 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVision CNNs trained to estimate spatial latents learned similar ventral-stream-aligned representations
Dec 12, 2024



Studies of the functional role of the primate ventral visual stream have traditionally focused on object categorization, often ignoring -- despite much prior evidence -- its role in estimating "spatial" latents such as object position and pose. Most leading ventral stream models are derived by optimizing networks for object categorization, which seems to imply that the ventral stream is also derived under such an objective. Here, we explore an alternative hypothesis: Might the ventral stream be optimized for estimating spatial latents? And a closely related question: How different -- if at all -- are representations learned from spatial latent estimation compared to categorization? To ask these questions, we leveraged synthetic image datasets generated by a 3D graphic engine and trained convolutional neural networks (CNNs) to estimate different combinations of spatial and category latents. We found that models trained to estimate just a few spatial latents achieve neural alignment scores comparable to those trained on hundreds of categories, and the spatial latent performance of models strongly correlates with their neural alignment. Spatial latent and category-trained models have very similar -- but not identical -- internal representations, especially in their early and middle layers. We provide evidence that this convergence is partly driven by non-target latent variability in the training data, which facilitates the implicit learning of representations of those non-target latents. Taken together, these results suggest that many training objectives, such as spatial latents, can lead to similar models aligned neurally with the ventral stream. Thus, one should not assume that the ventral stream is optimized for object categorization only. As a field, we need to continue to sharpen our measures of comparing models to brains to better understand the functional roles of the ventral stream.
Finding Fallen Objects Via Asynchronous Audio-Visual Integration
Jul 07, 2022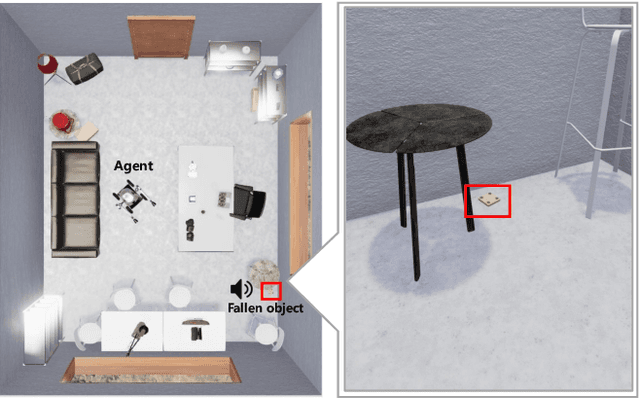
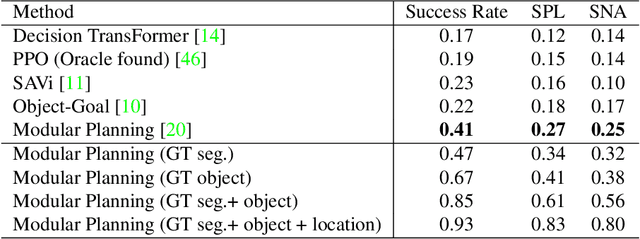
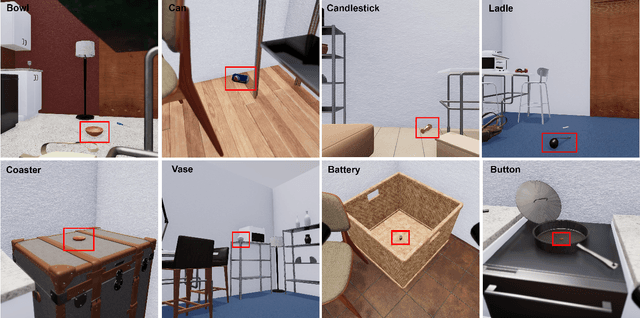
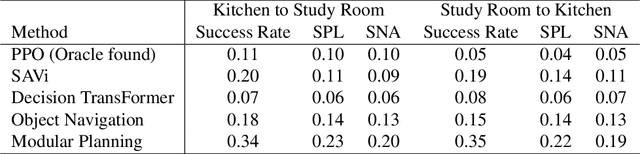
The way an object looks and sounds provide complementary reflections of its physical properties. In many settings cues from vision and audition arrive asynchronously but must be integrated, as when we hear an object dropped on the floor and then must find it. In this paper, we introduce a setting in which to study multi-modal object localization in 3D virtual environments. An object is dropped somewhere in a room. An embodied robot agent, equipped with a camera and microphone, must determine what object has been dropped -- and where -- by combining audio and visual signals with knowledge of the underlying physics. To study this problem, we have generated a large-scale dataset -- the Fallen Objects dataset -- that includes 8000 instances of 30 physical object categories in 64 rooms. The dataset uses the ThreeDWorld platform which can simulate physics-based impact sounds and complex physical interactions between objects in a photorealistic setting. As a first step toward addressing this challenge, we develop a set of embodied agent baselines, based on imitation learning, reinforcement learning, and modular planning, and perform an in-depth analysis of the challenge of this new task.
The ThreeDWorld Transport Challenge: A Visually Guided Task-and-Motion Planning Benchmark for Physically Realistic Embodied AI
Mar 25, 2021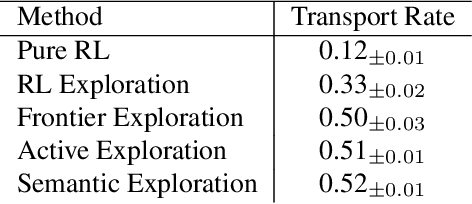
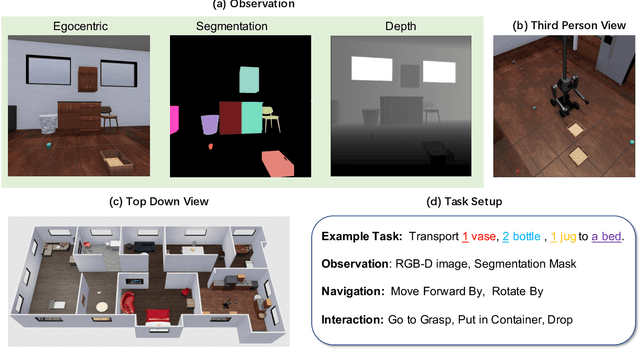
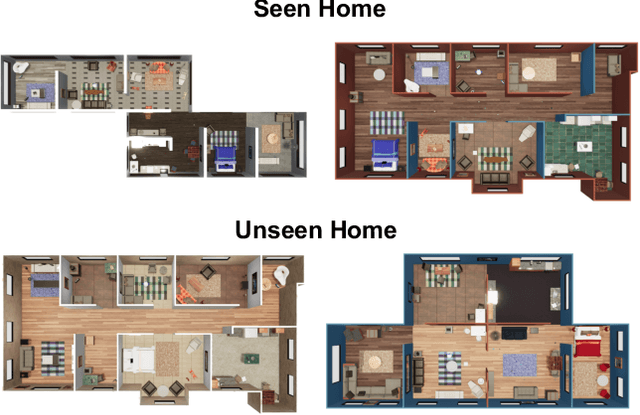
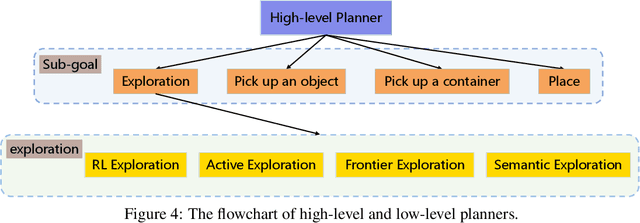
We introduce a visually-guided and physics-driven task-and-motion planning benchmark, which we call the ThreeDWorld Transport Challenge. In this challenge, an embodied agent equipped with two 9-DOF articulated arms is spawned randomly in a simulated physical home environment. The agent is required to find a small set of objects scattered around the house, pick them up, and transport them to a desired final location. We also position containers around the house that can be used as tools to assist with transporting objects efficiently. To complete the task, an embodied agent must plan a sequence of actions to change the state of a large number of objects in the face of realistic physical constraints. We build this benchmark challenge using the ThreeDWorld simulation: a virtual 3D environment where all objects respond to physics, and where can be controlled using fully physics-driven navigation and interaction API. We evaluate several existing agents on this benchmark. Experimental results suggest that: 1) a pure RL model struggles on this challenge; 2) hierarchical planning-based agents can transport some objects but still far from solving this task. We anticipate that this benchmark will empower researchers to develop more intelligent physics-driven robots for the physical world.
ThreeDWorld: A Platform for Interactive Multi-Modal Physical Simulation
Jul 09, 2020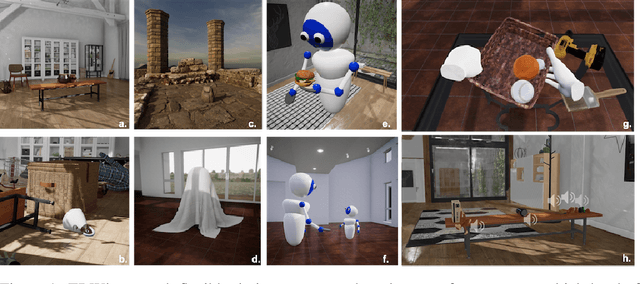
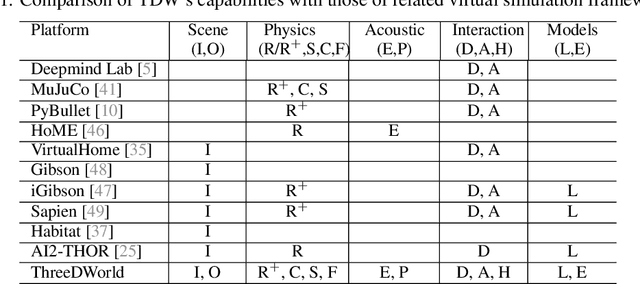

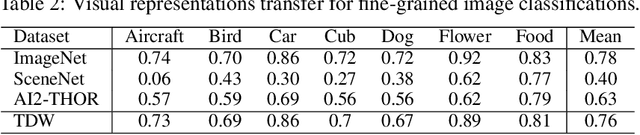
We introduce ThreeDWorld (TDW), a platform for interactive multi-modal physical simulation. With TDW, users can simulate high-fidelity sensory data and physical interactions between mobile agents and objects in a wide variety of rich 3D environments. TDW has several unique properties: 1) realtime near photo-realistic image rendering quality; 2) a library of objects and environments with materials for high-quality rendering, and routines enabling user customization of the asset library; 3) generative procedures for efficiently building classes of new environments 4) high-fidelity audio rendering; 5) believable and realistic physical interactions for a wide variety of material types, including cloths, liquid, and deformable objects; 6) a range of "avatar" types that serve as embodiments of AI agents, with the option for user avatar customization; and 7) support for human interactions with VR devices. TDW also provides a rich API enabling multiple agents to interact within a simulation and return a range of sensor and physics data representing the state of the world. We present initial experiments enabled by the platform around emerging research directions in computer vision, machine learning, and cognitive science, including multi-modal physical scene understanding, multi-agent interactions, models that "learn like a child", and attention studies in humans and neural networks. The simulation platform will be made publicly available.
Learning Physical Graph Representations from Visual Scenes
Jun 24, 2020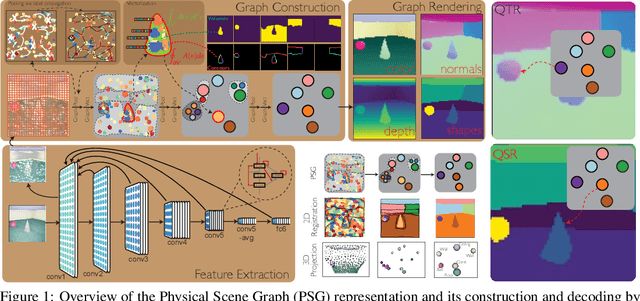
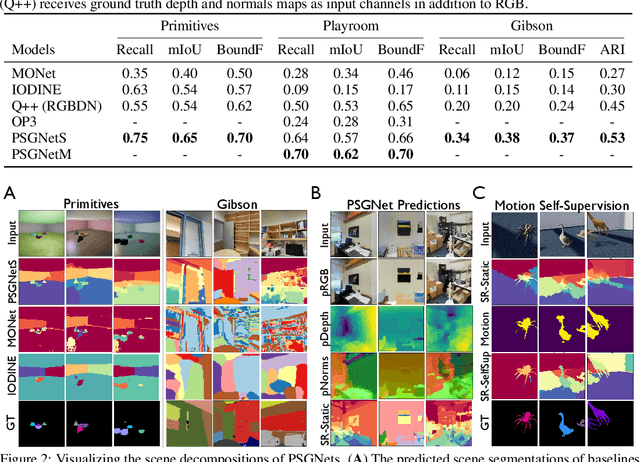
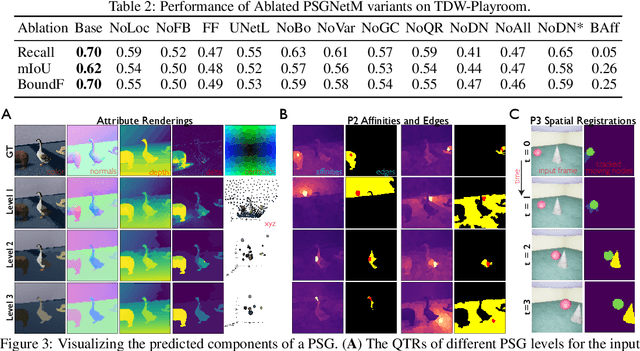

Convolutional Neural Networks (CNNs) have proved exceptional at learning representations for visual object categorization. However, CNNs do not explicitly encode objects, parts, and their physical properties, which has limited CNNs' success on tasks that require structured understanding of visual scenes. To overcome these limitations, we introduce the idea of Physical Scene Graphs (PSGs), which represent scenes as hierarchical graphs, with nodes in the hierarchy corresponding intuitively to object parts at different scales, and edges to physical connections between parts. Bound to each node is a vector of latent attributes that intuitively represent object properties such as surface shape and texture. We also describe PSGNet, a network architecture that learns to extract PSGs by reconstructing scenes through a PSG-structured bottleneck. PSGNet augments standard CNNs by including: recurrent feedback connections to combine low and high-level image information; graph pooling and vectorization operations that convert spatially-uniform feature maps into object-centric graph structures; and perceptual grouping principles to encourage the identification of meaningful scene elements. We show that PSGNet outperforms alternative self-supervised scene representation algorithms at scene segmentation tasks, especially on complex real-world images, and generalizes well to unseen object types and scene arrangements. PSGNet is also able learn from physical motion, enhancing scene estimates even for static images. We present a series of ablation studies illustrating the importance of each component of the PSGNet architecture, analyses showing that learned latent attributes capture intuitive scene properties, and illustrate the use of PSGs for compositional scene inference.