 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDissecting Subjectivity and the "Ground Truth" Illusion in Data Annotation
Feb 11, 2026In machine learning, "ground truth" refers to the assumed correct labels used to train and evaluate models. However, the foundational "ground truth" paradigm rests on a positivistic fallacy that treats human disagreement as technical noise rather than a vital sociotechnical signal. This systematic literature review analyzes research published between 2020 and 2025 across seven premier venues: ACL, AIES, CHI, CSCW, EAAMO, FAccT, and NeurIPS, investigating the mechanisms in data annotation practices that facilitate this "consensus trap". Our identification phase captured 30,897 records, which were refined via a tiered keyword filtration schema to a high-recall corpus of 3,042 records for manual screening, resulting in a final included corpus of 346 papers for qualitative synthesis. Our reflexive thematic analysis reveals that systemic failures in positional legibility, combined with the recent architectural shift toward human-as-verifier models, specifically the reliance on model-mediated annotations, introduce deep-seated anchoring bias and effectively remove human voices from the loop. We further demonstrate how geographic hegemony imposes Western norms as universal benchmarks, often enforced by the performative alignment of precarious data workers who prioritize requester compliance over honest subjectivity to avoid economic penalties. Critiquing the "noisy sensor" fallacy, where statistical models misdiagnose cultural pluralism as random error, we argue for reclaiming disagreement as a high-fidelity signal essential for building culturally competent models. To address these systemic tensions, we propose a roadmap for pluralistic annotation infrastructures that shift the objective from discovering a singular "right" answer to mapping the diversity of human experience.
Democratizing Reward Design for Personal and Representative Value-Alignment
Oct 29, 2024Aligning AI agents with human values is challenging due to diverse and subjective notions of values. Standard alignment methods often aggregate crowd feedback, which can result in the suppression of unique or minority preferences. We introduce Interactive-Reflective Dialogue Alignment, a method that iteratively engages users in reflecting on and specifying their subjective value definitions. This system learns individual value definitions through language-model-based preference elicitation and constructs personalized reward models that can be used to align AI behaviour. We evaluated our system through two studies with 30 participants, one focusing on "respect" and the other on ethical decision-making in autonomous vehicles. Our findings demonstrate diverse definitions of value-aligned behaviour and show that our system can accurately capture each person's unique understanding. This approach enables personalized alignment and can inform more representative and interpretable collective alignment strategies.
Natural Language Communication with a Teachable Agent
Mar 17, 2022

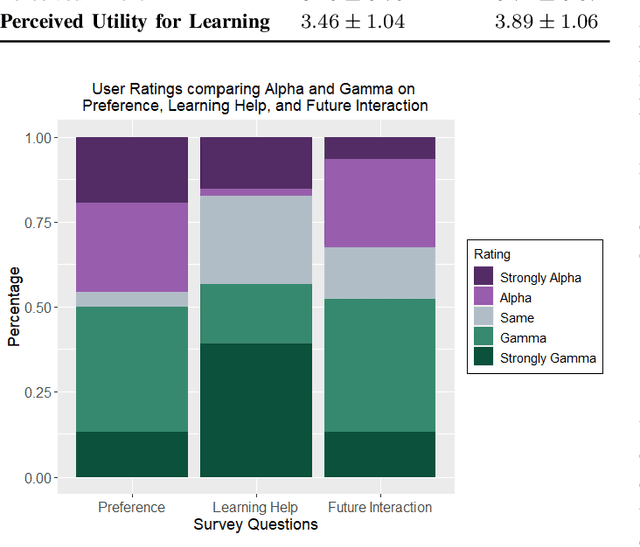
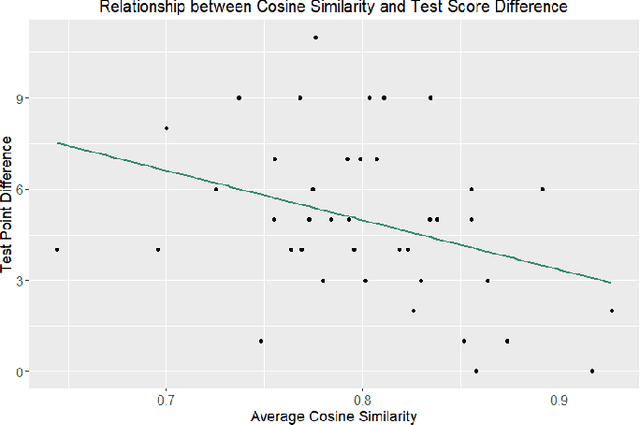
Conversational teachable agents offer a promising platform to support learning, both in the classroom and in remote settings. In this context, the agent takes the role of the novice, while the student takes on the role of teacher. This framing is significant for its ability to elicit the Prot\'eg\'e effect in the student-teacher, a pedagogical phenomenon known to increase engagement in the teaching task, and also improve cognitive outcomes. In prior work, teachable agents often take a passive role in the learning interaction, and there are few studies in which the agent and student engage in natural language dialogue during the teaching task. This work investigates the effect of teaching modality when interacting with a virtual agent, via the web-based teaching platform, the Curiosity Notebook. A method of teaching the agent by selecting sentences from source material is compared to a method paraphrasing the source material and typing text input to teach. A user study has been conducted to measure the effect teaching modality on the learning outcomes and engagement of the participants. The results indicate that teaching via paraphrasing and text input has a positive effect on learning outcomes for the material covered, and also on aspects of affective engagement. Furthermore, increased paraphrasing effort, as measured by the similarity between the source material and the material the teacher conveyed to the robot, improves learning outcomes for participants.
Identifying Functions and Behaviours of Social Robots during Learning Activities: Teachers' Perspective
Oct 30, 2021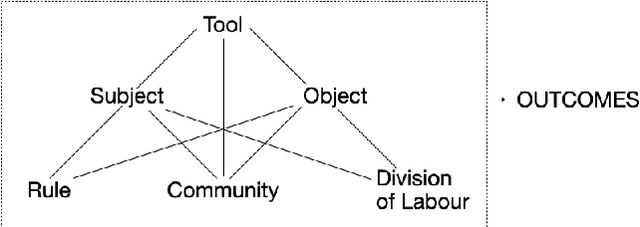
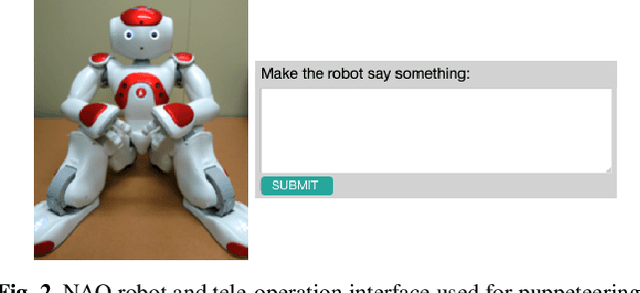

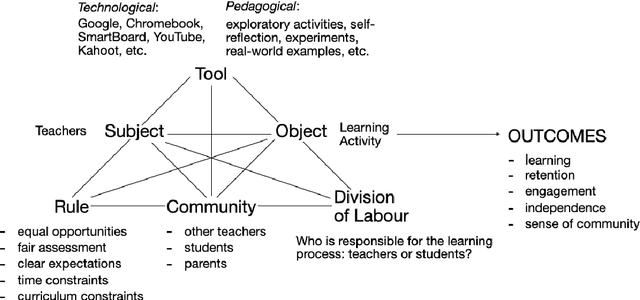
With advances in artificial intelligence, research is increasingly exploring the potential functions that social robots can play in education. As teachers are a critical stakeholder in the use and application of educational technologies, we conducted a study to understand teachers' perspectives on how a social robot could support a variety of learning activities in the classroom. Through interviews, robot puppeteering, and group brainstorming sessions with five elementary and middle school teachers from a local school in Canada, we take a socio-technical perspective to conceptualize possible robot functions and behaviours, and the effects they may have on the current way learning activities are designed, planned, and executed. Overall, the teachers responded positively to the idea of introducing a social robot as a technological tool for learning activities, envisioning differences in usage for teacher-robot and student-robot interactions. Further, Engestr\"om's Activity System Model -- a framework for analyzing human needs, tasks, and outcomes -- illustrated a number of tensions associated with learning activities in the classroom. We discuss the fine-grained robot functions and behaviours conceived by teachers, and how they address the current tensions -- providing suggestions for improving the design of social robots for learning activities.
Towards Teachable Conversational Agents
Feb 20, 2021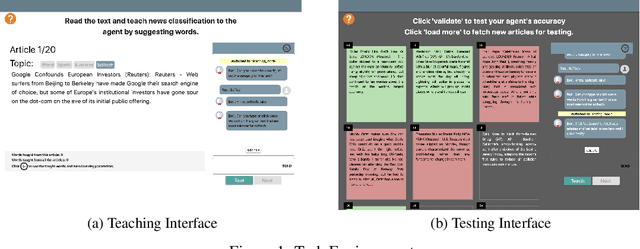
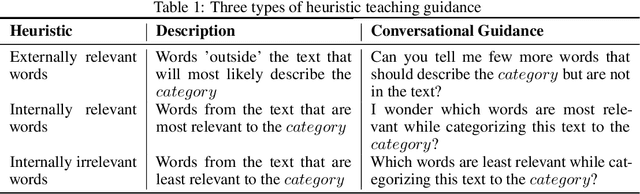
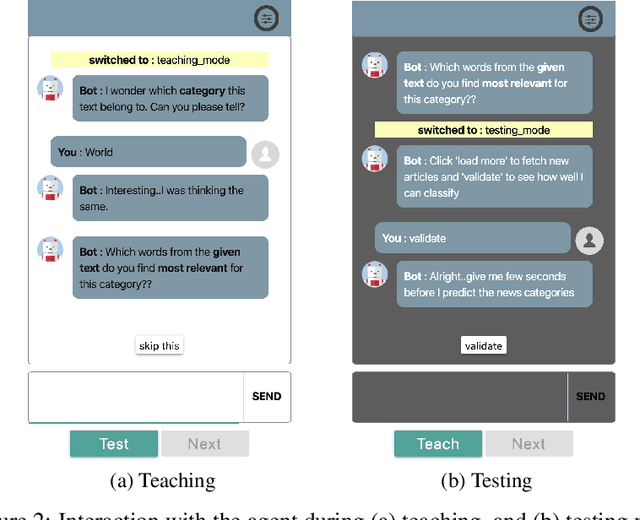
The traditional process of building interactive machine learning systems can be viewed as a teacher-learner interaction scenario where the machine-learners are trained by one or more human-teachers. In this work, we explore the idea of using a conversational interface to investigate the interaction between human-teachers and interactive machine-learners. Specifically, we examine whether teachable AI agents can reliably learn from human-teachers through conversational interactions, and how this learning compare with traditional supervised learning algorithms. Results validate the concept of teachable conversational agents and highlight the factors relevant for the development of machine learning systems that intend to learn from conversational interactions.
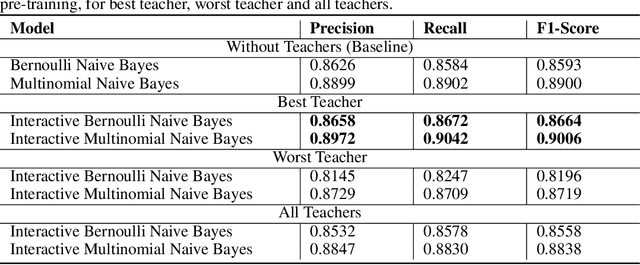
Autonomous Vehicle Visual Signals for Pedestrians: Experiments and Design Recommendations
Oct 10, 2020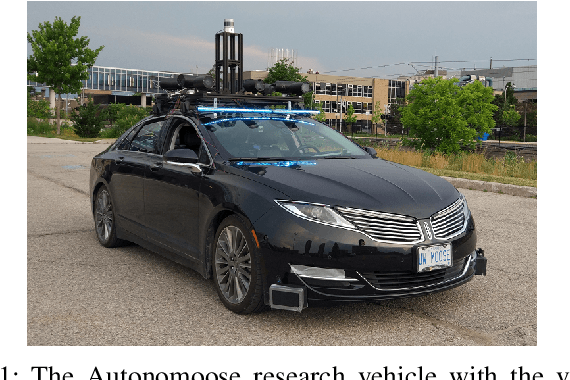
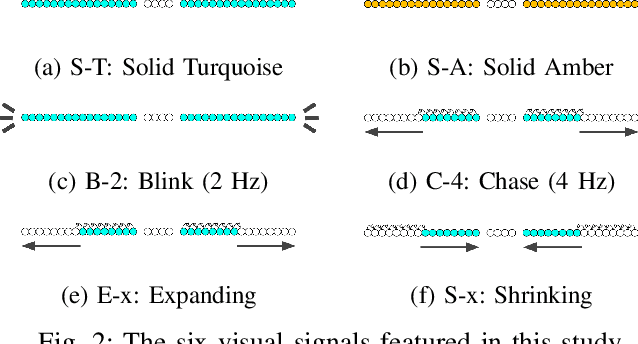
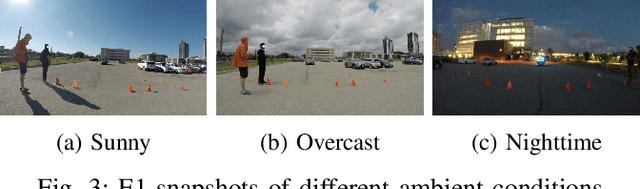
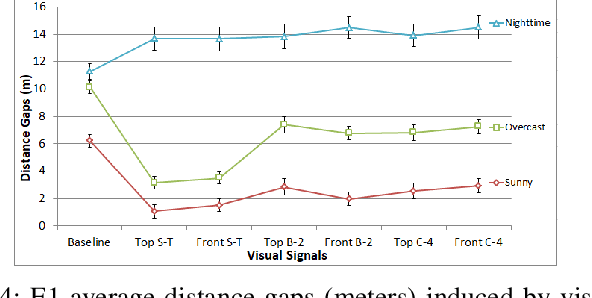
Autonomous Vehicles (AV) will transform transportation, but also the interaction between vehicles and pedestrians. In the absence of a driver, it is not clear how an AV can communicate its intention to pedestrians. One option is to use visual signals. To advance their design, we conduct four human-participant experiments and evaluate six representative AV visual signals for visibility, intuitiveness, persuasiveness, and usability at pedestrian crossings. Based on the results, we distill twelve practical design recommendations for AV visual signals, with focus on signal pattern design and placement. Moreover, the paper advances the methodology for experimental evaluation of visual signals, including lab, closed-course, and public road tests using an autonomous vehicle. In addition, the paper also reports insights on pedestrian crosswalk behaviours and the impacts of pedestrian trust towards AVs on the behaviors. We hope that this work will constitute valuable input to the ongoing development of international standards for AV lamps, and thus help mature automated driving in general.
Human Perception of Surprise: A User Study
Jul 16, 2018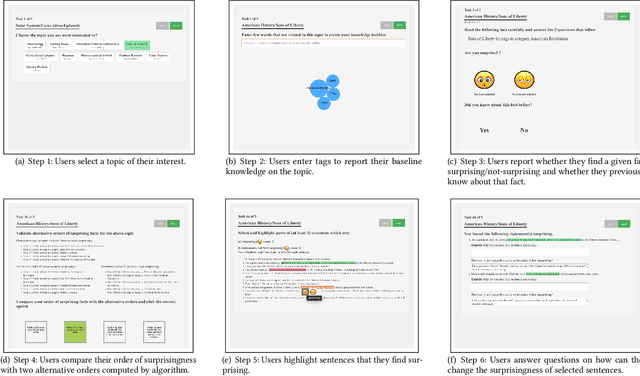
Understanding how to engage users is a critical question in many applications. Previous research has shown that unexpected or astonishing events can attract user attention, leading to positive outcomes such as engagement and learning. In this work, we investigate the similarity and differences in how people and algorithms rank the surprisingness of facts. Our crowdsourcing study, involving 106 participants, shows that computational models of surprise can be used to artificially induce surprise in humans.