoperation revealed avenues for further improvements.
Natural Language Communication with a Teachable Agent
Mar 17, 2022

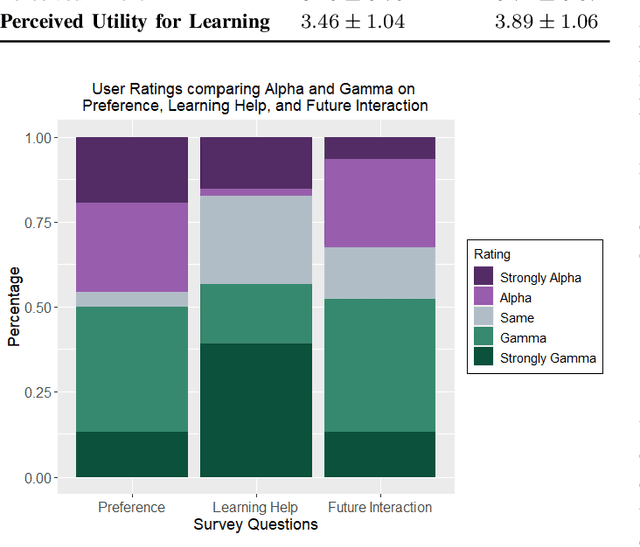
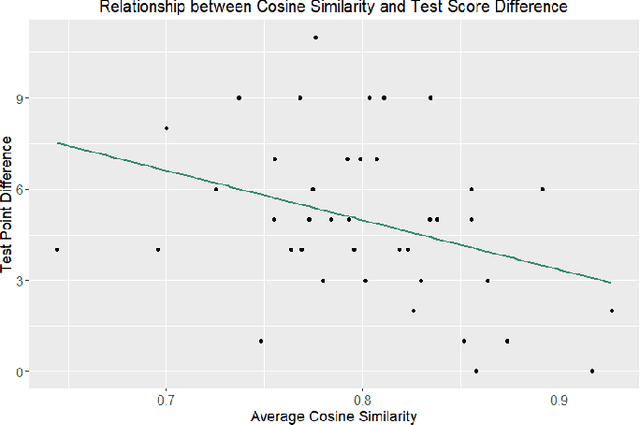
Conversational teachable agents offer a promising platform to support learning, both in the classroom and in remote settings. In this context, the agent takes the role of the novice, while the student takes on the role of teacher. This framing is significant for its ability to elicit the Prot\'eg\'e effect in the student-teacher, a pedagogical phenomenon known to increase engagement in the teaching task, and also improve cognitive outcomes. In prior work, teachable agents often take a passive role in the learning interaction, and there are few studies in which the agent and student engage in natural language dialogue during the teaching task. This work investigates the effect of teaching modality when interacting with a virtual agent, via the web-based teaching platform, the Curiosity Notebook. A method of teaching the agent by selecting sentences from source material is compared to a method paraphrasing the source material and typing text input to teach. A user study has been conducted to measure the effect teaching modality on the learning outcomes and engagement of the participants. The results indicate that teaching via paraphrasing and text input has a positive effect on learning outcomes for the material covered, and also on aspects of affective engagement. Furthermore, increased paraphrasing effort, as measured by the similarity between the source material and the material the teacher conveyed to the robot, improves learning outcomes for participants.