 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Probabilistic Model for Skill Acquisition with Switching Latent Feedback Controllers
Oct 18, 2024



Manipulation tasks often consist of subtasks, each representing a distinct skill. Mastering these skills is essential for robots, as it enhances their autonomy, efficiency, adaptability, and ability to work in their environment. Learning from demonstrations allows robots to rapidly acquire new skills without starting from scratch, with demonstrations typically sequencing skills to achieve tasks. Behaviour cloning approaches to learning from demonstration commonly rely on mixture density network output heads to predict robot actions. In this work, we first reinterpret the mixture density network as a library of feedback controllers (or skills) conditioned on latent states. This arises from the observation that a one-layer linear network is functionally equivalent to a classical feedback controller, with network weights corresponding to controller gains. We use this insight to derive a probabilistic graphical model that combines these elements, describing the skill acquisition process as segmentation in a latent space, where each skill policy functions as a feedback control law in this latent space. Our approach significantly improves not only task success rate, but also robustness to observation noise when trained with human demonstrations. Our physical robot experiments further show that the induced robustness improves model deployment on robots.
D-PAGE: Diverse Paraphrase Generation
Aug 13, 2018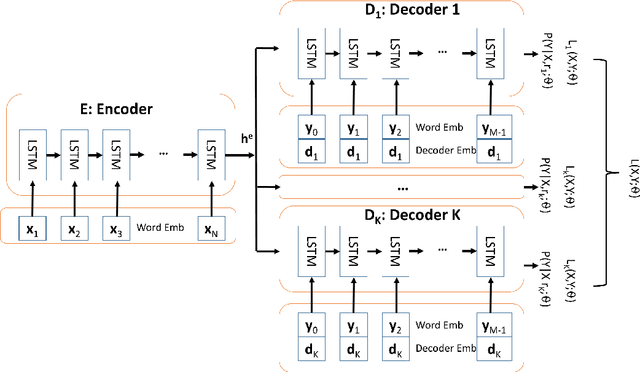
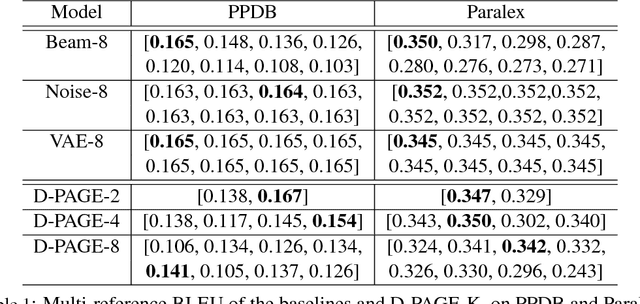
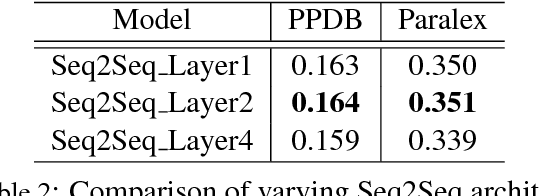
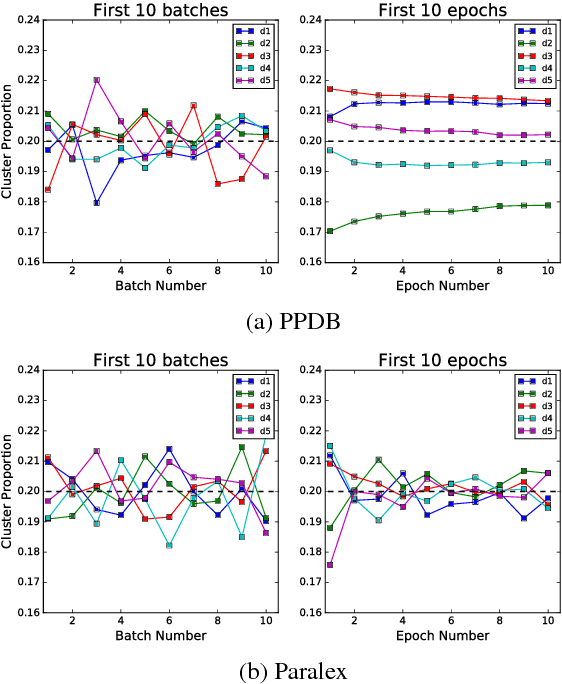
In this paper, we investigate the diversity aspect of paraphrase generation. Prior deep learning models employ either decoding methods or add random input noise for varying outputs. We propose a simple method Diverse Paraphrase Generation (D-PAGE), which extends neural machine translation (NMT) models to support the generation of diverse paraphrases with implicit rewriting patterns. Our experimental results on two real-world benchmark datasets demonstrate that our model generates at least one order of magnitude more diverse outputs than the baselines in terms of a new evaluation metric Jeffrey's Divergence. We have also conducted extensive experiments to understand various properties of our model with a focus on diversity.