 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOut-of-Distribution Detection for LiDAR-based 3D Object Detection
Sep 28, 2022



3D object detection is an essential part of automated driving, and deep neural networks (DNNs) have achieved state-of-the-art performance for this task. However, deep models are notorious for assigning high confidence scores to out-of-distribution (OOD) inputs, that is, inputs that are not drawn from the training distribution. Detecting OOD inputs is challenging and essential for the safe deployment of models. OOD detection has been studied extensively for the classification task, but it has not received enough attention for the object detection task, specifically LiDAR-based 3D object detection. In this paper, we focus on the detection of OOD inputs for LiDAR-based 3D object detection. We formulate what OOD inputs mean for object detection and propose to adapt several OOD detection methods for object detection. We accomplish this by our proposed feature extraction method. To evaluate OOD detection methods, we develop a simple but effective technique of generating OOD objects for a given object detection model. Our evaluation based on the KITTI dataset shows that different OOD detection methods have biases toward detecting specific OOD objects. It emphasizes the importance of combined OOD detection methods and more research in this direction.
The missing link: Developing a safety case for perception components in automated driving
Aug 30, 2021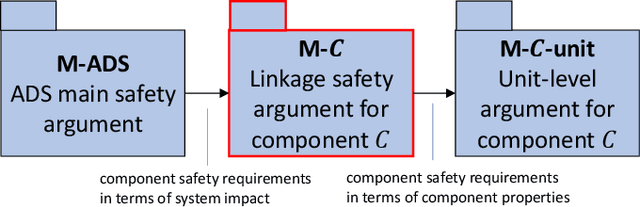
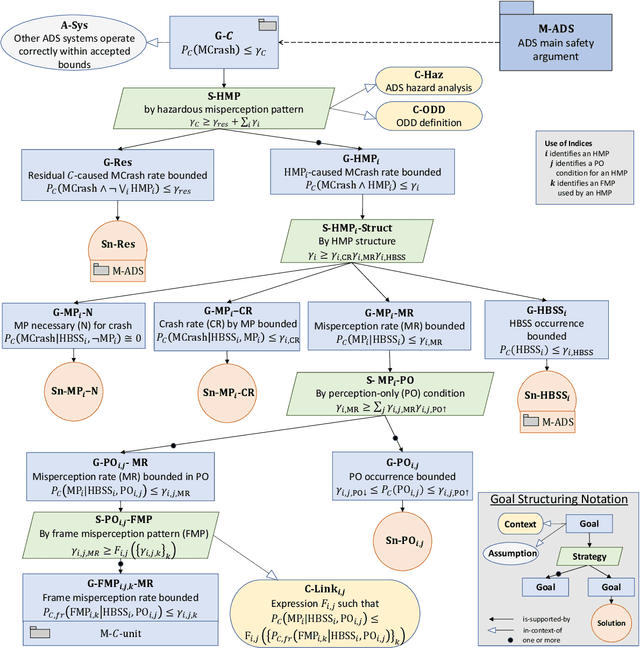
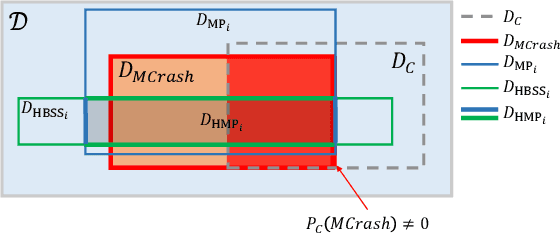
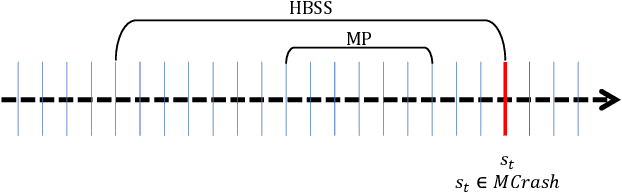
Safety assurance is a central concern for the development and societal acceptance of automated driving (AD) systems. Perception is a key aspect of AD that relies heavily on Machine Learning (ML). Despite the known challenges with the safety assurance of ML-based components, proposals have recently emerged for unit-level safety cases addressing these components. Unfortunately, AD safety cases express safety requirements at the system-level and these efforts are missing the critical linking argument connecting safety requirements at the system-level to component performance requirements at the unit-level. In this paper, we propose a generic template for such a linking argument specifically tailored for perception components. The template takes a deductive and formal approach to define strong traceability between levels. We demonstrate the applicability of the template with a detailed case study and discuss its use as a tool to support incremental development of perception components.