 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVidi: Large Multimodal Models for Video Understanding and Editing
Apr 22, 2025



Humans naturally share information with those they are connected to, and video has become one of the dominant mediums for communication and expression on the Internet. To support the creation of high-quality large-scale video content, a modern pipeline requires a comprehensive understanding of both the raw input materials (e.g., the unedited footage captured by cameras) and the editing components (e.g., visual effects). In video editing scenarios, models must process multiple modalities (e.g., vision, audio, text) with strong background knowledge and handle flexible input lengths (e.g., hour-long raw videos), which poses significant challenges for traditional models. In this report, we introduce Vidi, a family of Large Multimodal Models (LMMs) for a wide range of video understand editing scenarios. The first release focuses on temporal retrieval, i.e., identifying the time ranges within the input videos corresponding to a given text query, which plays a critical role in intelligent editing. The model is capable of processing hour-long videos with strong temporal understanding capability, e.g., retrieve time ranges for certain queries. To support a comprehensive evaluation in real-world scenarios, we also present the VUE-TR benchmark, which introduces five key advancements. 1) Video duration: significantly longer than existing temporal retrival datasets, 2) Audio support: includes audio-based queries, 3) Query format: diverse query lengths/formats, 4) Annotation quality: ground-truth time ranges are manually annotated. 5) Evaluation metric: a refined IoU metric to support evaluation over multiple time ranges. Remarkably, Vidi significantly outperforms leading proprietary models, e.g., GPT-4o and Gemini, on the temporal retrieval task, indicating its superiority in video editing scenarios.
Where do Large Vision-Language Models Look at when Answering Questions?
Mar 18, 2025Large Vision-Language Models (LVLMs) have shown promising performance in vision-language understanding and reasoning tasks. However, their visual understanding behaviors remain underexplored. A fundamental question arises: to what extent do LVLMs rely on visual input, and which image regions contribute to their responses? It is non-trivial to interpret the free-form generation of LVLMs due to their complicated visual architecture (e.g., multiple encoders and multi-resolution) and variable-length outputs. In this paper, we extend existing heatmap visualization methods (e.g., iGOS++) to support LVLMs for open-ended visual question answering. We propose a method to select visually relevant tokens that reflect the relevance between generated answers and input image. Furthermore, we conduct a comprehensive analysis of state-of-the-art LVLMs on benchmarks designed to require visual information to answer. Our findings offer several insights into LVLM behavior, including the relationship between focus region and answer correctness, differences in visual attention across architectures, and the impact of LLM scale on visual understanding. The code and data are available at https://github.com/bytedance/LVLM_Interpretation.
Rethinking Homogeneity of Vision and Text Tokens in Large Vision-and-Language Models
Feb 04, 2025



Large vision-and-language models (LVLMs) typically treat visual and textual embeddings as homogeneous inputs to a large language model (LLM). However, these inputs are inherently different: visual inputs are multi-dimensional and contextually rich, often pre-encoded by models like CLIP, while textual inputs lack this structure. In this paper, we propose Decomposed Attention (D-Attn), a novel method that processes visual and textual embeddings differently by decomposing the 1-D causal self-attention in LVLMs. After the attention decomposition, D-Attn diagonalizes visual-to-visual self-attention, reducing computation from $\mathcal{O}(|V|^2)$ to $\mathcal{O}(|V|)$ for $|V|$ visual embeddings without compromising performance. Moreover, D-Attn debiases positional encodings in textual-to-visual cross-attention, further enhancing visual understanding. Finally, we introduce an $\alpha$-weighting strategy to merge visual and textual information, maximally preserving the pre-trained LLM's capabilities with minimal modifications. Extensive experiments and rigorous analyses validate the effectiveness of D-Attn, demonstrating significant improvements on multiple image benchmarks while significantly reducing computational costs. Code, data, and models will be publicly available.
Beyond Raw Videos: Understanding Edited Videos with Large Multimodal Model
Jun 15, 2024



The emerging video LMMs (Large Multimodal Models) have achieved significant improvements on generic video understanding in the form of VQA (Visual Question Answering), where the raw videos are captured by cameras. However, a large portion of videos in real-world applications are edited videos, \textit{e.g.}, users usually cut and add effects/modifications to the raw video before publishing it on social media platforms. The edited videos usually have high view counts but they are not covered in existing benchmarks of video LMMs, \textit{i.e.}, ActivityNet-QA, or VideoChatGPT benchmark. In this paper, we leverage the edited videos on a popular short video platform, \textit{i.e.}, TikTok, and build a video VQA benchmark (named EditVid-QA) covering four typical editing categories, i.e., effect, funny, meme, and game. Funny and meme videos benchmark nuanced understanding and high-level reasoning, while effect and game evaluate the understanding capability of artificial design. Most of the open-source video LMMs perform poorly on the EditVid-QA benchmark, indicating a huge domain gap between edited short videos on social media and regular raw videos. To improve the generalization ability of LMMs, we collect a training set for the proposed benchmark based on both Panda-70M/WebVid raw videos and small-scale TikTok/CapCut edited videos, which boosts the performance on the proposed EditVid-QA benchmark, indicating the effectiveness of high-quality training data. We also identified a serious issue in the existing evaluation protocol using the GPT-3.5 judge, namely a "sorry" attack, where a sorry-style naive answer can achieve an extremely high rating from the GPT judge, e.g., over 4.3 for correctness score on VideoChatGPT evaluation protocol. To avoid the "sorry" attacks, we evaluate results with GPT-4 judge and keyword filtering. The datasets will be released for academic purposes only.
CuMo: Scaling Multimodal LLM with Co-Upcycled Mixture-of-Experts
May 09, 2024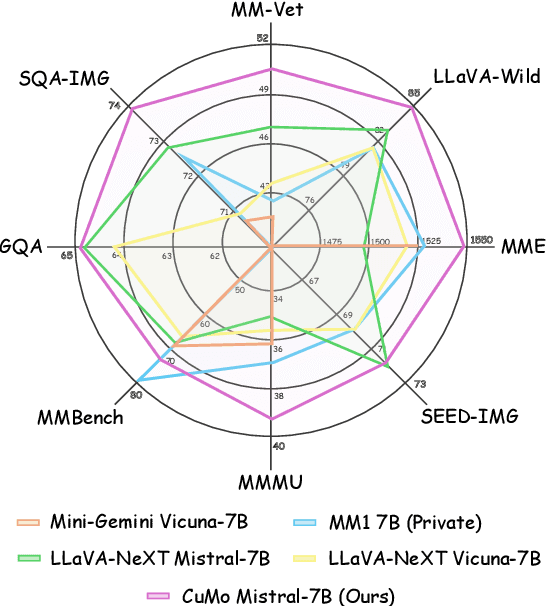
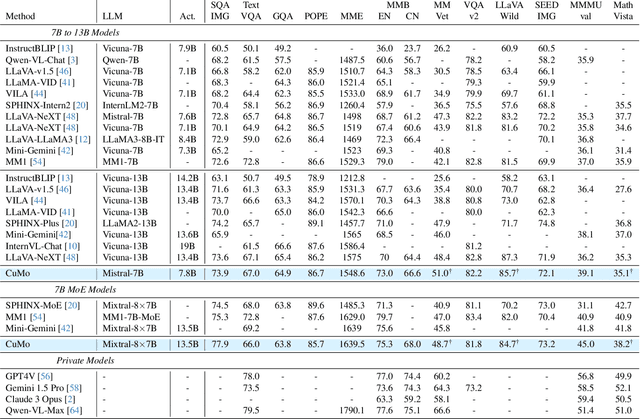
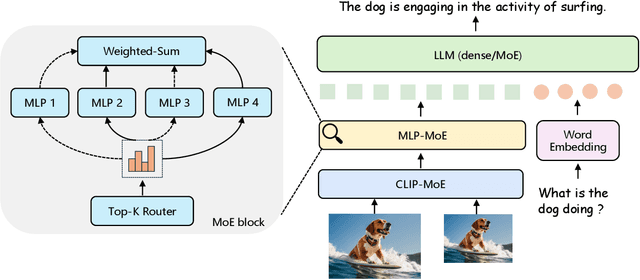
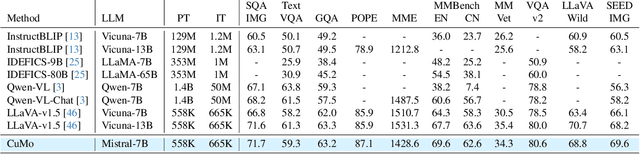
Recent advancements in Multimodal Large Language Models (LLMs) have focused primarily on scaling by increasing text-image pair data and enhancing LLMs to improve performance on multimodal tasks. However, these scaling approaches are computationally expensive and overlook the significance of improving model capabilities from the vision side. Inspired by the successful applications of Mixture-of-Experts (MoE) in LLMs, which improves model scalability during training while keeping inference costs similar to those of smaller models, we propose CuMo. CuMo incorporates Co-upcycled Top-K sparsely-gated Mixture-of-experts blocks into both the vision encoder and the MLP connector, thereby enhancing the multimodal LLMs with minimal additional activated parameters during inference. CuMo first pre-trains the MLP blocks and then initializes each expert in the MoE block from the pre-trained MLP block during the visual instruction tuning stage. Auxiliary losses are used to ensure a balanced loading of experts. CuMo outperforms state-of-the-art multimodal LLMs across various VQA and visual-instruction-following benchmarks using models within each model size group, all while training exclusively on open-sourced datasets. The code and model weights for CuMo are open-sourced at https://github.com/SHI-Labs/CuMo.
HAAV: Hierarchical Aggregation of Augmented Views for Image Captioning
May 25, 2023


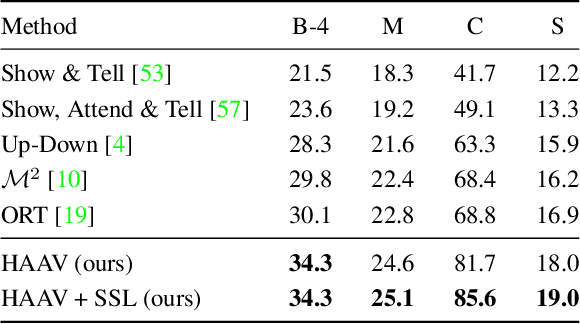
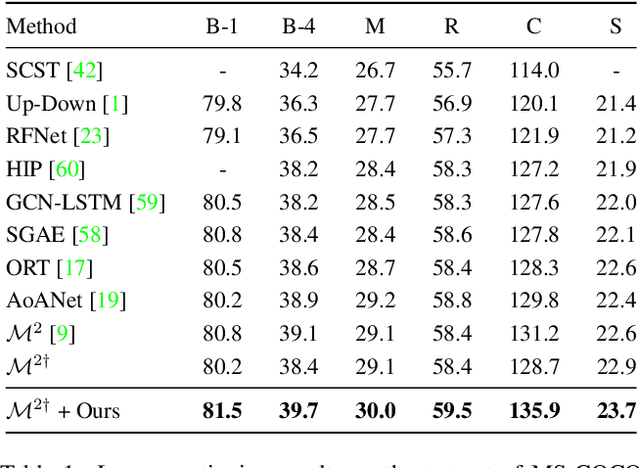
A great deal of progress has been made in image captioning, driven by research into how to encode the image using pre-trained models. This includes visual encodings (e.g. image grid features or detected objects) and more recently textual encodings (e.g. image tags or text descriptions of image regions). As more advanced encodings are available and incorporated, it is natural to ask: how to efficiently and effectively leverage the heterogeneous set of encodings? In this paper, we propose to regard the encodings as augmented views of the input image. The image captioning model encodes each view independently with a shared encoder efficiently, and a contrastive loss is incorporated across the encoded views in a novel way to improve their representation quality and the model's data efficiency. Our proposed hierarchical decoder then adaptively weighs the encoded views according to their effectiveness for caption generation by first aggregating within each view at the token level, and then across views at the view level. We demonstrate significant performance improvements of +5.6% CIDEr on MS-COCO and +12.9% CIDEr on Flickr30k compared to state of the arts, and conduct rigorous analyses to demonstrate the importance of each part of our design.
CLIP-GCD: Simple Language Guided Generalized Category Discovery
May 17, 2023
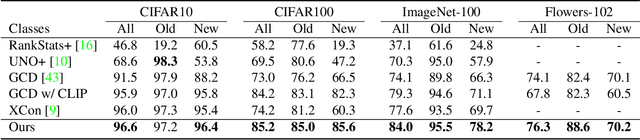

Generalized Category Discovery (GCD) requires a model to both classify known categories and cluster unknown categories in unlabeled data. Prior methods leveraged self-supervised pre-training combined with supervised fine-tuning on the labeled data, followed by simple clustering methods. In this paper, we posit that such methods are still prone to poor performance on out-of-distribution categories, and do not leverage a key ingredient: Semantic relationships between object categories. We therefore propose to leverage multi-modal (vision and language) models, in two complementary ways. First, we establish a strong baseline by replacing uni-modal features with CLIP, inspired by its zero-shot performance. Second, we propose a novel retrieval-based mechanism that leverages CLIP's aligned vision-language representations by mining text descriptions from a text corpus for the labeled and unlabeled set. We specifically use the alignment between CLIP's visual encoding of the image and textual encoding of the corpus to retrieve top-k relevant pieces of text and incorporate their embeddings to perform joint image+text semi-supervised clustering. We perform rigorous experimentation and ablations (including on where to retrieve from, how much to retrieve, and how to combine information), and validate our results on several datasets including out-of-distribution domains, demonstrating state-of-art results.
Structure-Encoding Auxiliary Tasks for Improved Visual Representation in Vision-and-Language Navigation
Nov 20, 2022



In Vision-and-Language Navigation (VLN), researchers typically take an image encoder pre-trained on ImageNet without fine-tuning on the environments that the agent will be trained or tested on. However, the distribution shift between the training images from ImageNet and the views in the navigation environments may render the ImageNet pre-trained image encoder suboptimal. Therefore, in this paper, we design a set of structure-encoding auxiliary tasks (SEA) that leverage the data in the navigation environments to pre-train and improve the image encoder. Specifically, we design and customize (1) 3D jigsaw, (2) traversability prediction, and (3) instance classification to pre-train the image encoder. Through rigorous ablations, our SEA pre-trained features are shown to better encode structural information of the scenes, which ImageNet pre-trained features fail to properly encode but is crucial for the target navigation task. The SEA pre-trained features can be easily plugged into existing VLN agents without any tuning. For example, on Test-Unseen environments, the VLN agents combined with our SEA pre-trained features achieve absolute success rate improvement of 12% for Speaker-Follower, 5% for Env-Dropout, and 4% for AuxRN.
Beyond a Pre-Trained Object Detector: Cross-Modal Textual and Visual Context for Image Captioning
May 09, 2022
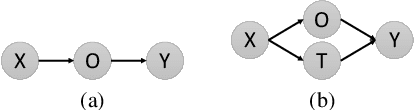
Significant progress has been made on visual captioning, largely relying on pre-trained features and later fixed object detectors that serve as rich inputs to auto-regressive models. A key limitation of such methods, however, is that the output of the model is conditioned only on the object detector's outputs. The assumption that such outputs can represent all necessary information is unrealistic, especially when the detector is transferred across datasets. In this work, we reason about the graphical model induced by this assumption, and propose to add an auxiliary input to represent missing information such as object relationships. We specifically propose to mine attributes and relationships from the Visual Genome dataset and condition the captioning model on them. Crucially, we propose (and show to be important) the use of a multi-modal pre-trained model (CLIP) to retrieve such contextual descriptions. Further, object detector models are frozen and do not have sufficient richness to allow the captioning model to properly ground them. As a result, we propose to condition both the detector and description outputs on the image, and show qualitatively and quantitatively that this can improve grounding. We validate our method on image captioning, perform thorough analyses of each component and importance of the pre-trained multi-modal model, and demonstrate significant improvements over the current state of the art, specifically +7.5% in CIDEr and +1.3% in BLEU-4 metrics.
Unbiased Teacher for Semi-Supervised Object Detection
Feb 18, 2021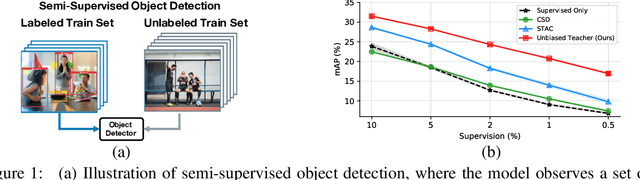



Semi-supervised learning, i.e., training networks with both labeled and unlabeled data, has made significant progress recently. However, existing works have primarily focused on image classification tasks and neglected object detection which requires more annotation effort. In this work, we revisit the Semi-Supervised Object Detection (SS-OD) and identify the pseudo-labeling bias issue in SS-OD. To address this, we introduce Unbiased Teacher, a simple yet effective approach that jointly trains a student and a gradually progressing teacher in a mutually-beneficial manner. Together with a class-balance loss to downweight overly confident pseudo-labels, Unbiased Teacher consistently improved state-of-the-art methods by significant margins on COCO-standard, COCO-additional, and VOC datasets. Specifically, Unbiased Teacher achieves 6.8 absolute mAP improvements against state-of-the-art method when using 1% of labeled data on MS-COCO, achieves around 10 mAP improvements against the supervised baseline when using only 0.5, 1, 2% of labeled data on MS-COCO.