 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysion: Evaluating Physical Prediction from Vision in Humans and Machines
Jun 17, 2021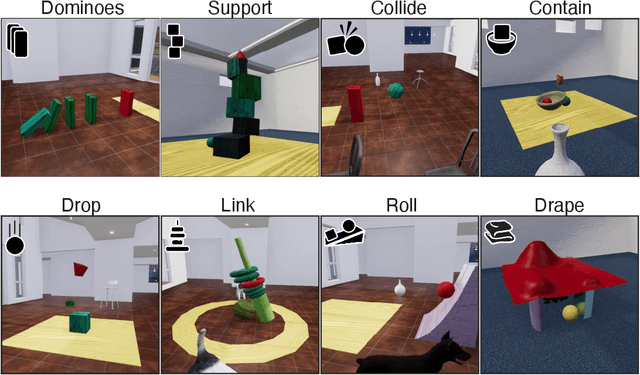
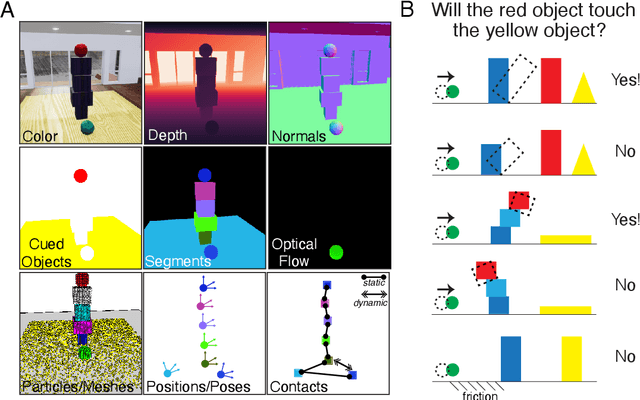
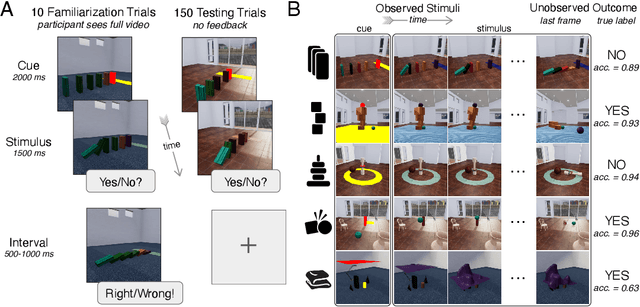
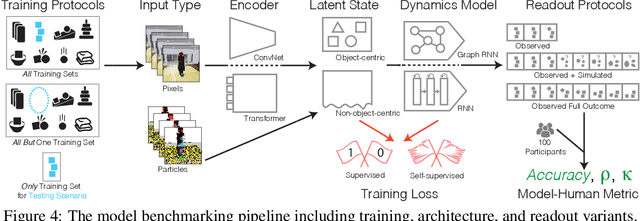
While machine learning algorithms excel at many challenging visual tasks, it is unclear that they can make predictions about commonplace real world physical events. Here, we present a visual and physical prediction benchmark that precisely measures this capability. In realistically simulating a wide variety of physical phenomena -- rigid and soft-body collisions, stable multi-object configurations, rolling and sliding, projectile motion -- our dataset presents a more comprehensive challenge than existing benchmarks. Moreover, we have collected human responses for our stimuli so that model predictions can be directly compared to human judgments. We compare an array of algorithms -- varying in their architecture, learning objective, input-output structure, and training data -- on their ability to make diverse physical predictions. We find that graph neural networks with access to the physical state best capture human behavior, whereas among models that receive only visual input, those with object-centric representations or pretraining do best but fall far short of human accuracy. This suggests that extracting physically meaningful representations of scenes is the main bottleneck to achieving human-like visual prediction. We thus demonstrate how our benchmark can identify areas for improvement and measure progress on this key aspect of physical understanding.
ThreeDWorld: A Platform for Interactive Multi-Modal Physical Simulation
Jul 09, 2020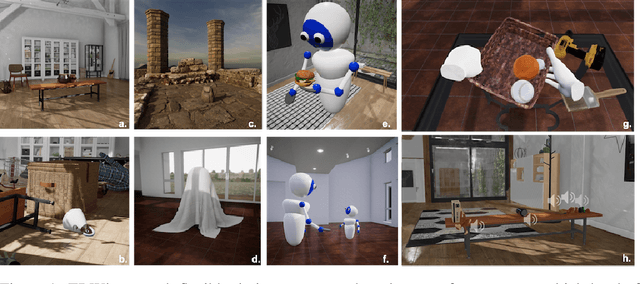
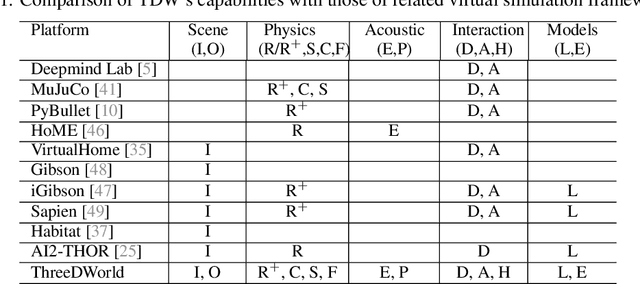

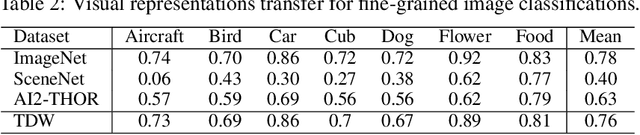
We introduce ThreeDWorld (TDW), a platform for interactive multi-modal physical simulation. With TDW, users can simulate high-fidelity sensory data and physical interactions between mobile agents and objects in a wide variety of rich 3D environments. TDW has several unique properties: 1) realtime near photo-realistic image rendering quality; 2) a library of objects and environments with materials for high-quality rendering, and routines enabling user customization of the asset library; 3) generative procedures for efficiently building classes of new environments 4) high-fidelity audio rendering; 5) believable and realistic physical interactions for a wide variety of material types, including cloths, liquid, and deformable objects; 6) a range of "avatar" types that serve as embodiments of AI agents, with the option for user avatar customization; and 7) support for human interactions with VR devices. TDW also provides a rich API enabling multiple agents to interact within a simulation and return a range of sensor and physics data representing the state of the world. We present initial experiments enabled by the platform around emerging research directions in computer vision, machine learning, and cognitive science, including multi-modal physical scene understanding, multi-agent interactions, models that "learn like a child", and attention studies in humans and neural networks. The simulation platform will be made publicly available.
Learning Physical Graph Representations from Visual Scenes
Jun 24, 2020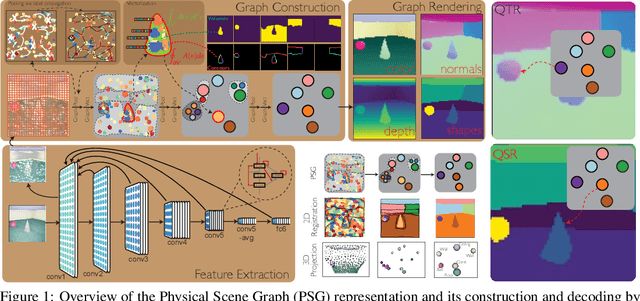
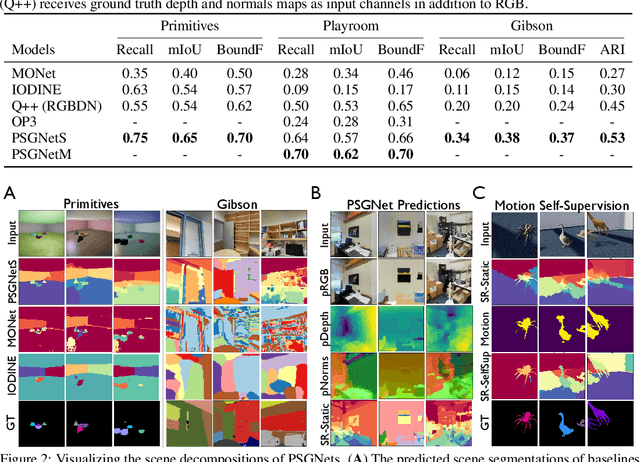
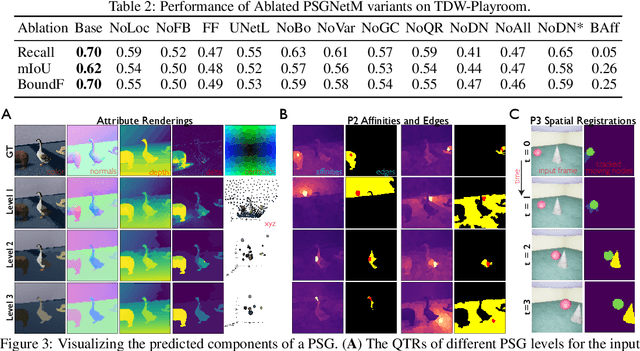

Convolutional Neural Networks (CNNs) have proved exceptional at learning representations for visual object categorization. However, CNNs do not explicitly encode objects, parts, and their physical properties, which has limited CNNs' success on tasks that require structured understanding of visual scenes. To overcome these limitations, we introduce the idea of Physical Scene Graphs (PSGs), which represent scenes as hierarchical graphs, with nodes in the hierarchy corresponding intuitively to object parts at different scales, and edges to physical connections between parts. Bound to each node is a vector of latent attributes that intuitively represent object properties such as surface shape and texture. We also describe PSGNet, a network architecture that learns to extract PSGs by reconstructing scenes through a PSG-structured bottleneck. PSGNet augments standard CNNs by including: recurrent feedback connections to combine low and high-level image information; graph pooling and vectorization operations that convert spatially-uniform feature maps into object-centric graph structures; and perceptual grouping principles to encourage the identification of meaningful scene elements. We show that PSGNet outperforms alternative self-supervised scene representation algorithms at scene segmentation tasks, especially on complex real-world images, and generalizes well to unseen object types and scene arrangements. PSGNet is also able learn from physical motion, enhancing scene estimates even for static images. We present a series of ablation studies illustrating the importance of each component of the PSGNet architecture, analyses showing that learned latent attributes capture intuitive scene properties, and illustrate the use of PSGs for compositional scene inference.
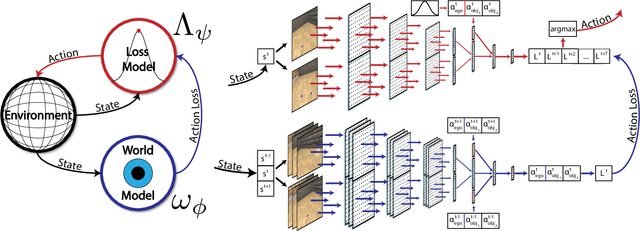
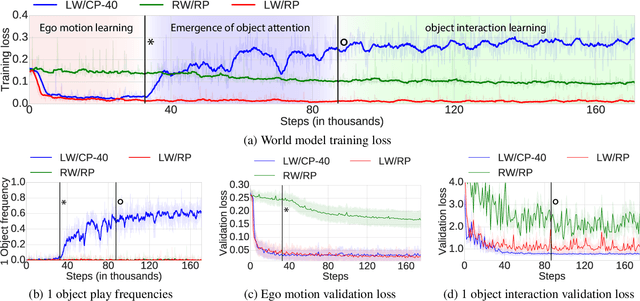
Learning to Play with Intrinsically-Motivated Self-Aware Agents
Oct 30, 2018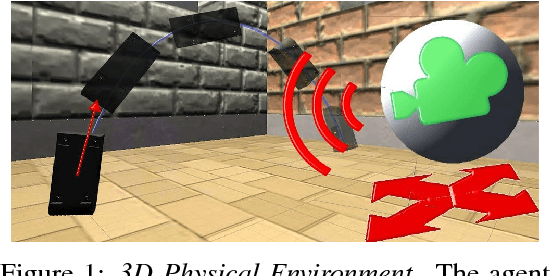
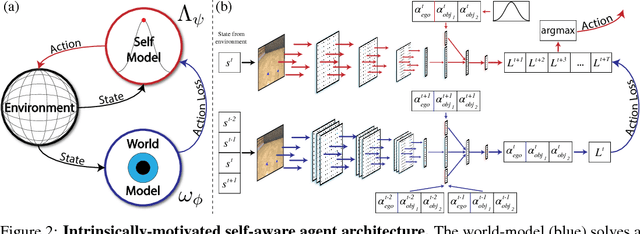
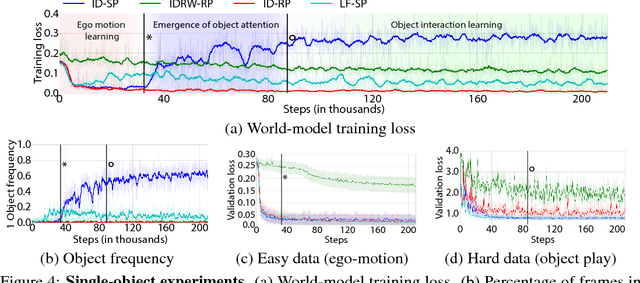
Infants are experts at playing, with an amazing ability to generate novel structured behaviors in unstructured environments that lack clear extrinsic reward signals. We seek to mathematically formalize these abilities using a neural network that implements curiosity-driven intrinsic motivation. Using a simple but ecologically naturalistic simulated environment in which an agent can move and interact with objects it sees, we propose a "world-model" network that learns to predict the dynamic consequences of the agent's actions. Simultaneously, we train a separate explicit "self-model" that allows the agent to track the error map of its own world-model, and then uses the self-model to adversarially challenge the developing world-model. We demonstrate that this policy causes the agent to explore novel and informative interactions with its environment, leading to the generation of a spectrum of complex behaviors, including ego-motion prediction, object attention, and object gathering. Moreover, the world-model that the agent learns supports improved performance on object dynamics prediction, detection, localization and recognition tasks. Taken together, our results are initial steps toward creating flexible autonomous agents that self-supervise in complex novel physical environments.
Flexible Neural Representation for Physics Prediction
Oct 27, 2018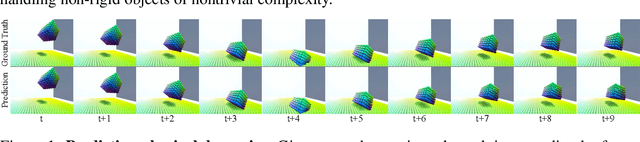
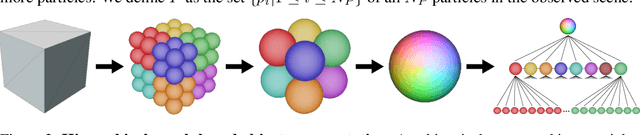
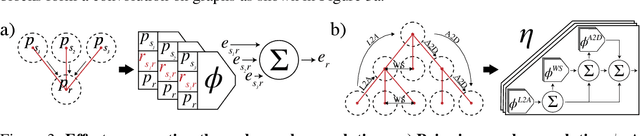
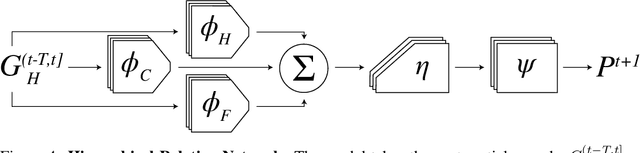
Humans have a remarkable capacity to understand the physical dynamics of objects in their environment, flexibly capturing complex structures and interactions at multiple levels of detail. Inspired by this ability, we propose a hierarchical particle-based object representation that covers a wide variety of types of three-dimensional objects, including both arbitrary rigid geometrical shapes and deformable materials. We then describe the Hierarchical Relation Network (HRN), an end-to-end differentiable neural network based on hierarchical graph convolution, that learns to predict physical dynamics in this representation. Compared to other neural network baselines, the HRN accurately handles complex collisions and nonrigid deformations, generating plausible dynamics predictions at long time scales in novel settings, and scaling to large scene configurations. These results demonstrate an architecture with the potential to form the basis of next-generation physics predictors for use in computer vision, robotics, and quantitative cognitive science.
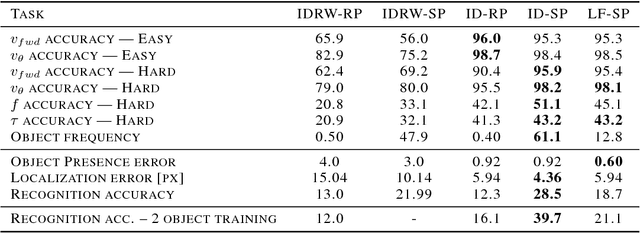
Emergence of Structured Behaviors from Curiosity-Based Intrinsic Motivation
Feb 21, 2018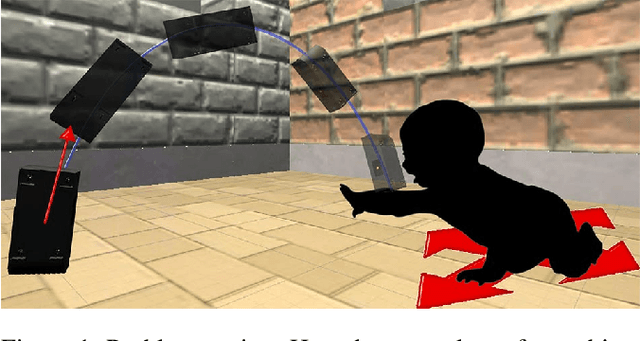
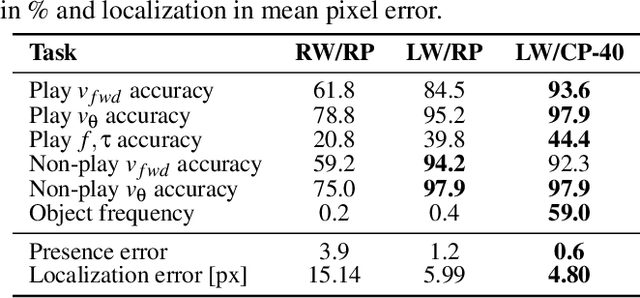
Infants are experts at playing, with an amazing ability to generate novel structured behaviors in unstructured environments that lack clear extrinsic reward signals. We seek to replicate some of these abilities with a neural network that implements curiosity-driven intrinsic motivation. Using a simple but ecologically naturalistic simulated environment in which the agent can move and interact with objects it sees, the agent learns a world model predicting the dynamic consequences of its actions. Simultaneously, the agent learns to take actions that adversarially challenge the developing world model, pushing the agent to explore novel and informative interactions with its environment. We demonstrate that this policy leads to the self-supervised emergence of a spectrum of complex behaviors, including ego motion prediction, object attention, and object gathering. Moreover, the world model that the agent learns supports improved performance on object dynamics prediction and localization tasks. Our results are a proof-of-principle that computational models of intrinsic motivation might account for key features of developmental visuomotor learning in infants.
Spatial Semantic Regularisation for Large Scale Object Detection
Oct 10, 2015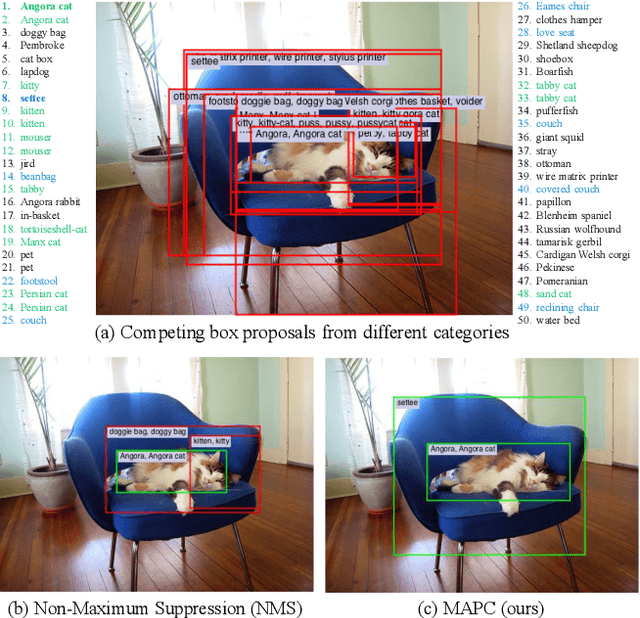

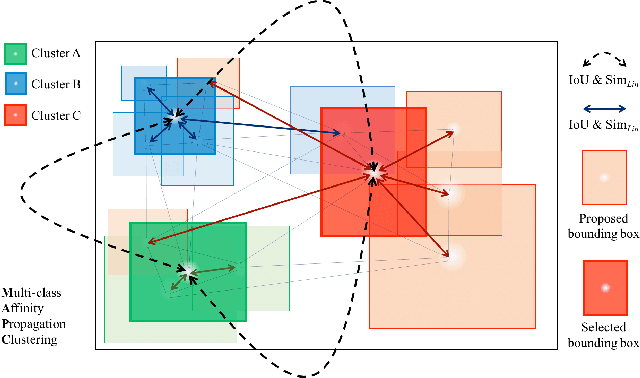
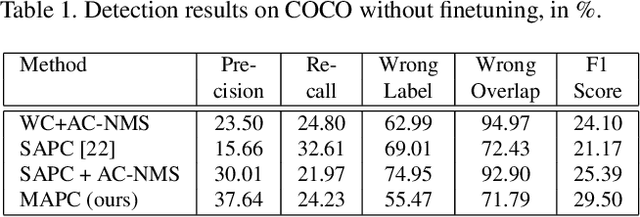
Large scale object detection with thousands of classes introduces the problem of many contradicting false positive detections, which have to be suppressed. Class-independent non-maximum suppression has traditionally been used for this step, but it does not scale well as the number of classes grows. Traditional non-maximum suppression does not consider label- and instance-level relationships nor does it allow an exploitation of the spatial layout of detection proposals. We propose a new multi-class spatial semantic regularisation method based on affinity propagation clustering, which simultaneously optimises across all categories and all proposed locations in the image, to improve both the localisation and categorisation of selected detection proposals. Constraints are shared across the labels through the semantic WordNet hierarchy. Our approach proves to be especially useful in large scale settings with thousands of classes, where spatial and semantic interactions are very frequent and only weakly supervised detectors can be built due to a lack of bounding box annotations. Detection experiments are conducted on the ImageNet and COCO dataset, and in settings with thousands of detected categories. Our method provides a significant precision improvement by reducing false positives, while simultaneously improving the recall.