 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysion: Evaluating Physical Prediction from Vision in Humans and Machines
Jun 17, 2021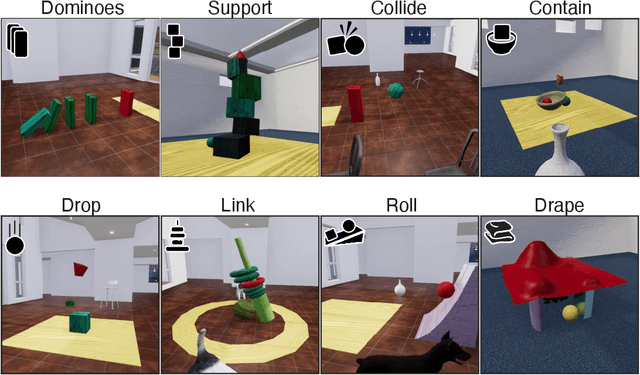
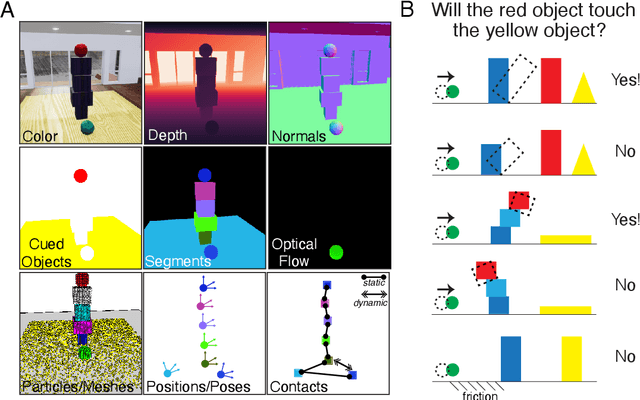
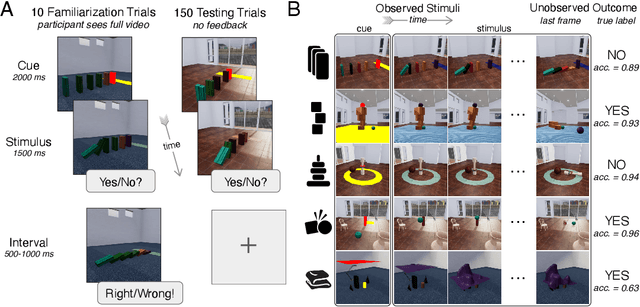
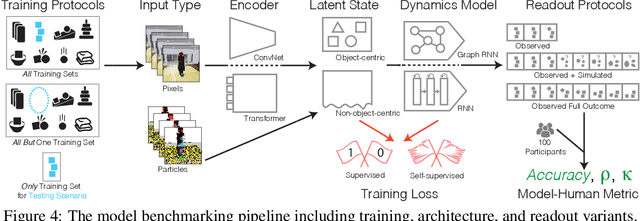
While machine learning algorithms excel at many challenging visual tasks, it is unclear that they can make predictions about commonplace real world physical events. Here, we present a visual and physical prediction benchmark that precisely measures this capability. In realistically simulating a wide variety of physical phenomena -- rigid and soft-body collisions, stable multi-object configurations, rolling and sliding, projectile motion -- our dataset presents a more comprehensive challenge than existing benchmarks. Moreover, we have collected human responses for our stimuli so that model predictions can be directly compared to human judgments. We compare an array of algorithms -- varying in their architecture, learning objective, input-output structure, and training data -- on their ability to make diverse physical predictions. We find that graph neural networks with access to the physical state best capture human behavior, whereas among models that receive only visual input, those with object-centric representations or pretraining do best but fall far short of human accuracy. This suggests that extracting physically meaningful representations of scenes is the main bottleneck to achieving human-like visual prediction. We thus demonstrate how our benchmark can identify areas for improvement and measure progress on this key aspect of physical understanding.
ThreeDWorld: A Platform for Interactive Multi-Modal Physical Simulation
Jul 09, 2020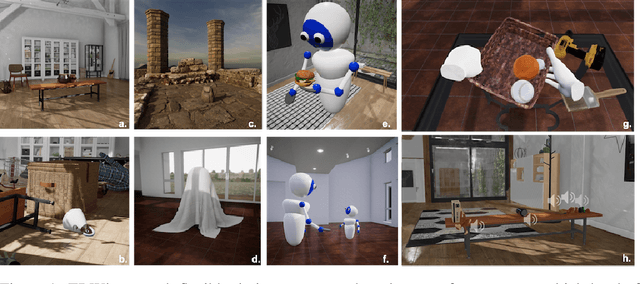
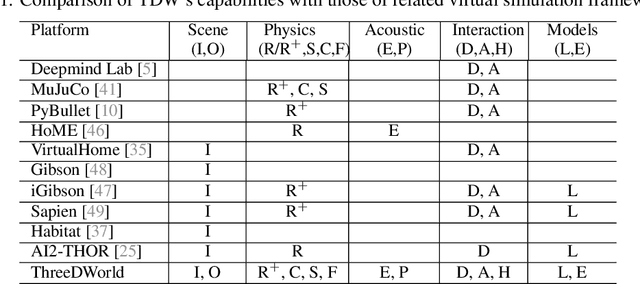

We introduce ThreeDWorld (TDW), a platform for interactive multi-modal physical simulation. With TDW, users can simulate high-fidelity sensory data and physical interactions between mobile agents and objects in a wide variety of rich 3D environments. TDW has several unique properties: 1) realtime near photo-realistic image rendering quality; 2) a library of objects and environments with materials for high-quality rendering, and routines enabling user customization of the asset library; 3) generative procedures for efficiently building classes of new environments 4) high-fidelity audio rendering; 5) believable and realistic physical interactions for a wide variety of material types, including cloths, liquid, and deformable objects; 6) a range of "avatar" types that serve as embodiments of AI agents, with the option for user avatar customization; and 7) support for human interactions with VR devices. TDW also provides a rich API enabling multiple agents to interact within a simulation and return a range of sensor and physics data representing the state of the world. We present initial experiments enabled by the platform around emerging research directions in computer vision, machine learning, and cognitive science, including multi-modal physical scene understanding, multi-agent interactions, models that "learn like a child", and attention studies in humans and neural networks. The simulation platform will be made publicly available.
Flexible Neural Representation for Physics Prediction
Oct 27, 2018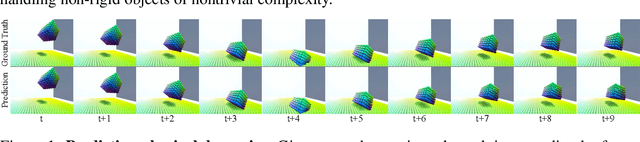
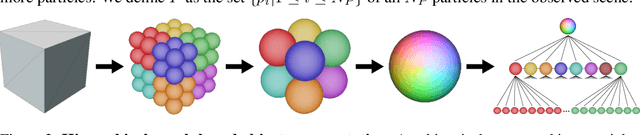
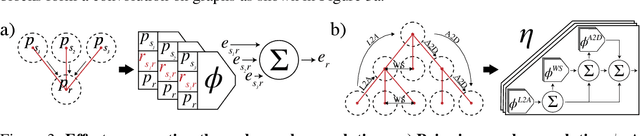
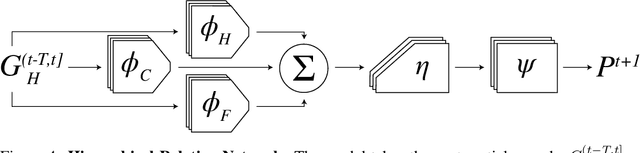
Humans have a remarkable capacity to understand the physical dynamics of objects in their environment, flexibly capturing complex structures and interactions at multiple levels of detail. Inspired by this ability, we propose a hierarchical particle-based object representation that covers a wide variety of types of three-dimensional objects, including both arbitrary rigid geometrical shapes and deformable materials. We then describe the Hierarchical Relation Network (HRN), an end-to-end differentiable neural network based on hierarchical graph convolution, that learns to predict physical dynamics in this representation. Compared to other neural network baselines, the HRN accurately handles complex collisions and nonrigid deformations, generating plausible dynamics predictions at long time scales in novel settings, and scaling to large scene configurations. These results demonstrate an architecture with the potential to form the basis of next-generation physics predictors for use in computer vision, robotics, and quantitative cognitive science.