 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBalancing Pareto Front exploration of Non-dominated Tournament Genetic Algorithm (B-NTGA) in solving multi-objective NP-hard problems with constraints
Oct 08, 2024The paper presents a new balanced selection operator applied to the proposed Balanced Non-dominated Tournament Genetic Algorithm (B-NTGA) that actively uses archive to solve multi- and many-objective NP-hard combinatorial optimization problems with constraints. The primary motivation is to make B-NTGA more efficient in exploring Pareto Front Approximation (PFa), focusing on 'gaps' and reducing some PFa regions' sampling too frequently. Such a balancing mechanism allows B-NTGA to be more adaptive and focus on less explored PFa regions. The proposed B-NTGA is investigated on two benchmark multi- and many-objective optimization real-world problems, like Thief Traveling Problem and Multi-Skill Resource-Constrained Project Scheduling Problem. The results of experiments show that B-NTGA has a higher efficiency and better performance than state-of-the-art methods.
* PREPRINT
Enhancing Safety in Mixed Traffic: Learning-Based Modeling and Efficient Control of Autonomous and Human-Driven Vehicles
Apr 10, 2024
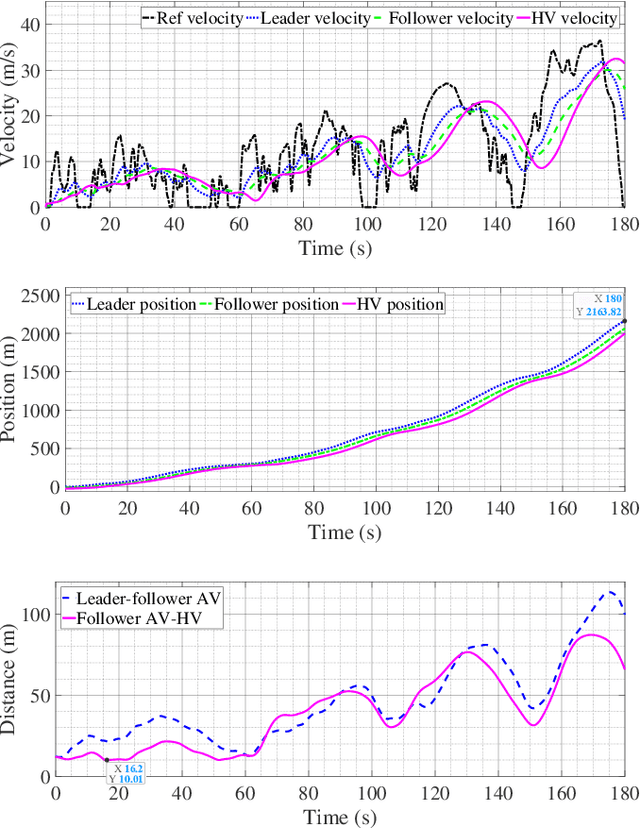
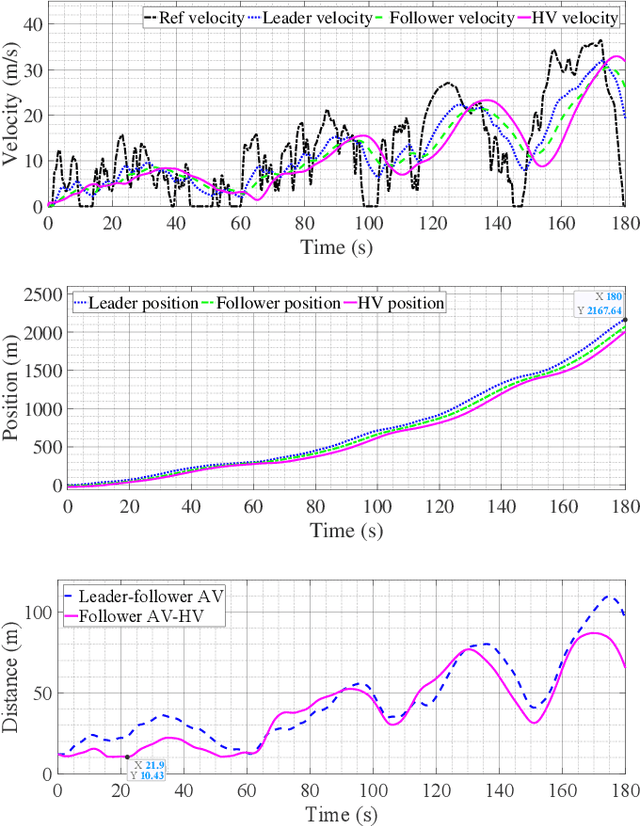
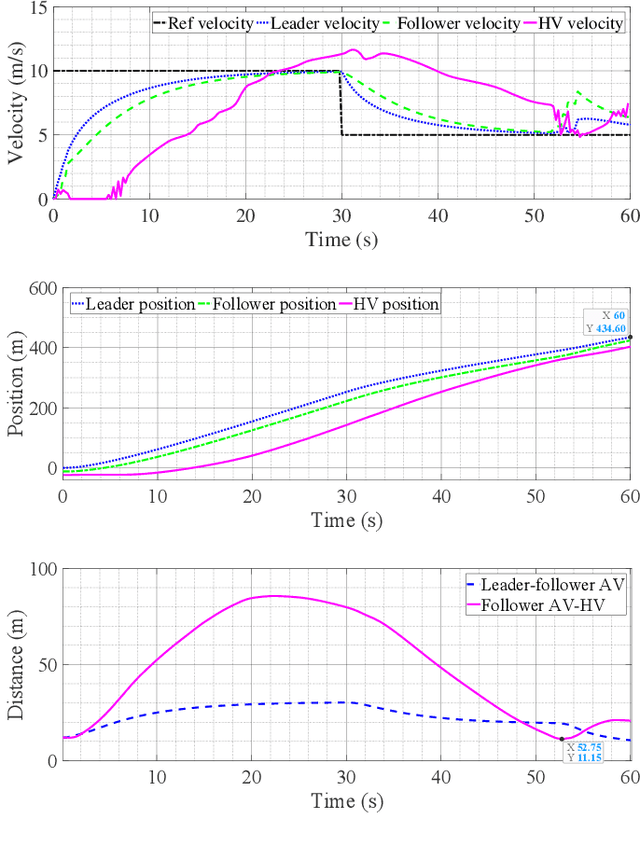
With the increasing presence of autonomous vehicles (AVs) on public roads, developing robust control strategies to navigate the uncertainty of human-driven vehicles (HVs) is crucial. This paper introduces an advanced method for modeling HV behavior, combining a first-principles model with Gaussian process (GP) learning to enhance velocity prediction accuracy and provide a measurable uncertainty. We validated this innovative HV model using real-world data from field experiments and applied it to develop a GP-enhanced model predictive control (GP-MPC) strategy. This strategy aims to improve safety in mixed vehicle platoons by integrating uncertainty assessment into distance constraints. Comparative simulation studies with a conventional model predictive control (MPC) approach demonstrated that our GP-MPC strategy ensures more reliable safe distancing and fosters efficient vehicular dynamics, achieving notably higher speeds within the platoon. By incorporating a sparse GP technique in HV modeling and adopting a dynamic GP prediction within the MPC framework, we significantly reduced the computation time of GP-MPC, marking it only 4.6% higher than that of the conventional MPC. This represents a substantial improvement, making the process about 100 times faster than our preliminary work without these approximations. Our findings underscore the effectiveness of learning-based HV modeling in enhancing both safety and operational efficiency in mixed-traffic environments, paving the way for more harmonious AV-HV interactions.