 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe missing link: Developing a safety case for perception components in automated driving
Aug 30, 2021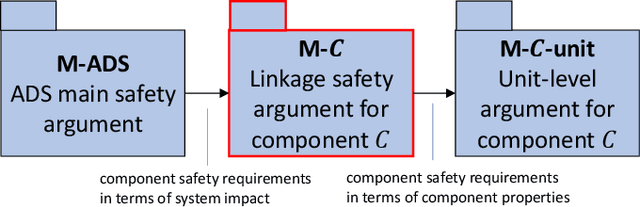
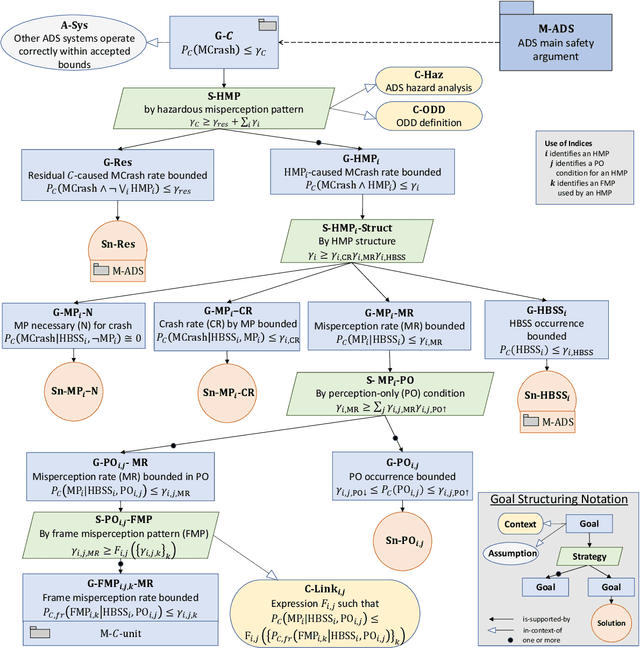
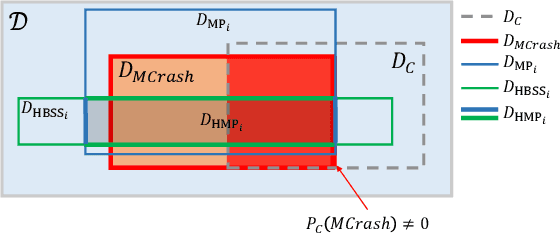
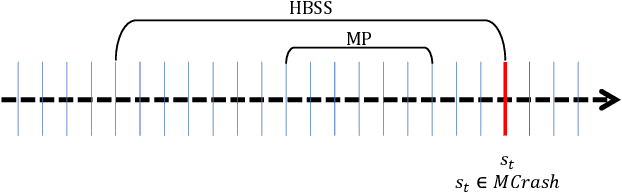
Safety assurance is a central concern for the development and societal acceptance of automated driving (AD) systems. Perception is a key aspect of AD that relies heavily on Machine Learning (ML). Despite the known challenges with the safety assurance of ML-based components, proposals have recently emerged for unit-level safety cases addressing these components. Unfortunately, AD safety cases express safety requirements at the system-level and these efforts are missing the critical linking argument connecting safety requirements at the system-level to component performance requirements at the unit-level. In this paper, we propose a generic template for such a linking argument specifically tailored for perception components. The template takes a deductive and formal approach to define strong traceability between levels. We demonstrate the applicability of the template with a detailed case study and discuss its use as a tool to support incremental development of perception components.
Open Problems in Engineering Machine Learning Systems and the Quality Model
Apr 01, 2019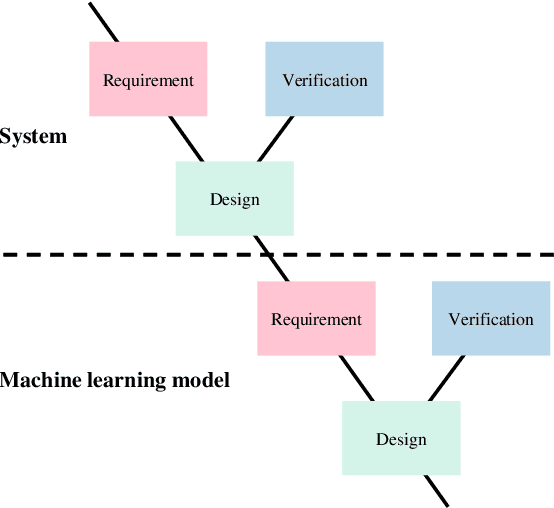
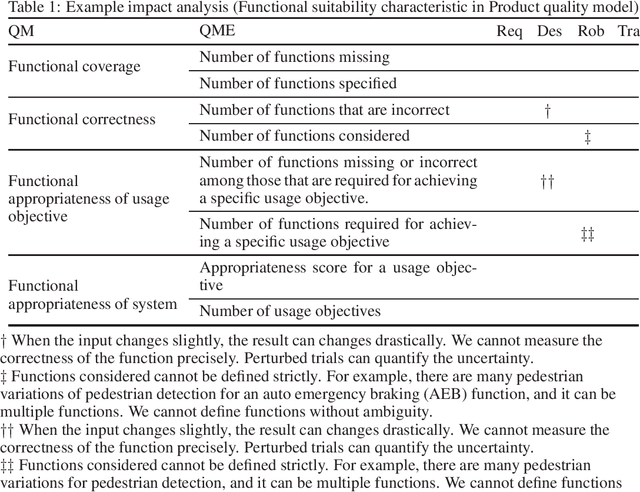
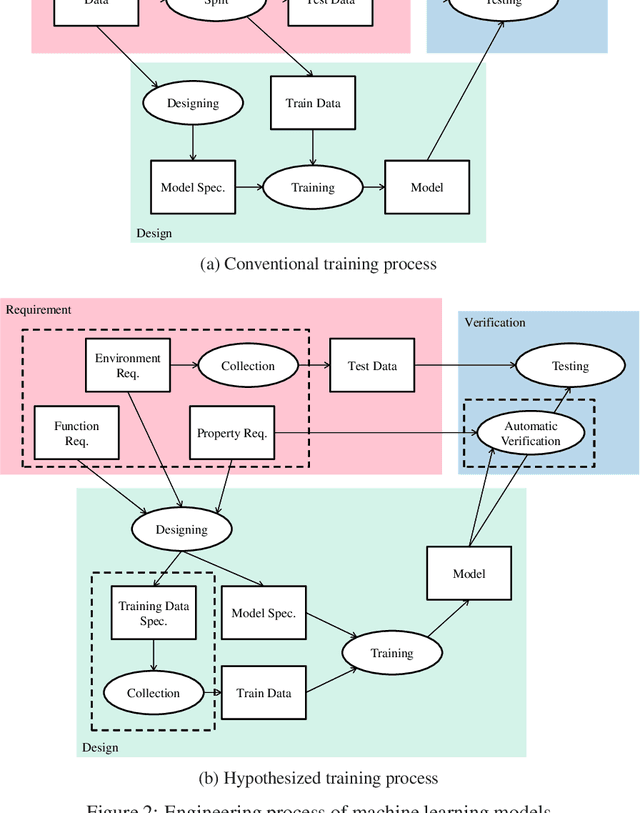
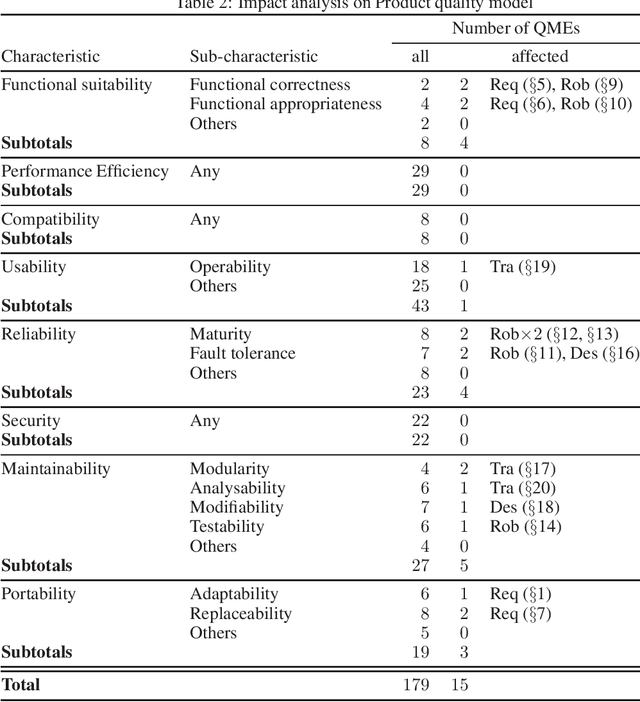
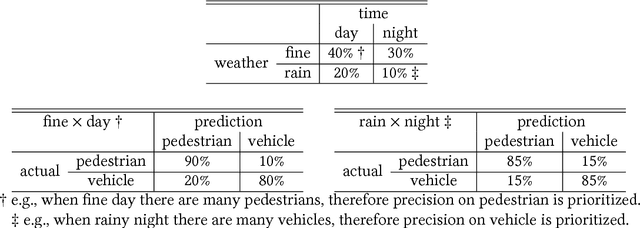
Fatal accidents are a major issue hindering the wide acceptance of safety-critical systems that use machine learning and deep learning models, such as automated driving vehicles. To use machine learning in a safety-critical system, it is necessary to demonstrate the safety and security of the system to society through the engineering process. However, there have been no such total concepts or frameworks established for these systems that have been widely accepted, and needs or open problems are not organized in a way researchers can select a theme and work on. The key to using a machine learning model in a deductively engineered system, developed in a rigorous development lifecycle consisting of requirement, design, and verification, cf. V-Model, is decomposing the data-driven training of machine-learning models into requirement, design, and verification, especially for machine learning models used in safety-critical systems. In this study, we identify, classify, and explore the open problems in engineering (safety-critical) machine learning systems, i.e., requirement, design, and verification of machine learning models and systems, as well as related works and research directions, using automated driving vehicles as an example. We also discuss the introduction of machine-learning models into a conventional system quality model such as SQuARE to study the quality model for machine learning systems.
Open Problems in Engineering and Quality Assurance of Safety Critical Machine Learning Systems
Dec 07, 2018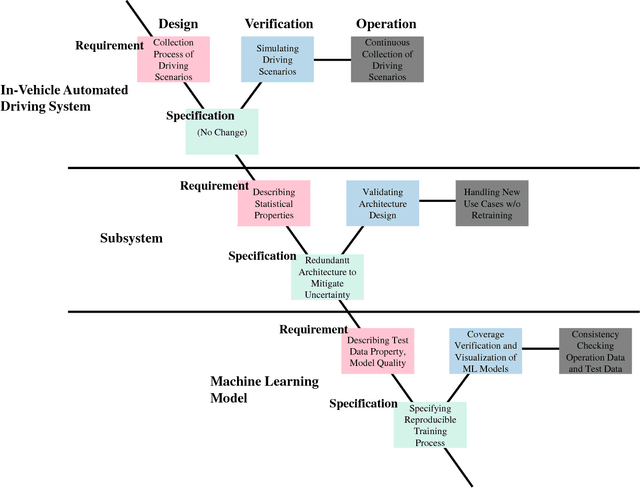

Fatal accidents are a major issue hindering the wide acceptance of safety-critical systems using machine-learning and deep-learning models, such as automated-driving vehicles. Quality assurance frameworks are required for such machine learning systems, but there are no widely accepted and established quality-assurance concepts and techniques. At the same time, open problems and the relevant technical fields are not organized. To establish standard quality assurance frameworks, it is necessary to visualize and organize these open problems in an interdisciplinary way, so that the experts from many different technical fields may discuss these problems in depth and develop solutions. In the present study, we identify, classify, and explore the open problems in quality assurance of safety-critical machine-learning systems, and their relevant corresponding industry and technological trends, using automated-driving vehicles as an example. Our results show that addressing these open problems requires incorporating knowledge from several different technological and industrial fields, including the automobile industry, statistics, software engineering, and machine learning.