 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStochastic Parameter Decomposition
Jun 25, 2025



A key step in reverse engineering neural networks is to decompose them into simpler parts that can be studied in relative isolation. Linear parameter decomposition -- a framework that has been proposed to resolve several issues with current decomposition methods -- decomposes neural network parameters into a sum of sparsely used vectors in parameter space. However, the current main method in this framework, Attribution-based Parameter Decomposition (APD), is impractical on account of its computational cost and sensitivity to hyperparameters. In this work, we introduce \textit{Stochastic Parameter Decomposition} (SPD), a method that is more scalable and robust to hyperparameters than APD, which we demonstrate by decomposing models that are slightly larger and more complex than was possible to decompose with APD. We also show that SPD avoids other issues, such as shrinkage of the learned parameters, and better identifies ground truth mechanisms in toy models. By bridging causal mediation analysis and network decomposition methods, this demonstration opens up new research possibilities in mechanistic interpretability by removing barriers to scaling linear parameter decomposition methods to larger models. We release a library for running SPD and reproducing our experiments at https://github.com/goodfire-ai/spd.
Parameterized Synthetic Text Generation with SimpleStories
Apr 12, 2025We present SimpleStories, a large synthetic story dataset in simple language, consisting of 2 million stories each in English and Japanese. Our method employs parametrization of prompts with features at multiple levels of abstraction, allowing for systematic control over story characteristics to ensure broad syntactic and semantic diversity. Building on and addressing limitations in the TinyStories dataset, our approach demonstrates that simplicity and variety can be achieved simultaneously in synthetic text generation at scale.
Interpretability in Parameter Space: Minimizing Mechanistic Description Length with Attribution-based Parameter Decomposition
Jan 24, 2025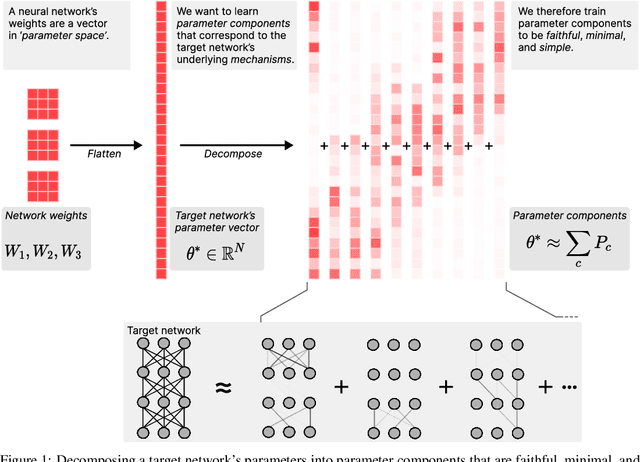
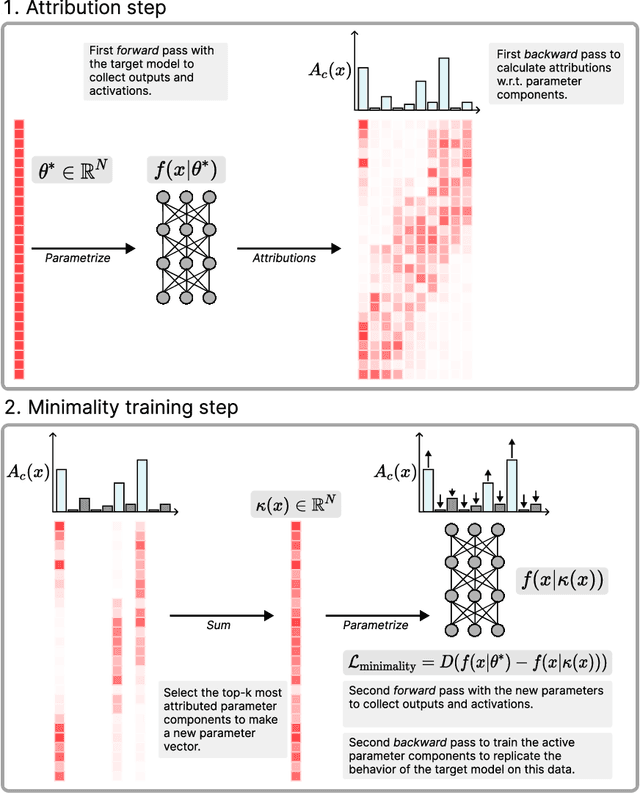
Mechanistic interpretability aims to understand the internal mechanisms learned by neural networks. Despite recent progress toward this goal, it remains unclear how best to decompose neural network parameters into mechanistic components. We introduce Attribution-based Parameter Decomposition (APD), a method that directly decomposes a neural network's parameters into components that (i) are faithful to the parameters of the original network, (ii) require a minimal number of components to process any input, and (iii) are maximally simple. Our approach thus optimizes for a minimal length description of the network's mechanisms. We demonstrate APD's effectiveness by successfully identifying ground truth mechanisms in multiple toy experimental settings: Recovering features from superposition; separating compressed computations; and identifying cross-layer distributed representations. While challenges remain to scaling APD to non-toy models, our results suggest solutions to several open problems in mechanistic interpretability, including identifying minimal circuits in superposition, offering a conceptual foundation for 'features', and providing an architecture-agnostic framework for neural network decomposition.
Towards evaluations-based safety cases for AI scheming
Nov 07, 2024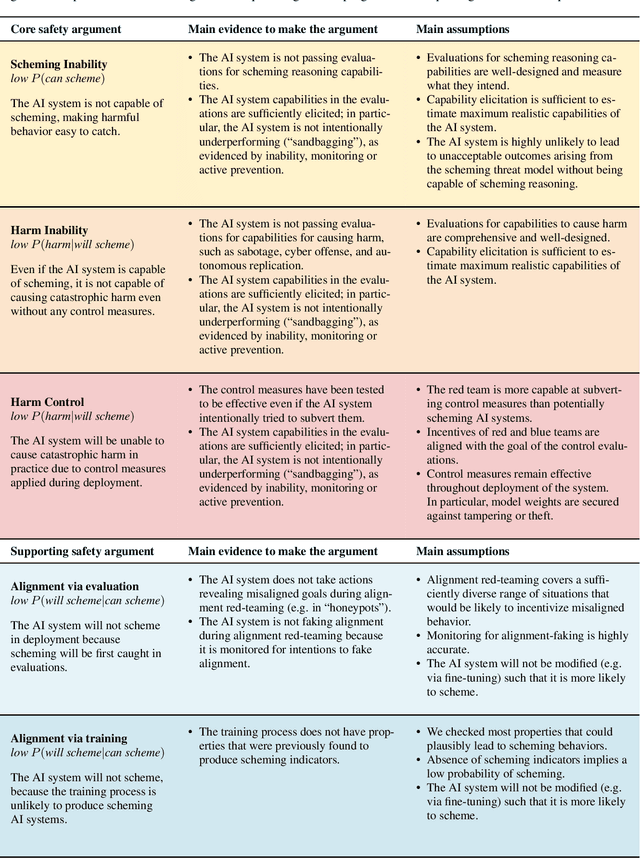
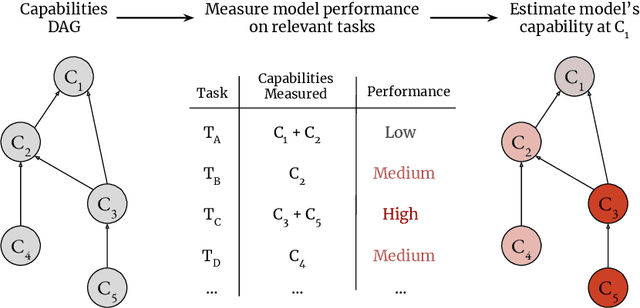
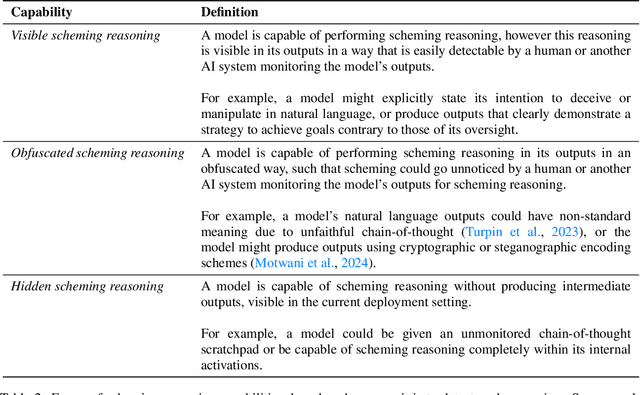
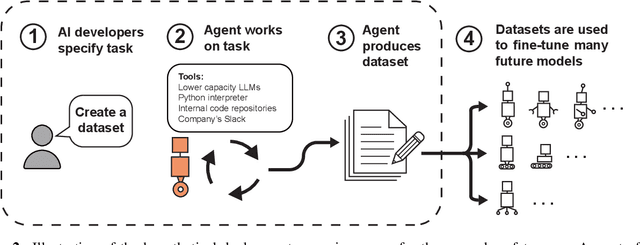
We sketch how developers of frontier AI systems could construct a structured rationale -- a 'safety case' -- that an AI system is unlikely to cause catastrophic outcomes through scheming. Scheming is a potential threat model where AI systems could pursue misaligned goals covertly, hiding their true capabilities and objectives. In this report, we propose three arguments that safety cases could use in relation to scheming. For each argument we sketch how evidence could be gathered from empirical evaluations, and what assumptions would need to be met to provide strong assurance. First, developers of frontier AI systems could argue that AI systems are not capable of scheming (Scheming Inability). Second, one could argue that AI systems are not capable of posing harm through scheming (Harm Inability). Third, one could argue that control measures around the AI systems would prevent unacceptable outcomes even if the AI systems intentionally attempted to subvert them (Harm Control). Additionally, we discuss how safety cases might be supported by evidence that an AI system is reasonably aligned with its developers (Alignment). Finally, we point out that many of the assumptions required to make these safety arguments have not been confidently satisfied to date and require making progress on multiple open research problems.
The Local Interaction Basis: Identifying Computationally-Relevant and Sparsely Interacting Features in Neural Networks
May 17, 2024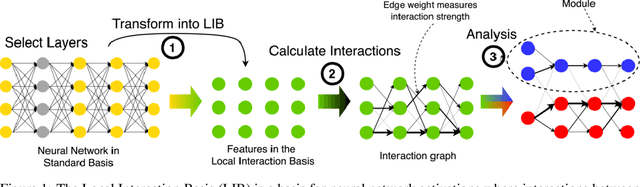
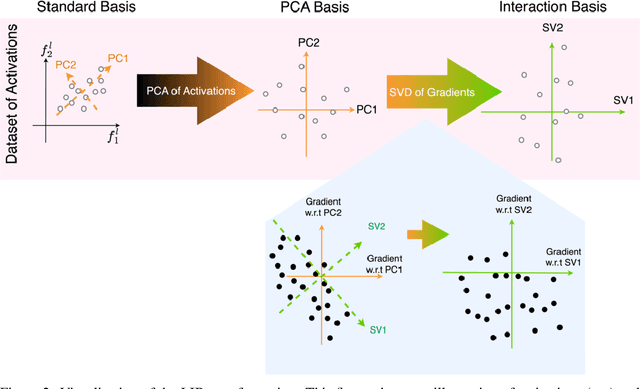
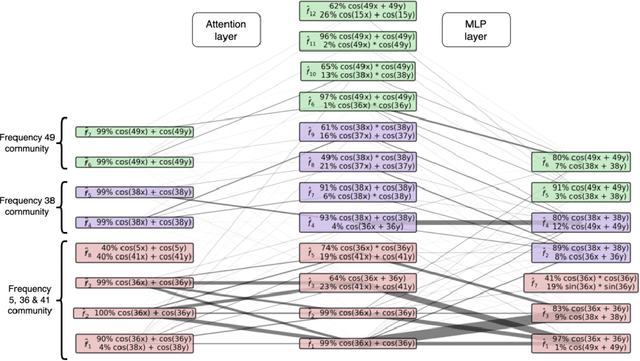
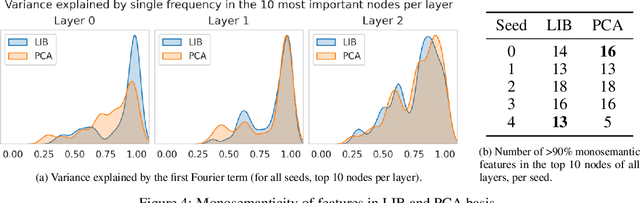
Mechanistic interpretability aims to understand the behavior of neural networks by reverse-engineering their internal computations. However, current methods struggle to find clear interpretations of neural network activations because a decomposition of activations into computational features is missing. Individual neurons or model components do not cleanly correspond to distinct features or functions. We present a novel interpretability method that aims to overcome this limitation by transforming the activations of the network into a new basis - the Local Interaction Basis (LIB). LIB aims to identify computational features by removing irrelevant activations and interactions. Our method drops irrelevant activation directions and aligns the basis with the singular vectors of the Jacobian matrix between adjacent layers. It also scales features based on their importance for downstream computation, producing an interaction graph that shows all computationally-relevant features and interactions in a model. We evaluate the effectiveness of LIB on modular addition and CIFAR-10 models, finding that it identifies more computationally-relevant features that interact more sparsely, compared to principal component analysis. However, LIB does not yield substantial improvements in interpretability or interaction sparsity when applied to language models. We conclude that LIB is a promising theory-driven approach for analyzing neural networks, but in its current form is not applicable to large language models.
Using Degeneracy in the Loss Landscape for Mechanistic Interpretability
May 17, 2024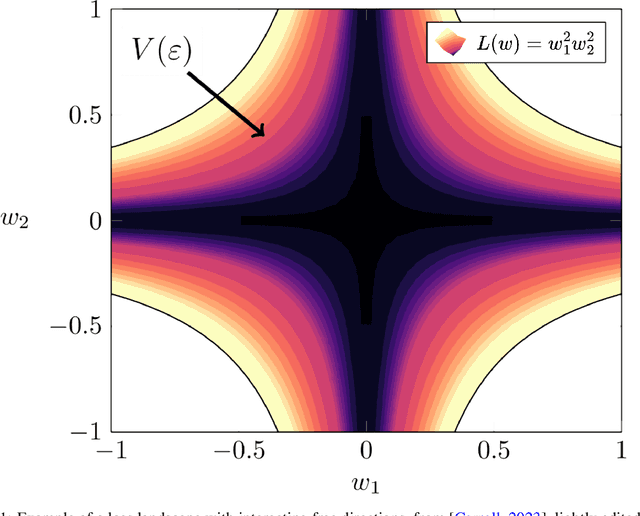
Mechanistic Interpretability aims to reverse engineer the algorithms implemented by neural networks by studying their weights and activations. An obstacle to reverse engineering neural networks is that many of the parameters inside a network are not involved in the computation being implemented by the network. These degenerate parameters may obfuscate internal structure. Singular learning theory teaches us that neural network parameterizations are biased towards being more degenerate, and parameterizations with more degeneracy are likely to generalize further. We identify 3 ways that network parameters can be degenerate: linear dependence between activations in a layer; linear dependence between gradients passed back to a layer; ReLUs which fire on the same subset of datapoints. We also present a heuristic argument that modular networks are likely to be more degenerate, and we develop a metric for identifying modules in a network that is based on this argument. We propose that if we can represent a neural network in a way that is invariant to reparameterizations that exploit the degeneracies, then this representation is likely to be more interpretable, and we provide some evidence that such a representation is likely to have sparser interactions. We introduce the Interaction Basis, a tractable technique to obtain a representation that is invariant to degeneracies from linear dependence of activations or Jacobians.
Identifying Functionally Important Features with End-to-End Sparse Dictionary Learning
May 17, 2024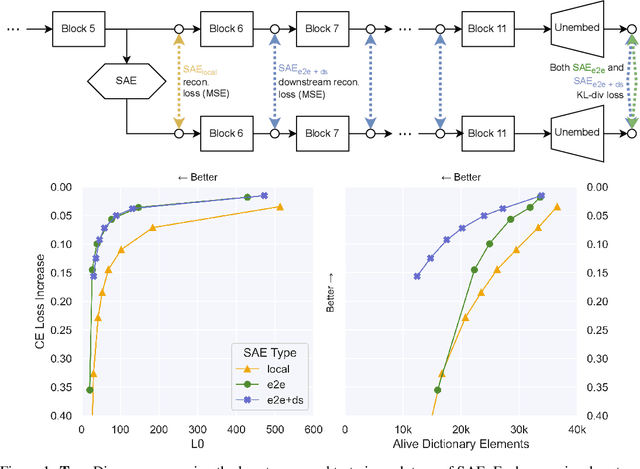

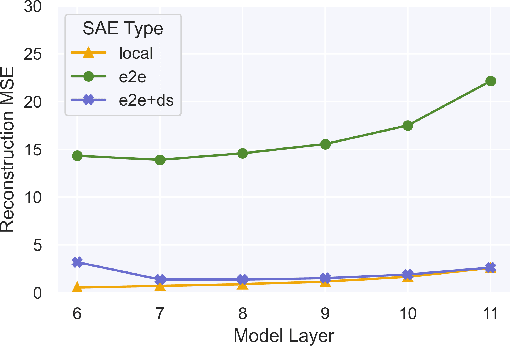
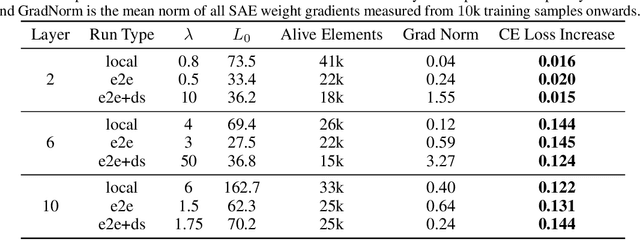
Identifying the features learned by neural networks is a core challenge in mechanistic interpretability. Sparse autoencoders (SAEs), which learn a sparse, overcomplete dictionary that reconstructs a network's internal activations, have been used to identify these features. However, SAEs may learn more about the structure of the datatset than the computational structure of the network. There is therefore only indirect reason to believe that the directions found in these dictionaries are functionally important to the network. We propose end-to-end (e2e) sparse dictionary learning, a method for training SAEs that ensures the features learned are functionally important by minimizing the KL divergence between the output distributions of the original model and the model with SAE activations inserted. Compared to standard SAEs, e2e SAEs offer a Pareto improvement: They explain more network performance, require fewer total features, and require fewer simultaneously active features per datapoint, all with no cost to interpretability. We explore geometric and qualitative differences between e2e SAE features and standard SAE features. E2e dictionary learning brings us closer to methods that can explain network behavior concisely and accurately. We release our library for training e2e SAEs and reproducing our analysis at https://github.com/ApolloResearch/e2e_sae
Interpreting Neural Networks through the Polytope Lens
Nov 22, 2022



Mechanistic interpretability aims to explain what a neural network has learned at a nuts-and-bolts level. What are the fundamental primitives of neural network representations? Previous mechanistic descriptions have used individual neurons or their linear combinations to understand the representations a network has learned. But there are clues that neurons and their linear combinations are not the correct fundamental units of description: directions cannot describe how neural networks use nonlinearities to structure their representations. Moreover, many instances of individual neurons and their combinations are polysemantic (i.e. they have multiple unrelated meanings). Polysemanticity makes interpreting the network in terms of neurons or directions challenging since we can no longer assign a specific feature to a neural unit. In order to find a basic unit of description that does not suffer from these problems, we zoom in beyond just directions to study the way that piecewise linear activation functions (such as ReLU) partition the activation space into numerous discrete polytopes. We call this perspective the polytope lens. The polytope lens makes concrete predictions about the behavior of neural networks, which we evaluate through experiments on both convolutional image classifiers and language models. Specifically, we show that polytopes can be used to identify monosemantic regions of activation space (while directions are not in general monosemantic) and that the density of polytope boundaries reflect semantic boundaries. We also outline a vision for what mechanistic interpretability might look like through the polytope lens.