 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow Can Everyday Users Efficiently Teach Robots by Demonstrations?
Paper and Code
Oct 19, 2023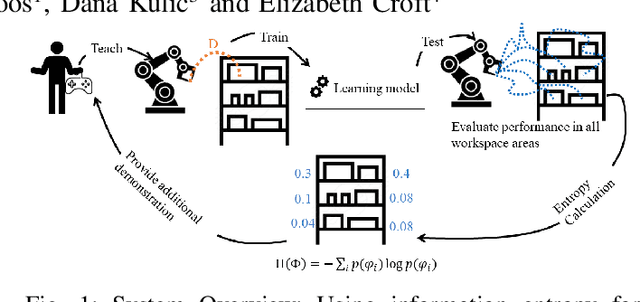
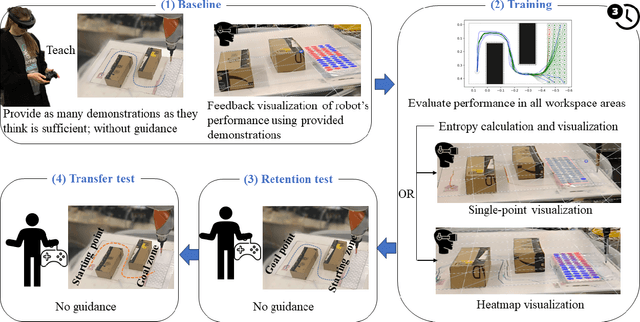
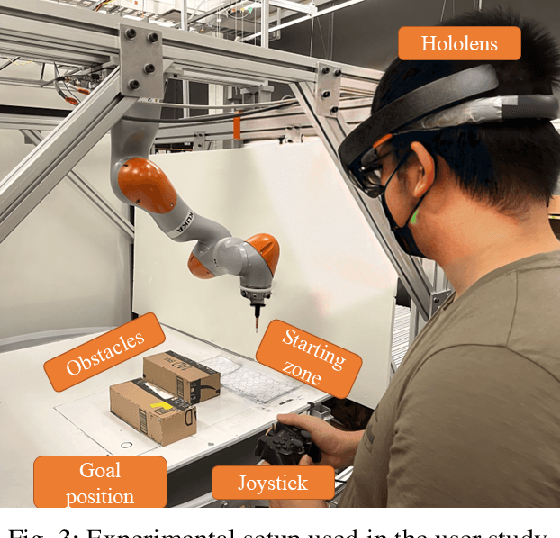
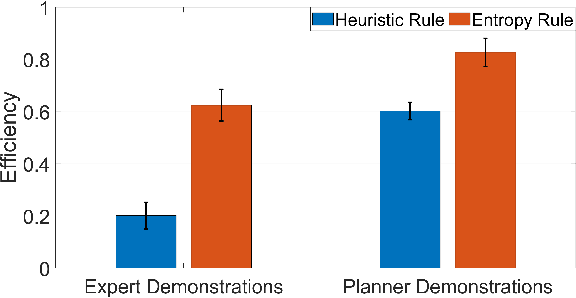
Learning from Demonstration (LfD) is a framework that allows lay users to easily program robots. However, the efficiency of robot learning and the robot's ability to generalize to task variations hinges upon the quality and quantity of the provided demonstrations. Our objective is to guide human teachers to furnish more effective demonstrations, thus facilitating efficient robot learning. To achieve this, we propose to use a measure of uncertainty, namely task-related information entropy, as a criterion for suggesting informative demonstration examples to human teachers to improve their teaching skills. In a conducted experiment (N=24), an augmented reality (AR)-based guidance system was employed to train novice users to produce additional demonstrations from areas with the highest entropy within the workspace. These novice users were trained for a few trials to teach the robot a generalizable task using a limited number of demonstrations. Subsequently, the users' performance after training was assessed first on the same task (retention) and then on a novel task (transfer) without guidance. The results indicated a substantial improvement in robot learning efficiency from the teacher's demonstrations, with an improvement of up to 198% observed on the novel task. Furthermore, the proposed approach was compared to a state-of-the-art heuristic rule and found to improve robot learning efficiency by 210% compared to the heuristic rule.