 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproved Performances and Motivation in Intelligent Tutoring Systems: Combining Machine Learning and Learner Choice
Jan 16, 2024Large class sizes pose challenges to personalized learning in schools, which educational technologies, especially intelligent tutoring systems (ITS), aim to address. In this context, the ZPDES algorithm, based on the Learning Progress Hypothesis (LPH) and multi-armed bandit machine learning techniques, sequences exercises that maximize learning progress (LP). This algorithm was previously shown in field studies to boost learning performances for a wider diversity of students compared to a hand-designed curriculum. However, its motivational impact was not assessed. Also, ZPDES did not allow students to express choices. This limitation in agency is at odds with the LPH theory concerned with modeling curiosity-driven learning. We here study how the introduction of such choice possibilities impact both learning efficiency and motivation. The given choice concerns dimensions that are orthogonal to exercise difficulty, acting as a playful feature. In an extensive field study (265 7-8 years old children, RCT design), we compare systems based either on ZPDES or a hand-designed curriculum, both with and without self-choice. We first show that ZPDES improves learning performance and produces a positive and motivating learning experience. We then show that the addition of choice triggers intrinsic motivation and reinforces the learning effectiveness of the LP-based personalization. In doing so, it strengthens the links between intrinsic motivation and performance progress during the serious game. Conversely, deleterious effects of the playful feature are observed for hand-designed linear paths. Thus, the intrinsic motivation elicited by a playful feature is beneficial only if the curriculum personalization is effective for the learner. Such a result deserves great attention due to increased use of playful features in non adaptive educational technologies.
Identifying Functions and Behaviours of Social Robots during Learning Activities: Teachers' Perspective
Oct 30, 2021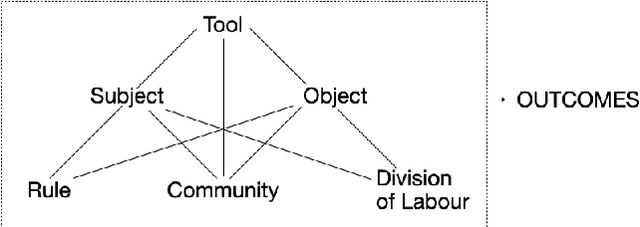
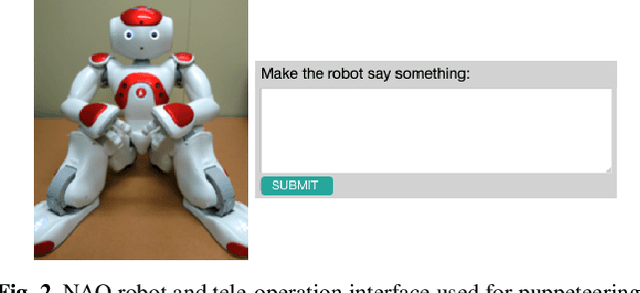

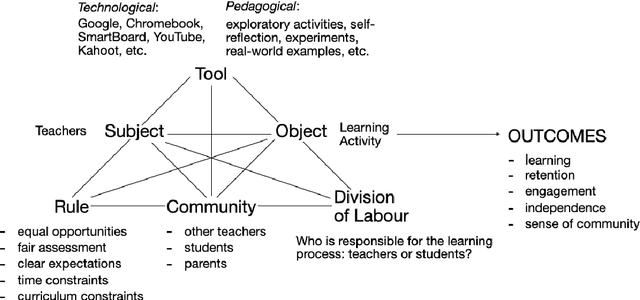
With advances in artificial intelligence, research is increasingly exploring the potential functions that social robots can play in education. As teachers are a critical stakeholder in the use and application of educational technologies, we conducted a study to understand teachers' perspectives on how a social robot could support a variety of learning activities in the classroom. Through interviews, robot puppeteering, and group brainstorming sessions with five elementary and middle school teachers from a local school in Canada, we take a socio-technical perspective to conceptualize possible robot functions and behaviours, and the effects they may have on the current way learning activities are designed, planned, and executed. Overall, the teachers responded positively to the idea of introducing a social robot as a technological tool for learning activities, envisioning differences in usage for teacher-robot and student-robot interactions. Further, Engestr\"om's Activity System Model -- a framework for analyzing human needs, tasks, and outcomes -- illustrated a number of tensions associated with learning activities in the classroom. We discuss the fine-grained robot functions and behaviours conceived by teachers, and how they address the current tensions -- providing suggestions for improving the design of social robots for learning activities.
Multi-Armed Bandits for Intelligent Tutoring Systems
Jun 19, 2015
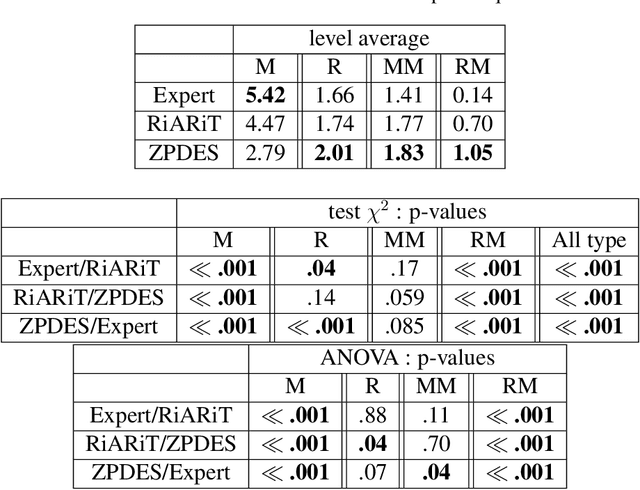
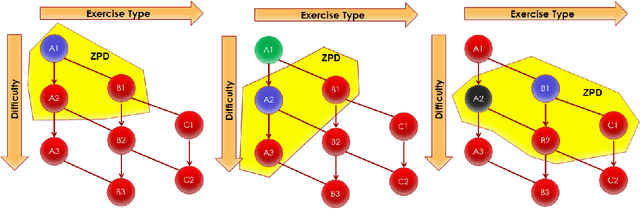
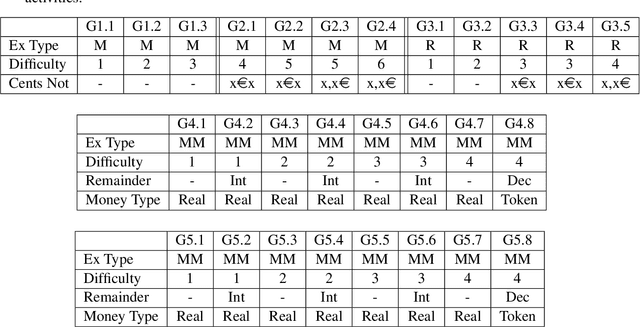
We present an approach to Intelligent Tutoring Systems which adaptively personalizes sequences of learning activities to maximize skills acquired by students, taking into account the limited time and motivational resources. At a given point in time, the system proposes to the students the activity which makes them progress faster. We introduce two algorithms that rely on the empirical estimation of the learning progress, RiARiT that uses information about the difficulty of each exercise and ZPDES that uses much less knowledge about the problem. The system is based on the combination of three approaches. First, it leverages recent models of intrinsically motivated learning by transposing them to active teaching, relying on empirical estimation of learning progress provided by specific activities to particular students. Second, it uses state-of-the-art Multi-Arm Bandit (MAB) techniques to efficiently manage the exploration/exploitation challenge of this optimization process. Third, it leverages expert knowledge to constrain and bootstrap initial exploration of the MAB, while requiring only coarse guidance information of the expert and allowing the system to deal with didactic gaps in its knowledge. The system is evaluated in a scenario where 7-8 year old schoolchildren learn how to decompose numbers while manipulating money. Systematic experiments are presented with simulated students, followed by results of a user study across a population of 400 school children.