 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHAWAII: Hierarchical Visual Knowledge Transfer for Efficient Vision-Language Models
Jun 23, 2025Improving the visual understanding ability of vision-language models (VLMs) is crucial for enhancing their performance across various tasks. While using multiple pretrained visual experts has shown great promise, it often incurs significant computational costs during training and inference. To address this challenge, we propose HAWAII, a novel framework that distills knowledge from multiple visual experts into a single vision encoder, enabling it to inherit the complementary strengths of several experts with minimal computational overhead. To mitigate conflicts among different teachers and switch between different teacher-specific knowledge, instead of using a fixed set of adapters for multiple teachers, we propose to use teacher-specific Low-Rank Adaptation (LoRA) adapters with a corresponding router. Each adapter is aligned with a specific teacher, avoiding noisy guidance during distillation. To enable efficient knowledge distillation, we propose fine-grained and coarse-grained distillation. At the fine-grained level, token importance scores are employed to emphasize the most informative tokens from each teacher adaptively. At the coarse-grained level, we summarize the knowledge from multiple teachers and transfer it to the student using a set of general-knowledge LoRA adapters with a router. Extensive experiments on various vision-language tasks demonstrate the superiority of HAWAII, compared to the popular open-source VLMs.
MFSeg: Efficient Multi-frame 3D Semantic Segmentation
May 07, 2025We propose MFSeg, an efficient multi-frame 3D semantic segmentation framework. By aggregating point cloud sequences at the feature level and regularizing the feature extraction and aggregation process, MFSeg reduces computational overhead while maintaining high accuracy. Moreover, by employing a lightweight MLP-based point decoder, our method eliminates the need to upsample redundant points from past frames. Experiments on the nuScenes and Waymo datasets show that MFSeg outperforms existing methods, demonstrating its effectiveness and efficiency.
LEO-MINI: An Efficient Multimodal Large Language Model using Conditional Token Reduction and Mixture of Multi-Modal Experts
Apr 07, 2025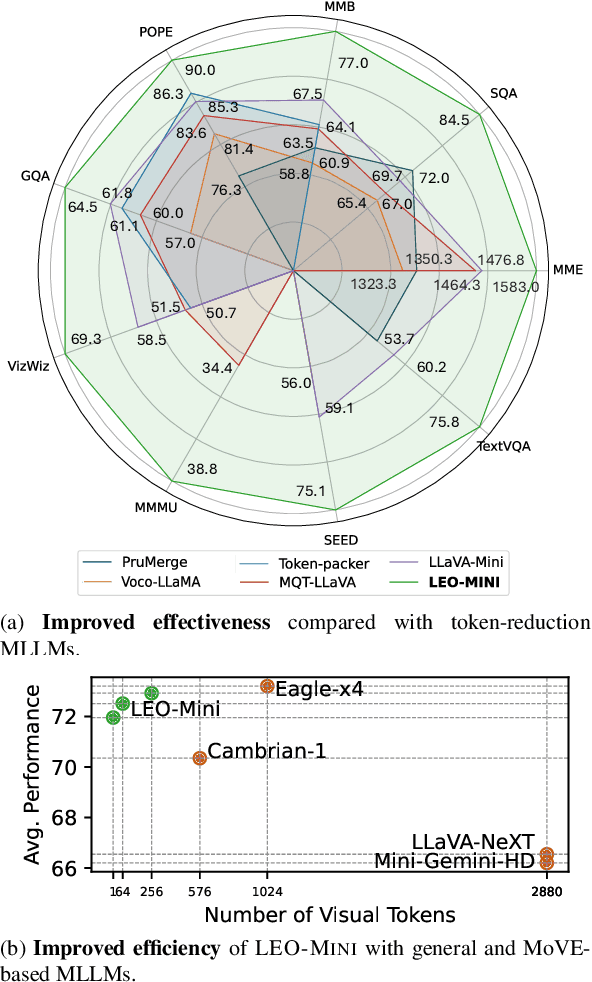
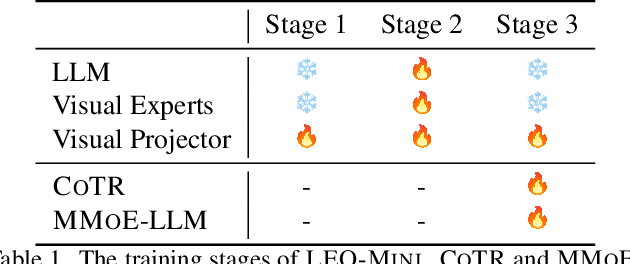
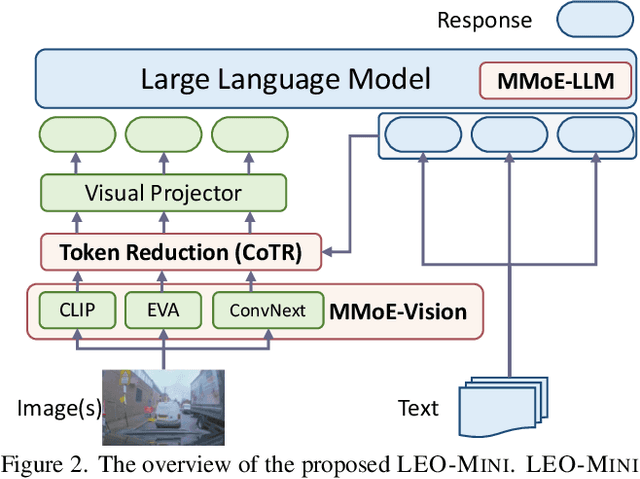
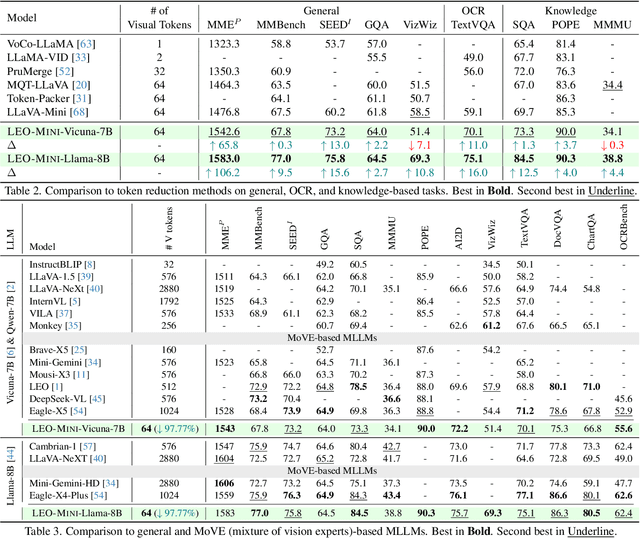
Redundancy of visual tokens in multi-modal large language models (MLLMs) significantly reduces their computational efficiency. Recent approaches, such as resamplers and summarizers, have sought to reduce the number of visual tokens, but at the cost of visual reasoning ability. To address this, we propose LEO-MINI, a novel MLLM that significantly reduces the number of visual tokens and simultaneously boosts visual reasoning capabilities. For efficiency, LEO-MINI incorporates CoTR, a novel token reduction module to consolidate a large number of visual tokens into a smaller set of tokens, using the similarity between visual tokens, text tokens, and a compact learnable query. For effectiveness, to scale up the model's ability with minimal computational overhead, LEO-MINI employs MMoE, a novel mixture of multi-modal experts module. MMOE employs a set of LoRA experts with a novel router to switch between them based on the input text and visual tokens instead of only using the input hidden state. MMoE also includes a general LoRA expert that is always activated to learn general knowledge for LLM reasoning. For extracting richer visual features, MMOE employs a set of vision experts trained on diverse domain-specific data. To demonstrate LEO-MINI's improved efficiency and performance, we evaluate it against existing efficient MLLMs on various benchmark vision-language tasks.
OV-SCAN: Semantically Consistent Alignment for Novel Object Discovery in Open-Vocabulary 3D Object Detection
Mar 09, 2025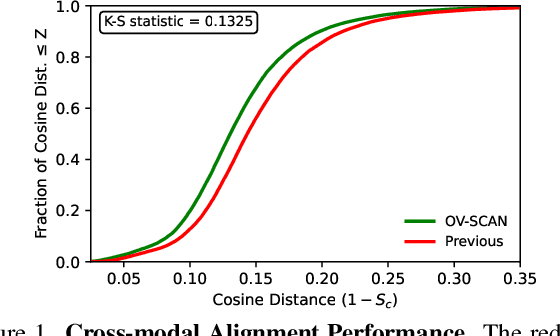
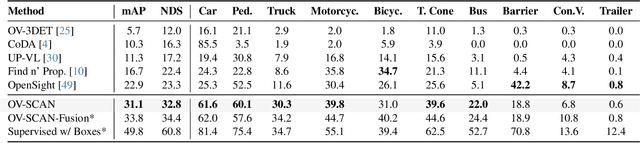
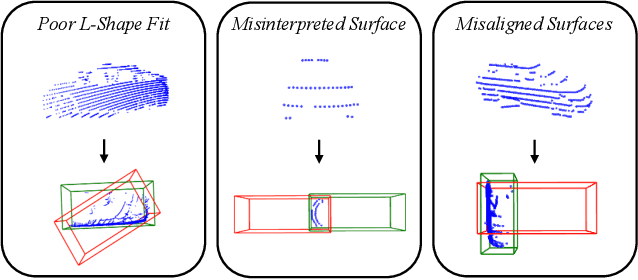
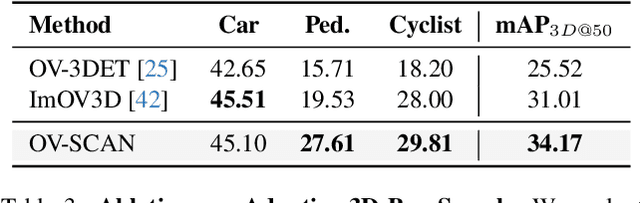
Open-vocabulary 3D object detection for autonomous driving aims to detect novel objects beyond the predefined training label sets in point cloud scenes. Existing approaches achieve this by connecting traditional 3D object detectors with vision-language models (VLMs) to regress 3D bounding boxes for novel objects and perform open-vocabulary classification through cross-modal alignment between 3D and 2D features. However, achieving robust cross-modal alignment remains a challenge due to semantic inconsistencies when generating corresponding 3D and 2D feature pairs. To overcome this challenge, we present OV-SCAN, an Open-Vocabulary 3D framework that enforces Semantically Consistent Alignment for Novel object discovery. OV-SCAN employs two core strategies: discovering precise 3D annotations and filtering out low-quality or corrupted alignment pairs (arising from 3D annotation, occlusion-induced, or resolution-induced noise). Extensive experiments on the nuScenes dataset demonstrate that OV-SCAN achieves state-of-the-art performance.
LEO: Boosting Mixture of Vision Encoders for Multimodal Large Language Models
Jan 13, 2025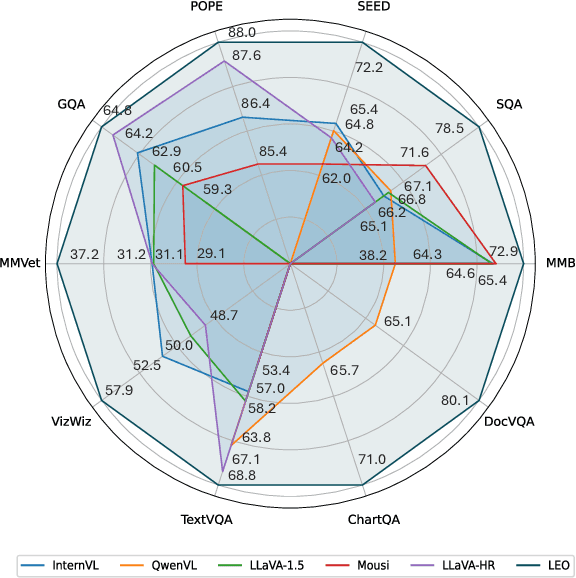
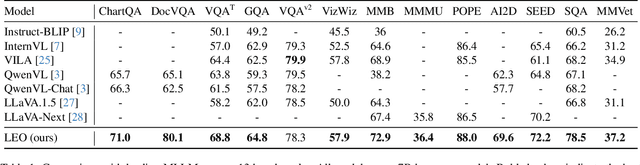
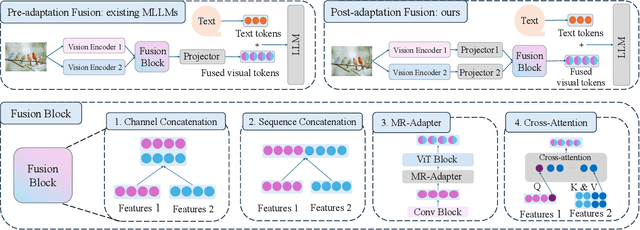

Enhanced visual understanding serves as a cornerstone for multimodal large language models (MLLMs). Recent hybrid MLLMs incorporate a mixture of vision experts to address the limitations of using a single vision encoder and excessively long visual tokens. Despite the progress of these MLLMs, a research gap remains in effectively integrating diverse vision encoders. This work explores fusion strategies of visual tokens for hybrid MLLMs, leading to the design of LEO, a novel MLLM with a dual-branch vision encoder framework that incorporates a post-adaptation fusion strategy and adaptive tiling: for each segmented tile of the input images, LEO sequentially interleaves the visual tokens from its two vision encoders. Extensive evaluation across 13 vision-language benchmarks reveals that LEO outperforms state-of-the-art open-source MLLMs and hybrid MLLMs on the majority of tasks. Furthermore, we show that LEO can be adapted to the specialized domain of autonomous driving without altering the model architecture or training recipe, achieving competitive performance compared to existing baselines. The code and model will be publicly available.
VADet: Multi-frame LiDAR 3D Object Detection using Variable Aggregation
Nov 20, 2024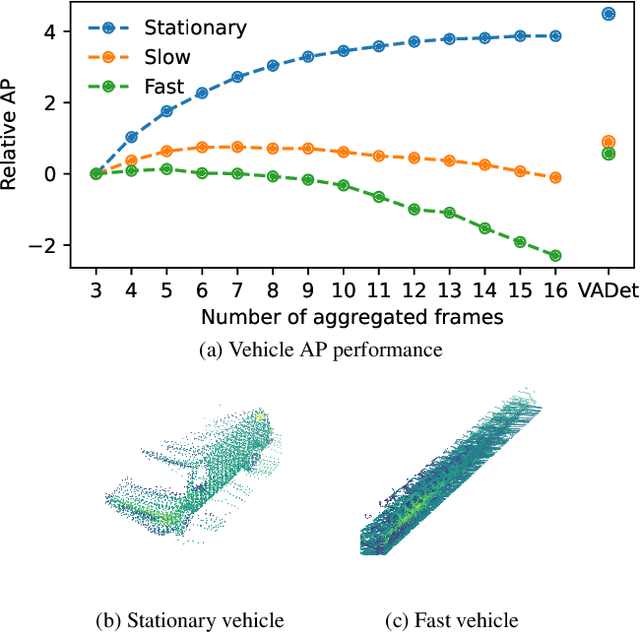
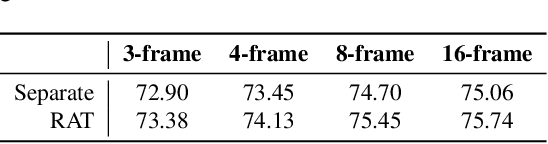

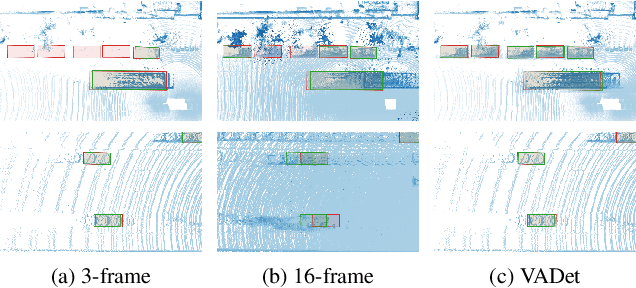
Input aggregation is a simple technique used by state-of-the-art LiDAR 3D object detectors to improve detection. However, increasing aggregation is known to have diminishing returns and even performance degradation, due to objects responding differently to the number of aggregated frames. To address this limitation, we propose an efficient adaptive method, which we call Variable Aggregation Detection (VADet). Instead of aggregating the entire scene using a fixed number of frames, VADet performs aggregation per object, with the number of frames determined by an object's observed properties, such as speed and point density. VADet thus reduces the inherent trade-offs of fixed aggregation and is not architecture specific. To demonstrate its benefits, we apply VADet to three popular single-stage detectors and achieve state-of-the-art performance on the Waymo dataset.
Enhancing Safety in Mixed Traffic: Learning-Based Modeling and Efficient Control of Autonomous and Human-Driven Vehicles
Apr 10, 2024
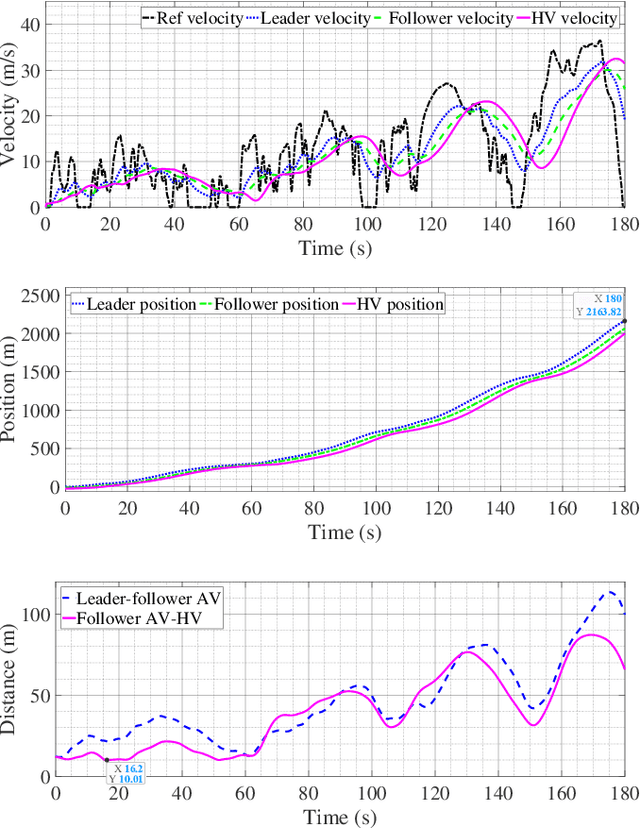
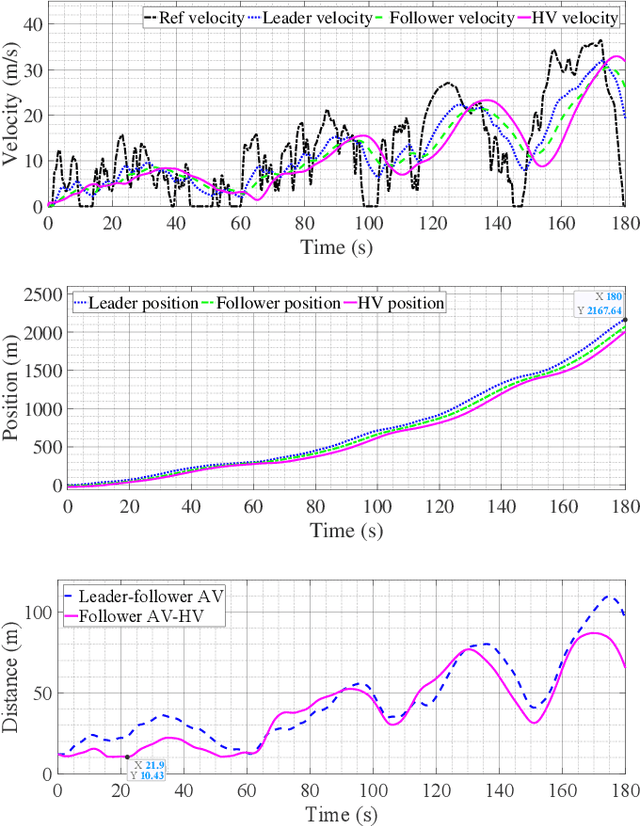
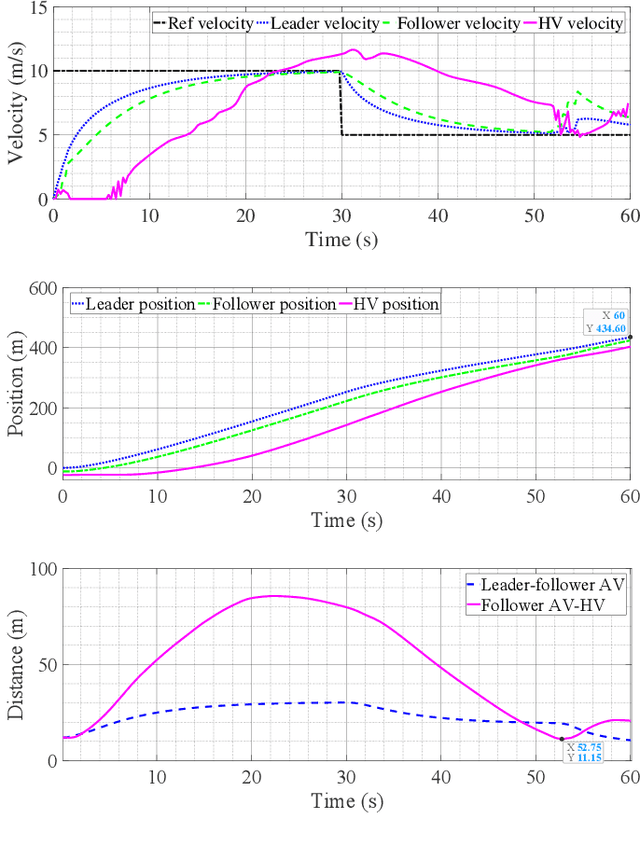
With the increasing presence of autonomous vehicles (AVs) on public roads, developing robust control strategies to navigate the uncertainty of human-driven vehicles (HVs) is crucial. This paper introduces an advanced method for modeling HV behavior, combining a first-principles model with Gaussian process (GP) learning to enhance velocity prediction accuracy and provide a measurable uncertainty. We validated this innovative HV model using real-world data from field experiments and applied it to develop a GP-enhanced model predictive control (GP-MPC) strategy. This strategy aims to improve safety in mixed vehicle platoons by integrating uncertainty assessment into distance constraints. Comparative simulation studies with a conventional model predictive control (MPC) approach demonstrated that our GP-MPC strategy ensures more reliable safe distancing and fosters efficient vehicular dynamics, achieving notably higher speeds within the platoon. By incorporating a sparse GP technique in HV modeling and adopting a dynamic GP prediction within the MPC framework, we significantly reduced the computation time of GP-MPC, marking it only 4.6% higher than that of the conventional MPC. This represents a substantial improvement, making the process about 100 times faster than our preliminary work without these approximations. Our findings underscore the effectiveness of learning-based HV modeling in enhancing both safety and operational efficiency in mixed-traffic environments, paving the way for more harmonious AV-HV interactions.
Assessing Visually-Continuous Corruption Robustness of Neural Networks Relative to Human Performance
Feb 29, 2024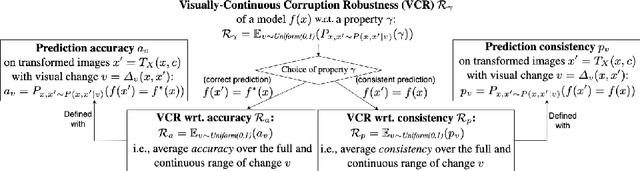
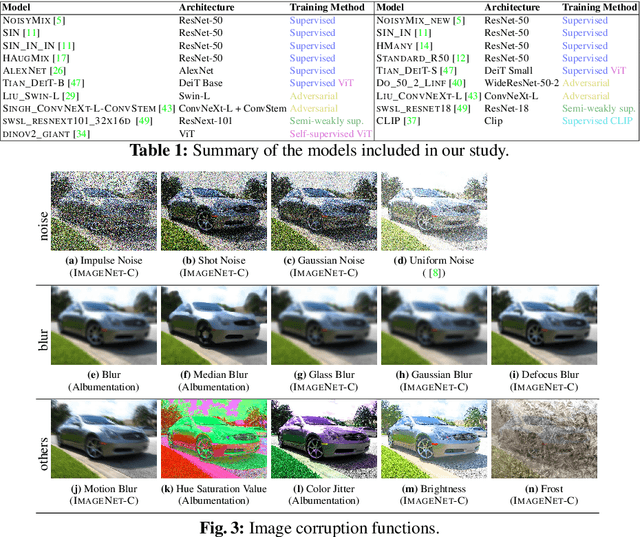
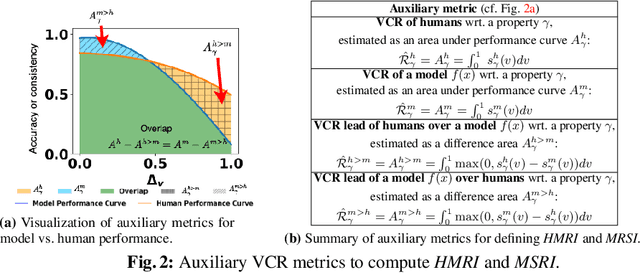
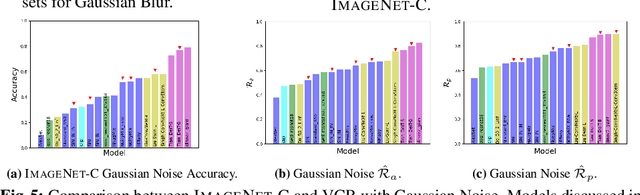
While Neural Networks (NNs) have surpassed human accuracy in image classification on ImageNet, they often lack robustness against image corruption, i.e., corruption robustness. Yet such robustness is seemingly effortless for human perception. In this paper, we propose visually-continuous corruption robustness (VCR) -- an extension of corruption robustness to allow assessing it over the wide and continuous range of changes that correspond to the human perceptive quality (i.e., from the original image to the full distortion of all perceived visual information), along with two novel human-aware metrics for NN evaluation. To compare VCR of NNs with human perception, we conducted extensive experiments on 14 commonly used image corruptions with 7,718 human participants and state-of-the-art robust NN models with different training objectives (e.g., standard, adversarial, corruption robustness), different architectures (e.g., convolution NNs, vision transformers), and different amounts of training data augmentation. Our study showed that: 1) assessing robustness against continuous corruption can reveal insufficient robustness undetected by existing benchmarks; as a result, 2) the gap between NN and human robustness is larger than previously known; and finally, 3) some image corruptions have a similar impact on human perception, offering opportunities for more cost-effective robustness assessments. Our validation set with 14 image corruptions, human robustness data, and the evaluation code is provided as a toolbox and a benchmark.
SSL-Interactions: Pretext Tasks for Interactive Trajectory Prediction
Jan 15, 2024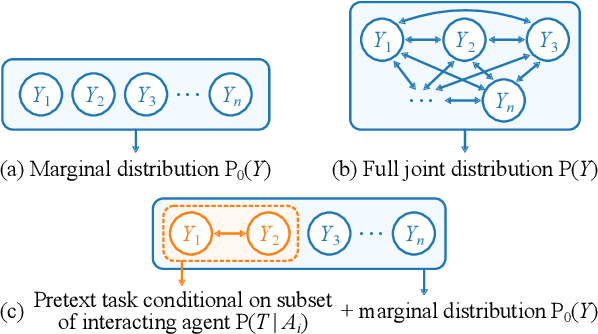
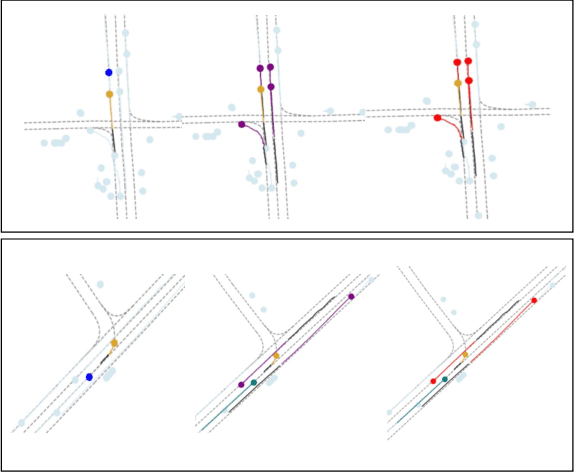
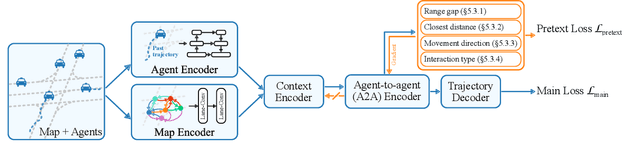
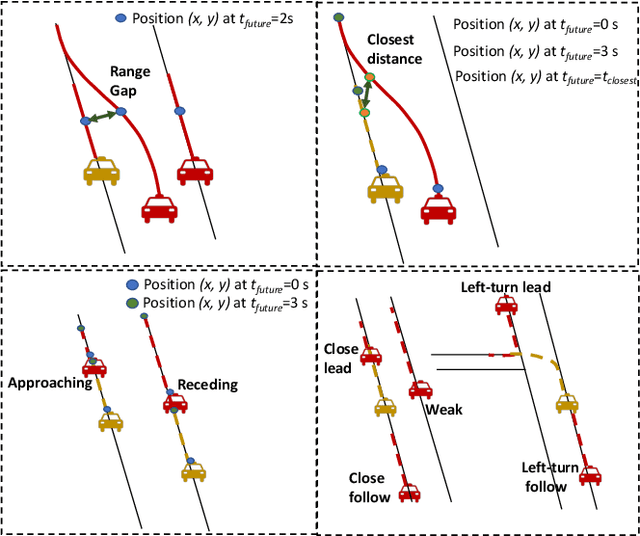
This paper addresses motion forecasting in multi-agent environments, pivotal for ensuring safety of autonomous vehicles. Traditional as well as recent data-driven marginal trajectory prediction methods struggle to properly learn non-linear agent-to-agent interactions. We present SSL-Interactions that proposes pretext tasks to enhance interaction modeling for trajectory prediction. We introduce four interaction-aware pretext tasks to encapsulate various aspects of agent interactions: range gap prediction, closest distance prediction, direction of movement prediction, and type of interaction prediction. We further propose an approach to curate interaction-heavy scenarios from datasets. This curated data has two advantages: it provides a stronger learning signal to the interaction model, and facilitates generation of pseudo-labels for interaction-centric pretext tasks. We also propose three new metrics specifically designed to evaluate predictions in interactive scenes. Our empirical evaluations indicate SSL-Interactions outperforms state-of-the-art motion forecasting methods quantitatively with up to 8% improvement, and qualitatively, for interaction-heavy scenarios.
SOAP: Cross-sensor Domain Adaptation for 3D Object Detection Using Stationary Object Aggregation Pseudo-labelling
Jan 08, 2024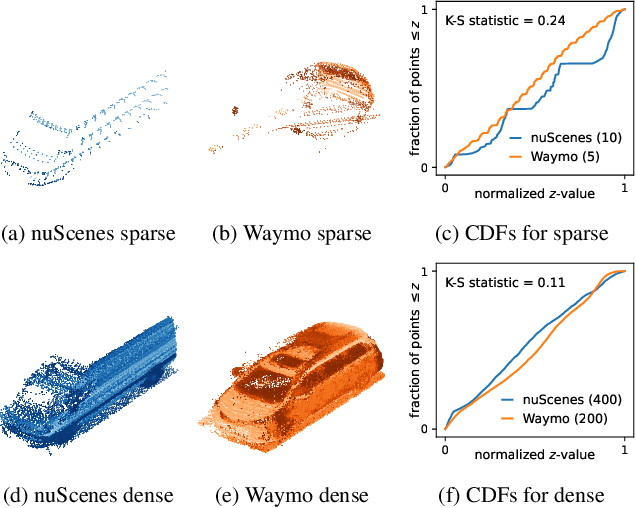
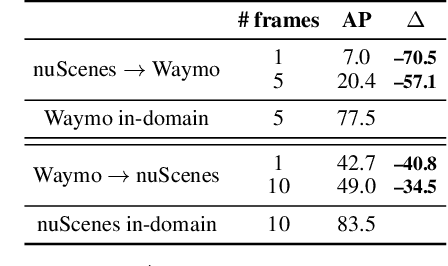
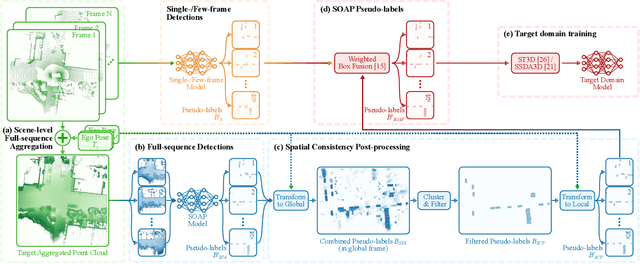
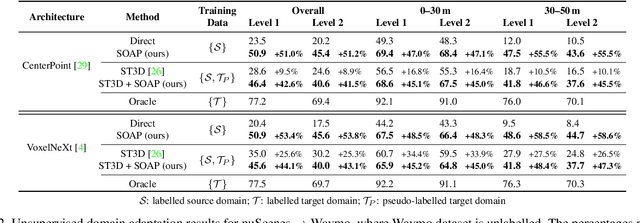
We consider the problem of cross-sensor domain adaptation in the context of LiDAR-based 3D object detection and propose Stationary Object Aggregation Pseudo-labelling (SOAP) to generate high quality pseudo-labels for stationary objects. In contrast to the current state-of-the-art in-domain practice of aggregating just a few input scans, SOAP aggregates entire sequences of point clouds at the input level to reduce the sensor domain gap. Then, by means of what we call quasi-stationary training and spatial consistency post-processing, the SOAP model generates accurate pseudo-labels for stationary objects, closing a minimum of 30.3% domain gap compared to few-frame detectors. Our results also show that state-of-the-art domain adaptation approaches can achieve even greater performance in combination with SOAP, in both the unsupervised and semi-supervised settings.