 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNighttime Autonomous Driving Scene Reconstruction with Physically-Based Gaussian Splatting
Feb 14, 2026This paper focuses on scene reconstruction under nighttime conditions in autonomous driving simulation. Recent methods based on Neural Radiance Fields (NeRFs) and 3D Gaussian Splatting (3DGS) have achieved photorealistic modeling in autonomous driving scene reconstruction, but they primarily focus on normal-light conditions. Low-light driving scenes are more challenging to model due to their complex lighting and appearance conditions, which often causes performance degradation of existing methods. To address this problem, this work presents a novel approach that integrates physically based rendering into 3DGS to enhance nighttime scene reconstruction for autonomous driving. Specifically, our approach integrates physically based rendering into composite scene Gaussian representations and jointly optimizes Bidirectional Reflectance Distribution Function (BRDF) based material properties. We explicitly model diffuse components through a global illumination module and specular components by anisotropic spherical Gaussians. As a result, our approach improves reconstruction quality for outdoor nighttime driving scenes, while maintaining real-time rendering. Extensive experiments across diverse nighttime scenarios on two real-world autonomous driving datasets, including nuScenes and Waymo, demonstrate that our approach outperforms the state-of-the-art methods both quantitatively and qualitatively.
Spatial4D-Bench: A Versatile 4D Spatial Intelligence Benchmark
Dec 31, 20254D spatial intelligence involves perceiving and processing how objects move or change over time. Humans naturally possess 4D spatial intelligence, supporting a broad spectrum of spatial reasoning abilities. To what extent can Multimodal Large Language Models (MLLMs) achieve human-level 4D spatial intelligence? In this work, we present Spatial4D-Bench, a versatile 4D spatial intelligence benchmark designed to comprehensively assess the 4D spatial reasoning abilities of MLLMs. Unlike existing spatial intelligence benchmarks that are often small-scale or limited in diversity, Spatial4D-Bench provides a large-scale, multi-task evaluation benchmark consisting of ~40,000 question-answer pairs covering 18 well-defined tasks. We systematically organize these tasks into six cognitive categories: object understanding, scene understanding, spatial relationship understanding, spatiotemporal relationship understanding, spatial reasoning and spatiotemporal reasoning. Spatial4D-Bench thereby offers a structured and comprehensive benchmark for evaluating the spatial cognition abilities of MLLMs, covering a broad spectrum of tasks that parallel the versatility of human spatial intelligence. We benchmark various state-of-the-art open-source and proprietary MLLMs on Spatial4D-Bench and reveal their substantial limitations in a wide variety of 4D spatial reasoning aspects, such as route plan, action recognition, and physical plausibility reasoning. We hope that the findings provided in this work offer valuable insights to the community and that our benchmark can facilitate the development of more capable MLLMs toward human-level 4D spatial intelligence. More resources can be found on our project page.
MFSeg: Efficient Multi-frame 3D Semantic Segmentation
May 07, 2025We propose MFSeg, an efficient multi-frame 3D semantic segmentation framework. By aggregating point cloud sequences at the feature level and regularizing the feature extraction and aggregation process, MFSeg reduces computational overhead while maintaining high accuracy. Moreover, by employing a lightweight MLP-based point decoder, our method eliminates the need to upsample redundant points from past frames. Experiments on the nuScenes and Waymo datasets show that MFSeg outperforms existing methods, demonstrating its effectiveness and efficiency.
VADet: Multi-frame LiDAR 3D Object Detection using Variable Aggregation
Nov 20, 2024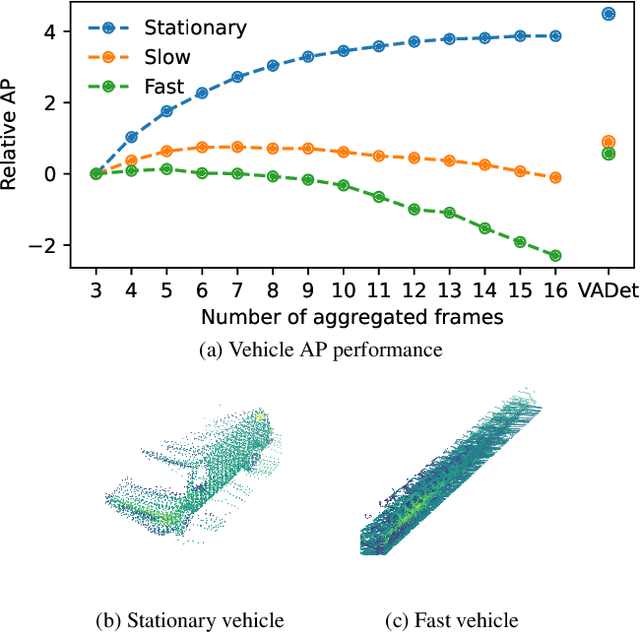

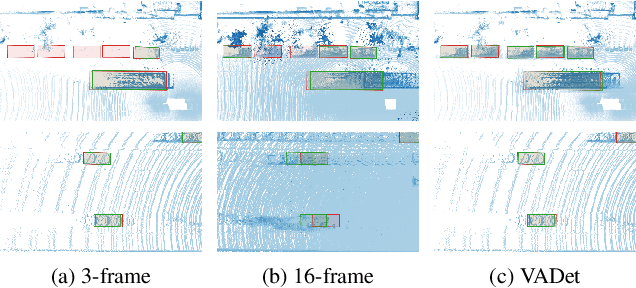
Input aggregation is a simple technique used by state-of-the-art LiDAR 3D object detectors to improve detection. However, increasing aggregation is known to have diminishing returns and even performance degradation, due to objects responding differently to the number of aggregated frames. To address this limitation, we propose an efficient adaptive method, which we call Variable Aggregation Detection (VADet). Instead of aggregating the entire scene using a fixed number of frames, VADet performs aggregation per object, with the number of frames determined by an object's observed properties, such as speed and point density. VADet thus reduces the inherent trade-offs of fixed aggregation and is not architecture specific. To demonstrate its benefits, we apply VADet to three popular single-stage detectors and achieve state-of-the-art performance on the Waymo dataset.
SSL-Interactions: Pretext Tasks for Interactive Trajectory Prediction
Jan 15, 2024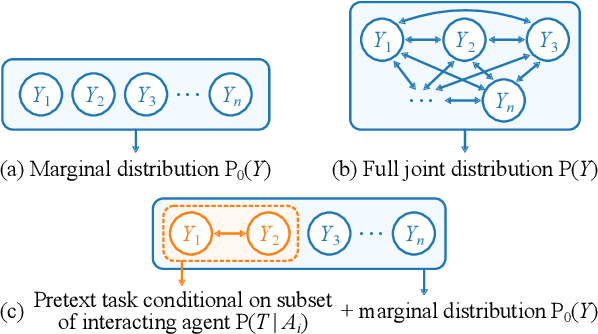
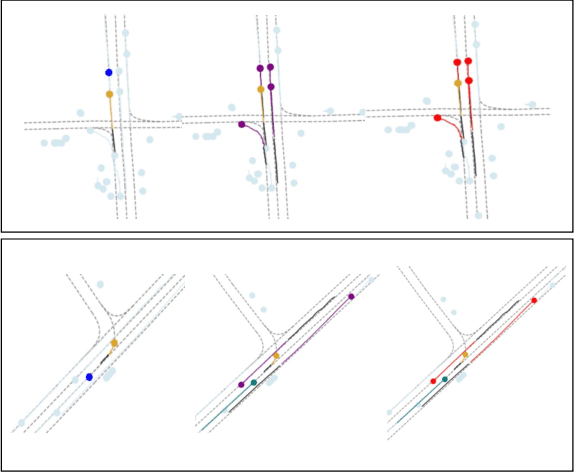
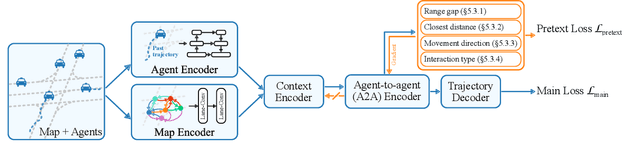
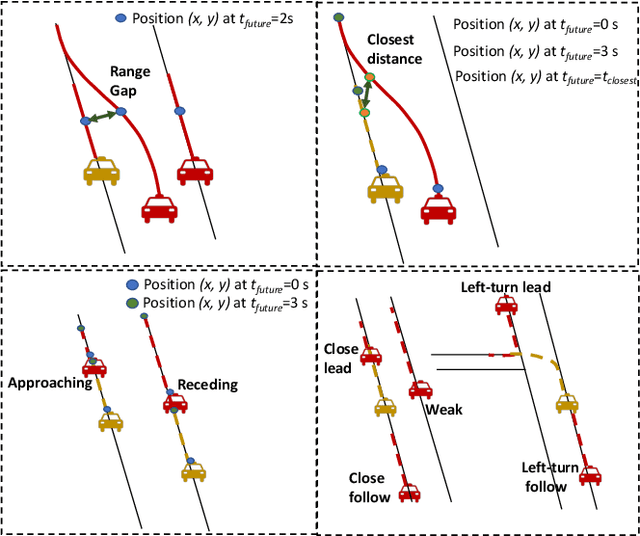
This paper addresses motion forecasting in multi-agent environments, pivotal for ensuring safety of autonomous vehicles. Traditional as well as recent data-driven marginal trajectory prediction methods struggle to properly learn non-linear agent-to-agent interactions. We present SSL-Interactions that proposes pretext tasks to enhance interaction modeling for trajectory prediction. We introduce four interaction-aware pretext tasks to encapsulate various aspects of agent interactions: range gap prediction, closest distance prediction, direction of movement prediction, and type of interaction prediction. We further propose an approach to curate interaction-heavy scenarios from datasets. This curated data has two advantages: it provides a stronger learning signal to the interaction model, and facilitates generation of pseudo-labels for interaction-centric pretext tasks. We also propose three new metrics specifically designed to evaluate predictions in interactive scenes. Our empirical evaluations indicate SSL-Interactions outperforms state-of-the-art motion forecasting methods quantitatively with up to 8% improvement, and qualitatively, for interaction-heavy scenarios.
SOAP: Cross-sensor Domain Adaptation for 3D Object Detection Using Stationary Object Aggregation Pseudo-labelling
Jan 08, 2024
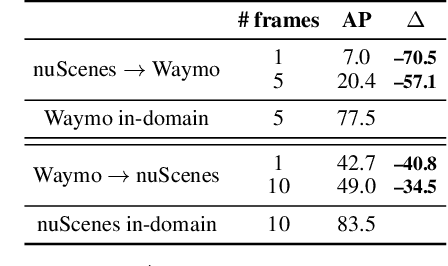
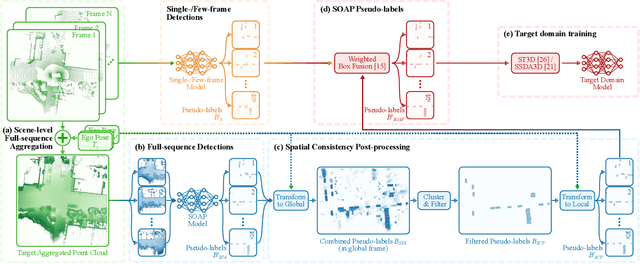
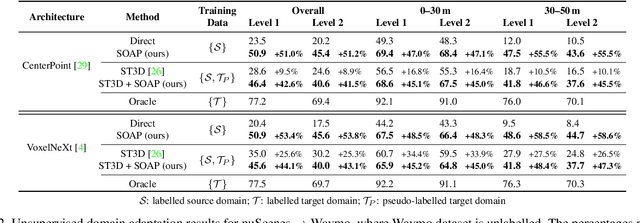
We consider the problem of cross-sensor domain adaptation in the context of LiDAR-based 3D object detection and propose Stationary Object Aggregation Pseudo-labelling (SOAP) to generate high quality pseudo-labels for stationary objects. In contrast to the current state-of-the-art in-domain practice of aggregating just a few input scans, SOAP aggregates entire sequences of point clouds at the input level to reduce the sensor domain gap. Then, by means of what we call quasi-stationary training and spatial consistency post-processing, the SOAP model generates accurate pseudo-labels for stationary objects, closing a minimum of 30.3% domain gap compared to few-frame detectors. Our results also show that state-of-the-art domain adaptation approaches can achieve even greater performance in combination with SOAP, in both the unsupervised and semi-supervised settings.
Towards Object Re-Identification from Point Clouds for 3D MOT
May 17, 2023In this work, we study the problem of object re-identification (ReID) in a 3D multi-object tracking (MOT) context, by learning to match pairs of objects from cropped (e.g., using their predicted 3D bounding boxes) point cloud observations. We are not concerned with SOTA performance for 3D MOT, however. Instead, we seek to answer the following question: In a realistic tracking by-detection context, how does object ReID from point clouds perform relative to ReID from images? To enable such a study, we propose a lightweight matching head that can be concatenated to any set or sequence processing backbone (e.g., PointNet or ViT), creating a family of comparable object ReID networks for both modalities. Run in siamese style, our proposed point-cloud ReID networks can make thousands of pairwise comparisons in real-time (10 hz). Our findings demonstrate that their performance increases with higher sensor resolution and approaches that of image ReID when observations are sufficiently dense. Additionally, we investigate our network's ability to enhance 3D multi-object tracking (MOT), showing that our point-cloud ReID networks can successfully re-identify objects which led a strong motion-based tracker into error. To our knowledge, we are the first to study real-time object re-identification from point clouds in a 3D multi-object tracking context.
Out-of-Distribution Detection for LiDAR-based 3D Object Detection
Sep 28, 2022



3D object detection is an essential part of automated driving, and deep neural networks (DNNs) have achieved state-of-the-art performance for this task. However, deep models are notorious for assigning high confidence scores to out-of-distribution (OOD) inputs, that is, inputs that are not drawn from the training distribution. Detecting OOD inputs is challenging and essential for the safe deployment of models. OOD detection has been studied extensively for the classification task, but it has not received enough attention for the object detection task, specifically LiDAR-based 3D object detection. In this paper, we focus on the detection of OOD inputs for LiDAR-based 3D object detection. We formulate what OOD inputs mean for object detection and propose to adapt several OOD detection methods for object detection. We accomplish this by our proposed feature extraction method. To evaluate OOD detection methods, we develop a simple but effective technique of generating OOD objects for a given object detection model. Our evaluation based on the KITTI dataset shows that different OOD detection methods have biases toward detecting specific OOD objects. It emphasizes the importance of combined OOD detection methods and more research in this direction.
SSL-Lanes: Self-Supervised Learning for Motion Forecasting in Autonomous Driving
Jun 28, 2022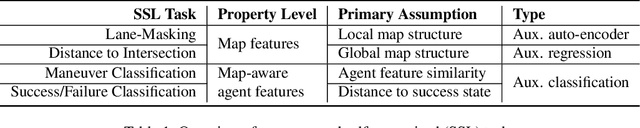
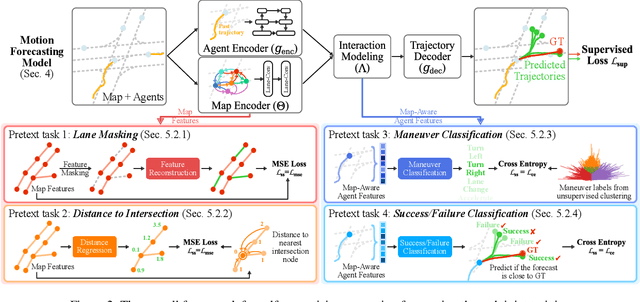
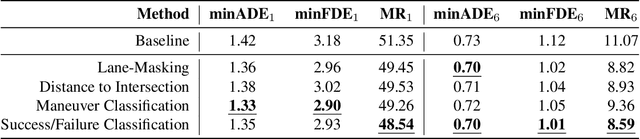
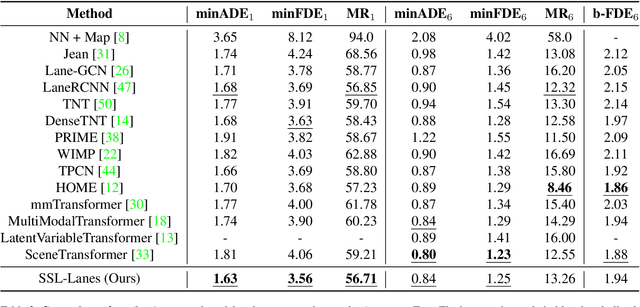
Self-supervised learning (SSL) is an emerging technique that has been successfully employed to train convolutional neural networks (CNNs) and graph neural networks (GNNs) for more transferable, generalizable, and robust representation learning. However its potential in motion forecasting for autonomous driving has rarely been explored. In this study, we report the first systematic exploration and assessment of incorporating self-supervision into motion forecasting. We first propose to investigate four novel self-supervised learning tasks for motion forecasting with theoretical rationale and quantitative and qualitative comparisons on the challenging large-scale Argoverse dataset. Secondly, we point out that our auxiliary SSL-based learning setup not only outperforms forecasting methods which use transformers, complicated fusion mechanisms and sophisticated online dense goal candidate optimization algorithms in terms of performance accuracy, but also has low inference time and architectural complexity. Lastly, we conduct several experiments to understand why SSL improves motion forecasting. Code is open-sourced at \url{https://github.com/AutoVision-cloud/SSL-Lanes}.
LiDAR-MIMO: Efficient Uncertainty Estimation for LiDAR-based 3D Object Detection
Jun 01, 2022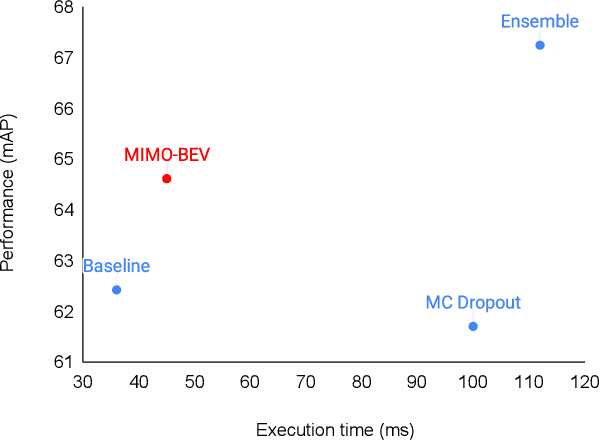



The estimation of uncertainty in robotic vision, such as 3D object detection, is an essential component in developing safe autonomous systems aware of their own performance. However, the deployment of current uncertainty estimation methods in 3D object detection remains challenging due to timing and computational constraints. To tackle this issue, we propose LiDAR-MIMO, an adaptation of the multi-input multi-output (MIMO) uncertainty estimation method to the LiDAR-based 3D object detection task. Our method modifies the original MIMO by performing multi-input at the feature level to ensure the detection, uncertainty estimation, and runtime performance benefits are retained despite the limited capacity of the underlying detector and the large computational costs of point cloud processing. We compare LiDAR-MIMO with MC dropout and ensembles as baselines and show comparable uncertainty estimation results with only a small number of output heads. Further, LiDAR-MIMO can be configured to be twice as fast as MC dropout and ensembles, while achieving higher mAP than MC dropout and approaching that of ensembles.