 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Communicate Functional States with Nonverbal Expressions for Improved Human-Robot Collaboration
Paper and Code
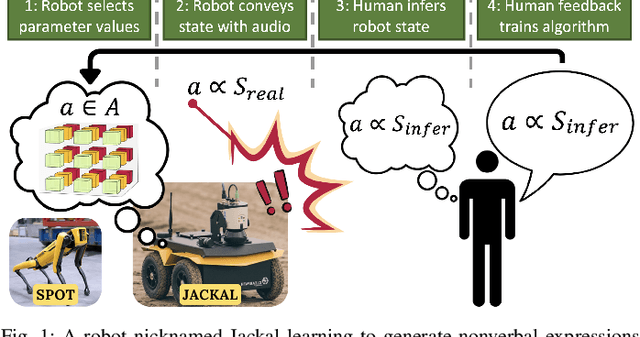
Collaborative robots must effectively communicate their internal state to humans to enable a smooth interaction. Nonverbal communication is widely used to communicate information during human-robot interaction, however, such methods may also be misunderstood, leading to communication errors. In this work, we explore modulating the acoustic parameter values (pitch bend, beats per minute, beats per loop) of nonverbal auditory expressions to convey functional robot states (accomplished, progressing, stuck). We propose a reinforcement learning (RL) algorithm based on noisy human feedback to produce accurately interpreted nonverbal auditory expressions. The proposed approach was evaluated through a user study with 24 participants. The results demonstrate that: 1. Our proposed RL-based approach is able to learn suitable acoustic parameter values which improve the users' ability to correctly identify the state of the robot. 2. Algorithm initialization informed by previous user data can be used to significantly speed up the learning process. 3. The method used for algorithm initialization strongly influences whether participants converge to similar sounds for each robot state. 4. Modulation of pitch bend has the largest influence on user association between sounds and robotic states.