 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSOAP: Cross-sensor Domain Adaptation for 3D Object Detection Using Stationary Object Aggregation Pseudo-labelling
Paper and Code
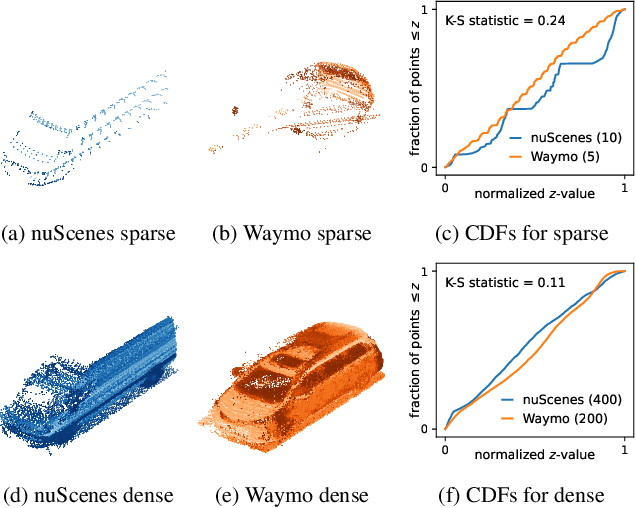
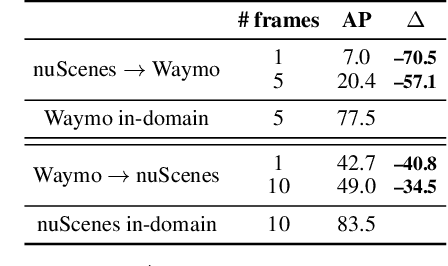
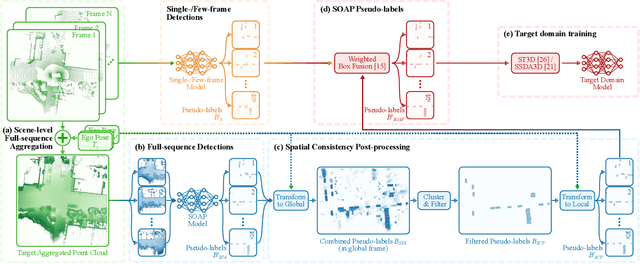
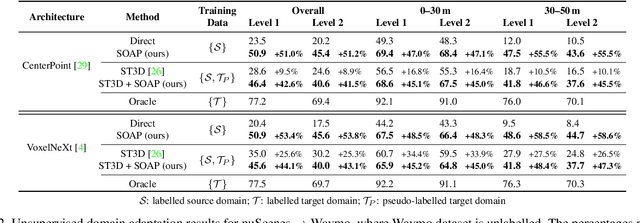
We consider the problem of cross-sensor domain adaptation in the context of LiDAR-based 3D object detection and propose Stationary Object Aggregation Pseudo-labelling (SOAP) to generate high quality pseudo-labels for stationary objects. In contrast to the current state-of-the-art in-domain practice of aggregating just a few input scans, SOAP aggregates entire sequences of point clouds at the input level to reduce the sensor domain gap. Then, by means of what we call quasi-stationary training and spatial consistency post-processing, the SOAP model generates accurate pseudo-labels for stationary objects, closing a minimum of 30.3% domain gap compared to few-frame detectors. Our results also show that state-of-the-art domain adaptation approaches can achieve even greater performance in combination with SOAP, in both the unsupervised and semi-supervised settings.