 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Best of Both Worlds: Combining Human and Machine Translations for Multilingual Semantic Parsing with Active Learning
May 22, 2023



Multilingual semantic parsing aims to leverage the knowledge from the high-resource languages to improve low-resource semantic parsing, yet commonly suffers from the data imbalance problem. Prior works propose to utilize the translations by either humans or machines to alleviate such issues. However, human translations are expensive, while machine translations are cheap but prone to error and bias. In this work, we propose an active learning approach that exploits the strengths of both human and machine translations by iteratively adding small batches of human translations into the machine-translated training set. Besides, we propose novel aggregated acquisition criteria that help our active learning method select utterances to be manually translated. Our experiments demonstrate that an ideal utterance selection can significantly reduce the error and bias in the translated data, resulting in higher parser accuracies than the parsers merely trained on the machine-translated data.
A Planning-Based Explainable Collaborative Dialogue System
Mar 02, 2023



Eva is a multimodal conversational system that helps users to accomplish their domain goals through collaborative dialogue. The system does this by inferring users' intentions and plans to achieve those goals, detects whether obstacles are present, finds plans to overcome them or to achieve higher-level goals, and plans its actions, including speech acts,to help users accomplish those goals. In doing so, the system maintains and reasons with its own beliefs, goals and intentions, and explicitly reasons about those of its user. Belief reasoning is accomplished with a modal Horn-clause meta-interpreter. The planning and reasoning subsystems obey the principles of persistent goals and intentions, including the formation and decomposition of intentions to perform complex actions, as well as the conditions under which they can be given up. In virtue of its planning process, the system treats its speech acts just like its other actions -- physical acts affect physical states, digital acts affect digital states, and speech acts affect mental and social states. This general approach enables Eva to plan a variety of speech acts including requests, informs, questions, confirmations, recommendations, offers, acceptances, greetings, and emotive expressions. Each of these has a formally specified semantics which is used during the planning and reasoning processes. Because it can keep track of different users' mental states, it can engage in multi-party dialogues. Importantly, Eva can explain its utterances because it has created a plan standing behind each of them. Finally, Eva employs multimodal input and output, driving an avatar that can perceive and employ facial and head movements along with emotive speech acts.
Natural Language Communication with a Teachable Agent
Mar 17, 2022

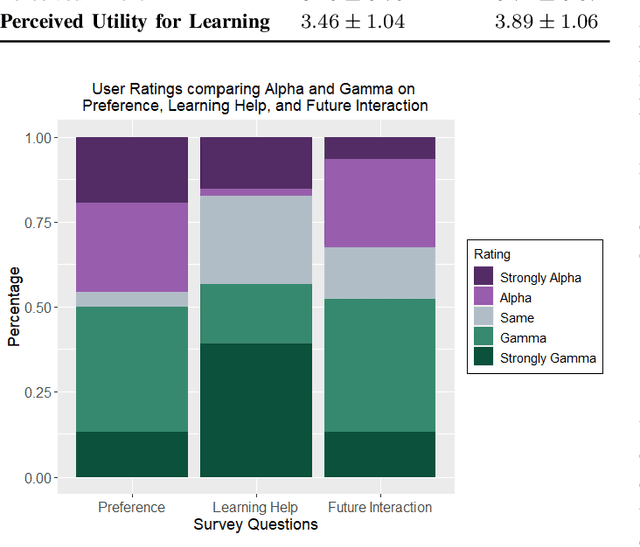
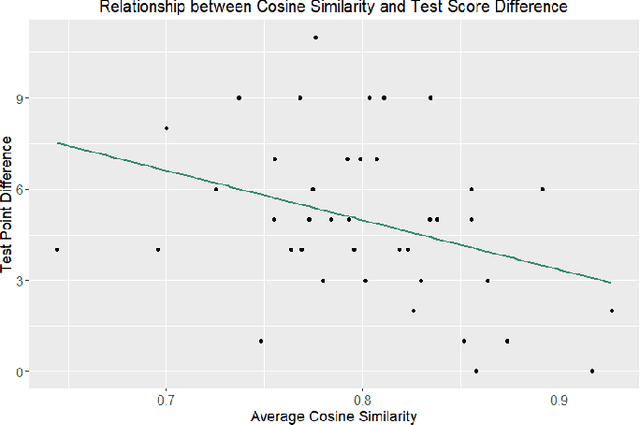
Conversational teachable agents offer a promising platform to support learning, both in the classroom and in remote settings. In this context, the agent takes the role of the novice, while the student takes on the role of teacher. This framing is significant for its ability to elicit the Prot\'eg\'e effect in the student-teacher, a pedagogical phenomenon known to increase engagement in the teaching task, and also improve cognitive outcomes. In prior work, teachable agents often take a passive role in the learning interaction, and there are few studies in which the agent and student engage in natural language dialogue during the teaching task. This work investigates the effect of teaching modality when interacting with a virtual agent, via the web-based teaching platform, the Curiosity Notebook. A method of teaching the agent by selecting sentences from source material is compared to a method paraphrasing the source material and typing text input to teach. A user study has been conducted to measure the effect teaching modality on the learning outcomes and engagement of the participants. The results indicate that teaching via paraphrasing and text input has a positive effect on learning outcomes for the material covered, and also on aspects of affective engagement. Furthermore, increased paraphrasing effort, as measured by the similarity between the source material and the material the teacher conveyed to the robot, improves learning outcomes for participants.