 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraph Neural Networks for Resource Allocation in Multi-Channel Wireless Networks
Jun 04, 2025As the number of mobile devices continues to grow, interference has become a major bottleneck in improving data rates in wireless networks. Efficient joint channel and power allocation (JCPA) is crucial for managing interference. In this paper, we first propose an enhanced WMMSE (eWMMSE) algorithm to solve the JCPA problem in multi-channel wireless networks. To reduce the computational complexity of iterative optimization, we further introduce JCPGNN-M, a graph neural network-based solution that enables simultaneous multi-channel allocation for each user. We reformulate the problem as a Lagrangian function, which allows us to enforce the total power constraints systematically. Our solution involves combining this Lagrangian framework with GNNs and iteratively updating the Lagrange multipliers and resource allocation scheme. Unlike existing GNN-based methods that limit each user to a single channel, JCPGNN-M supports efficient spectrum reuse and scales well in dense network scenarios. Simulation results show that JCPGNN-M achieves better data rate compared to eWMMSE. Meanwhile, the inference time of JCPGNN-M is much lower than eWMMS, and it can generalize well to larger networks.
Aligning Task- and Reconstruction-Oriented Communications for Edge Intelligence
Feb 21, 2025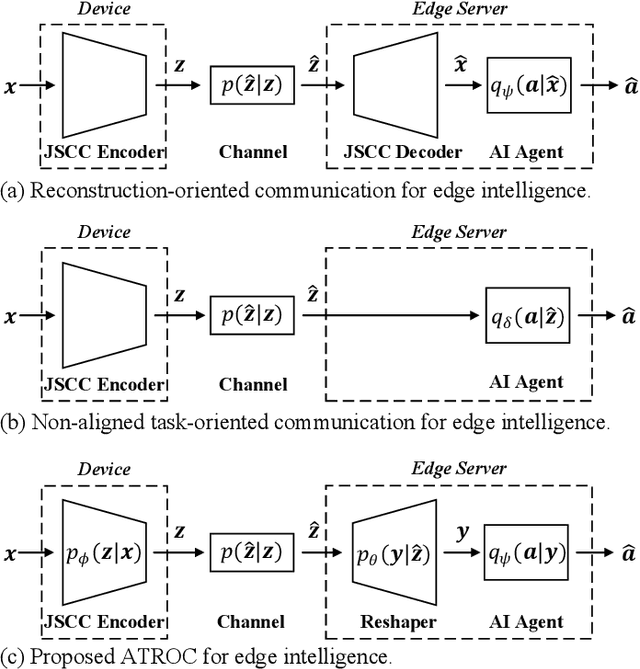
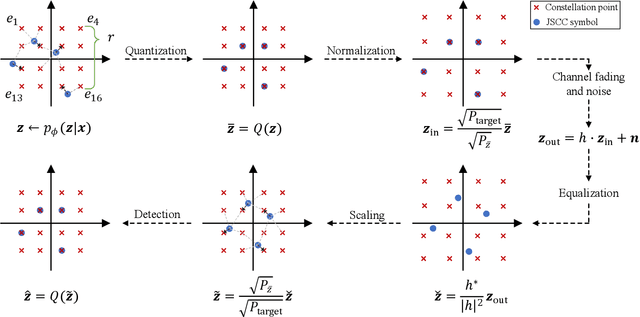
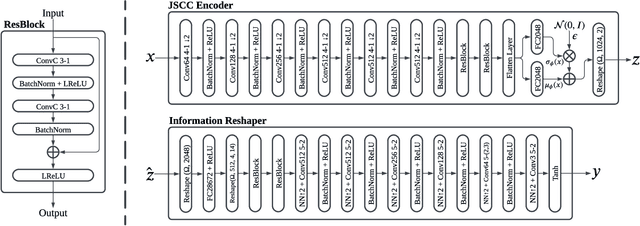
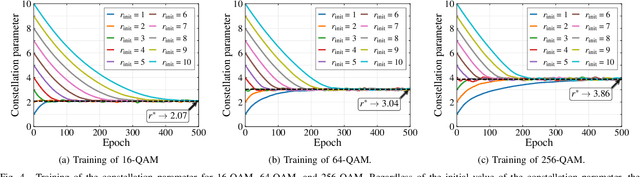
Existing communication systems aim to reconstruct the information at the receiver side, and are known as reconstruction-oriented communications. This approach often falls short in meeting the real-time, task-specific demands of modern AI-driven applications such as autonomous driving and semantic segmentation. As a new design principle, task-oriented communications have been developed. However, it typically requires joint optimization of encoder, decoder, and modified inference neural networks, resulting in extensive cross-system redesigns and compatibility issues. This paper proposes a novel communication framework that aligns reconstruction-oriented and task-oriented communications for edge intelligence. The idea is to extend the Information Bottleneck (IB) theory to optimize data transmission by minimizing task-relevant loss function, while maintaining the structure of the original data by an information reshaper. Such an approach integrates task-oriented communications with reconstruction-oriented communications, where a variational approach is designed to handle the intractability of mutual information in high-dimensional neural network features. We also introduce a joint source-channel coding (JSCC) modulation scheme compatible with classical modulation techniques, enabling the deployment of AI technologies within existing digital infrastructures. The proposed framework is particularly effective in edge-based autonomous driving scenarios. Our evaluation in the Car Learning to Act (CARLA) simulator demonstrates that the proposed framework significantly reduces bits per service by 99.19% compared to existing methods, such as JPEG, JPEG2000, and BPG, without compromising the effectiveness of task execution.
GNN-based Auto-Encoder for Short Linear Block Codes: A DRL Approach
Dec 03, 2024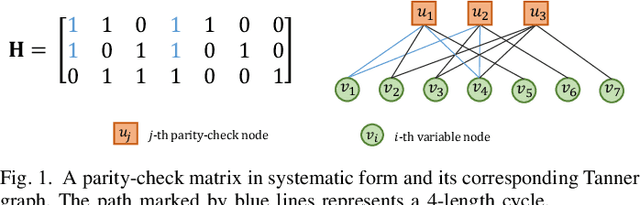
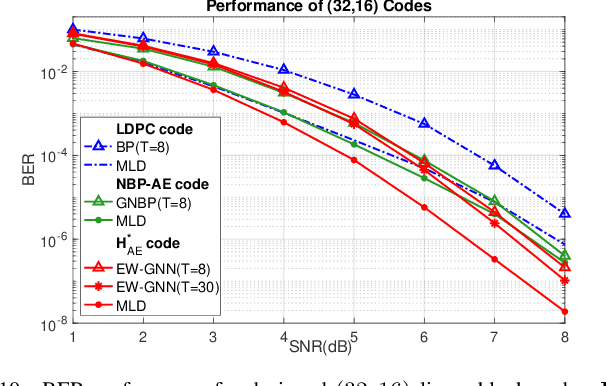
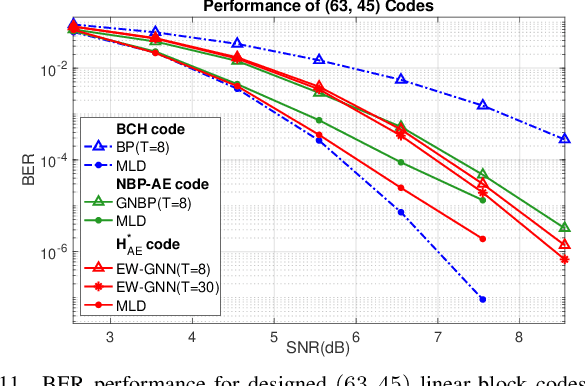
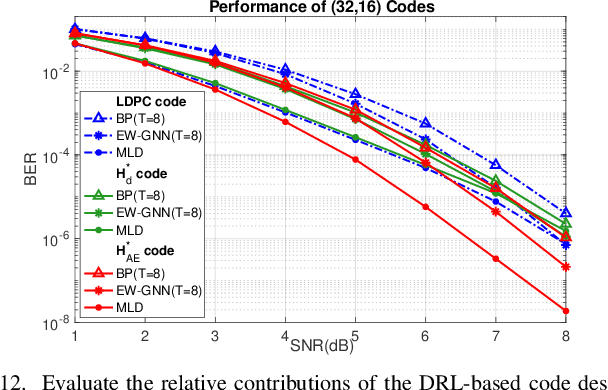
This paper presents a novel auto-encoder based end-to-end channel encoding and decoding. It integrates deep reinforcement learning (DRL) and graph neural networks (GNN) in code design by modeling the generation of code parity-check matrices as a Markov Decision Process (MDP), to optimize key coding performance metrics such as error-rates and code algebraic properties. An edge-weighted GNN (EW-GNN) decoder is proposed, which operates on the Tanner graph with an iterative message-passing structure. Once trained on a single linear block code, the EW-GNN decoder can be directly used to decode other linear block codes of different code lengths and code rates. An iterative joint training of the DRL-based code designer and the EW-GNN decoder is performed to optimize the end-end encoding and decoding process. Simulation results show the proposed auto-encoder significantly surpasses several traditional coding schemes at short block lengths, including low-density parity-check (LDPC) codes with the belief propagation (BP) decoding and the maximum-likelihood decoding (MLD), and BCH with BP decoding, offering superior error-correction capabilities while maintaining low decoding complexity.
Timeliness-Fidelity Tradeoff in 3D Scene Representations
Jul 23, 2024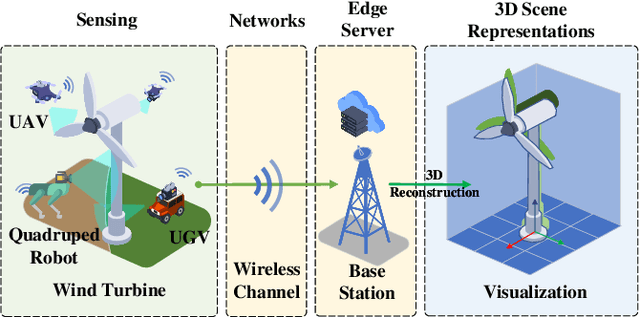
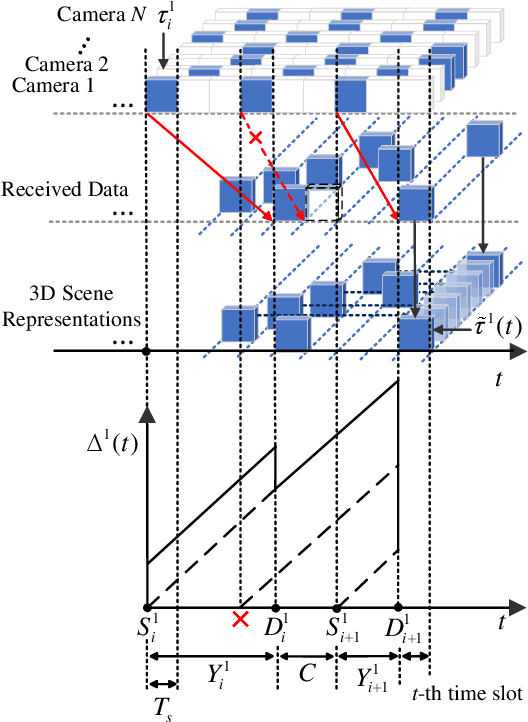
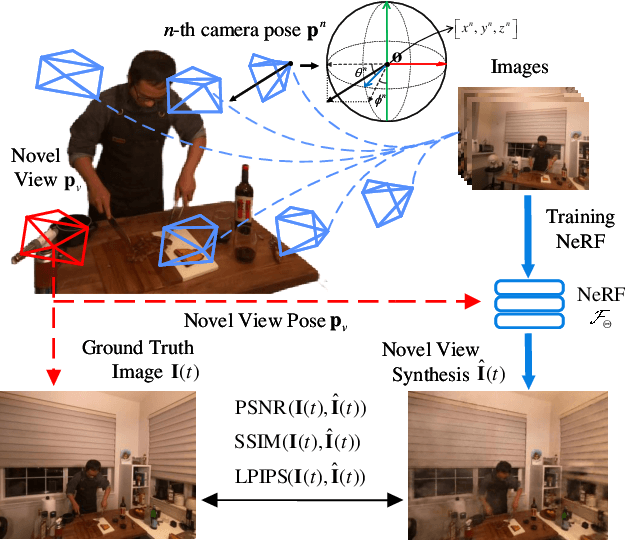
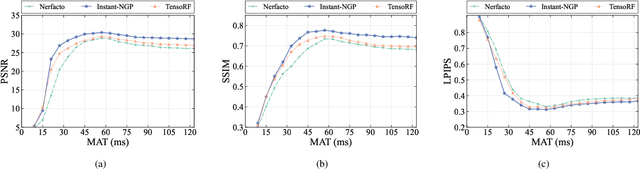
Real-time three-dimensional (3D) scene representations serve as one of the building blocks that bolster various innovative applications, e.g., digital manufacturing, Virtual/Augmented/Extended/Mixed Reality (VR/AR/XR/MR), and the metaverse. Despite substantial efforts that have been made to real-time communications and computing, real-time 3D scene representations remain a challenging task. This paper investigates the tradeoff between timeliness and fidelity in real-time 3D scene representations. Specifically, we establish a framework to evaluate the impact of communication delay on the tradeoff, where the real-world scenario is monitored by multiple cameras that communicate with an edge server. To improve fidelity for 3D scene representations, we propose to use a single-step Proximal Policy Optimization (PPO) method that leverages the Age of Information (AoI) to decide if the received image needs to be involved in 3D scene representations and rendering. We test our framework and the proposed approach with different well-known 3D scene representation methods. Simulation results reveal that real-time 3D scene representation can be sensitively affected by communication delay, and our proposed method can achieve optimal 3D scene representation results.
Real-Time Interactions Between Human Controllers and Remote Devices in Metaverse
Jul 23, 2024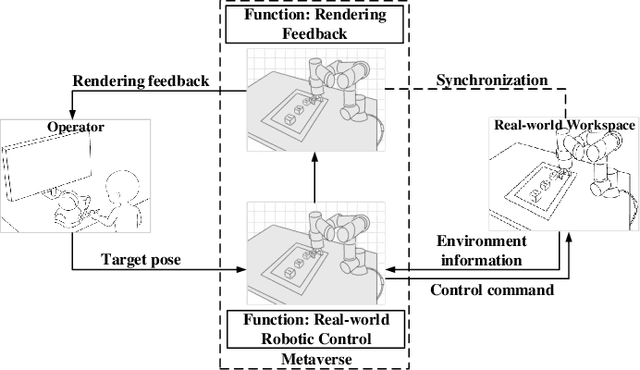
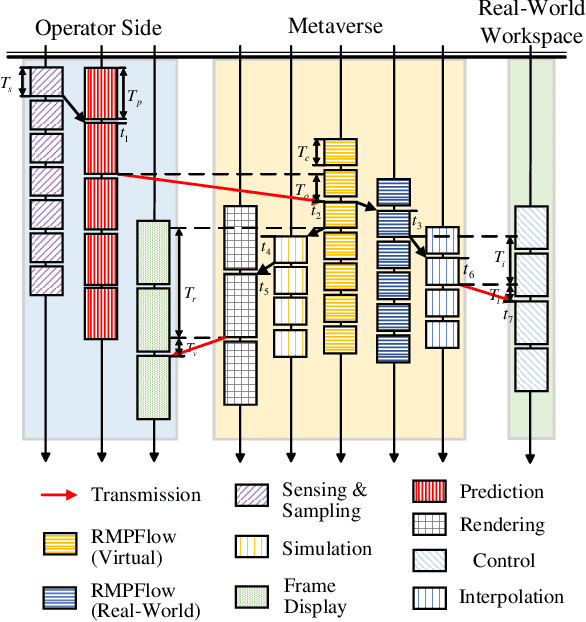
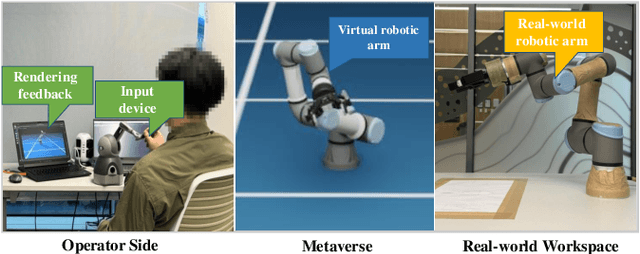
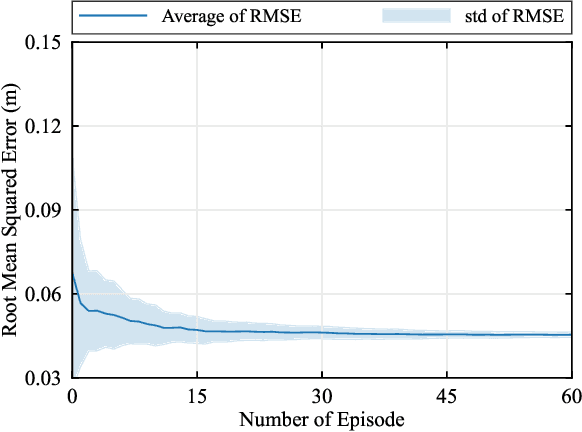
Supporting real-time interactions between human controllers and remote devices remains a challenging goal in the Metaverse due to the stringent requirements on computing workload, communication throughput, and round-trip latency. In this paper, we establish a novel framework for real-time interactions through the virtual models in the Metaverse. Specifically, we jointly predict the motion of the human controller for 1) proactive rendering in the Metaverse and 2) generating control commands to the real-world remote device in advance. The virtual model is decoupled into two components for rendering and control, respectively. To dynamically adjust the prediction horizons for rendering and control, we develop a two-step human-in-the-loop continuous reinforcement learning approach and use an expert policy to improve the training efficiency. An experimental prototype is built to verify our algorithm with different communication latencies. Compared with the baseline policy without prediction, our proposed method can reduce 1) the Motion-To-Photon (MTP) latency between human motion and rendering feedback and 2) the root mean squared error (RMSE) between human motion and real-world remote devices significantly.
Floor-Plan-aided Indoor Localization: Zero-Shot Learning Framework, Data Sets, and Prototype
May 22, 2024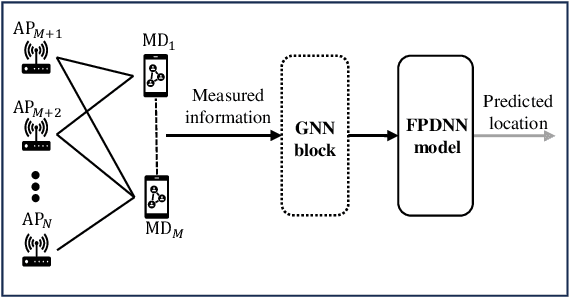
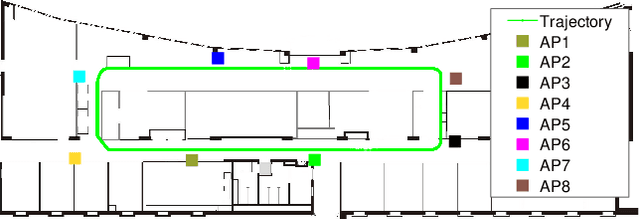
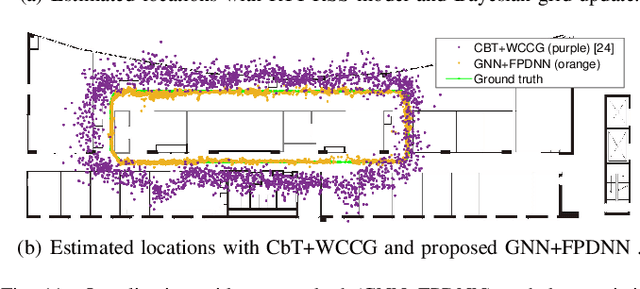
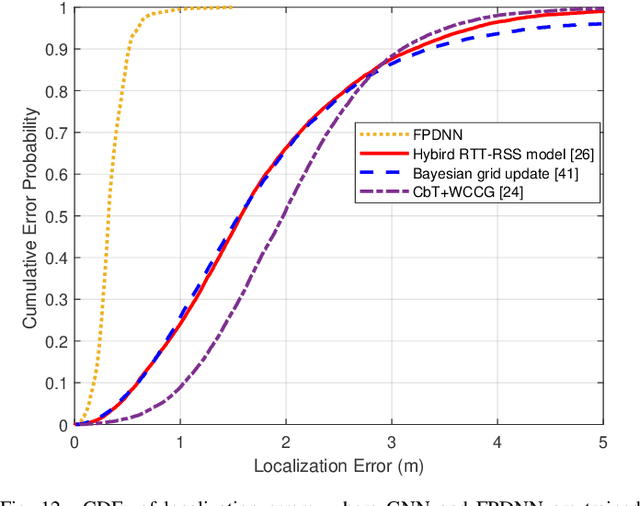
Machine learning has been considered a promising approach for indoor localization. Nevertheless, the sample efficiency, scalability, and generalization ability remain open issues of implementing learning-based algorithms in practical systems. In this paper, we establish a zero-shot learning framework that does not need real-world measurements in a new communication environment. Specifically, a graph neural network that is scalable to the number of access points (APs) and mobile devices (MDs) is used for obtaining coarse locations of MDs. Based on the coarse locations, the floor-plan image between an MD and an AP is exploited to improve localization accuracy in a floor-plan-aided deep neural network. To further improve the generalization ability, we develop a synthetic data generator that provides synthetic data samples in different scenarios, where real-world samples are not available. We implement the framework in a prototype that estimates the locations of MDs. Experimental results show that our zero-shot learning method can reduce localization errors by around $30$\% to $55$\% compared with three baselines from the existing literature.
Intelligent Mode-switching Framework for Teleoperation
Feb 08, 2024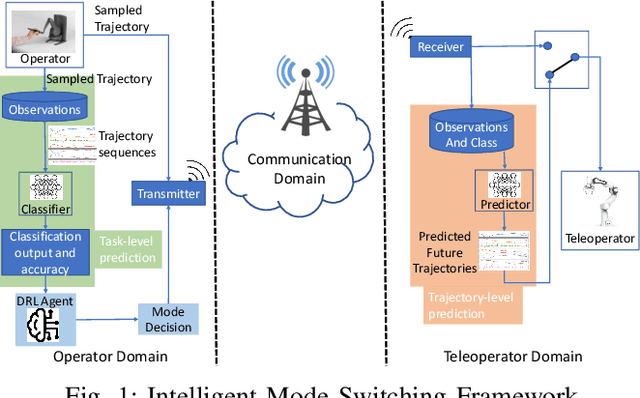
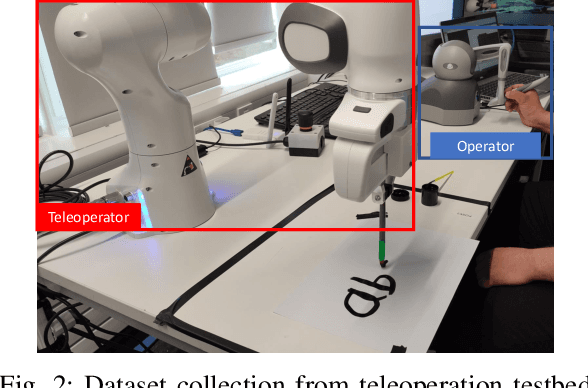
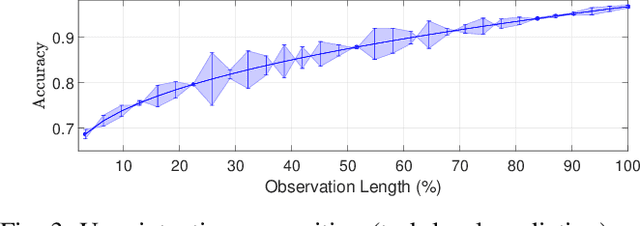
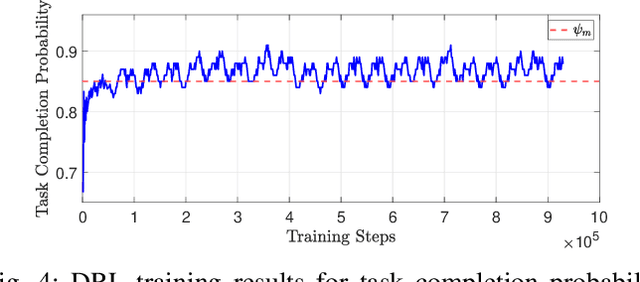
Teleoperation can be very difficult due to limited perception, high communication latency, and limited degrees of freedom (DoFs) at the operator side. Autonomous teleoperation is proposed to overcome this difficulty by predicting user intentions and performing some parts of the task autonomously to decrease the demand on the operator and increase the task completion rate. However, decision-making for mode-switching is generally assumed to be done by the operator, which brings an extra DoF to be controlled by the operator and introduces extra mental demand. On the other hand, the communication perspective is not investigated in the current literature, although communication imperfections and resource limitations are the main bottlenecks for teleoperation. In this study, we propose an intelligent mode-switching framework by jointly considering mode-switching and communication systems. User intention recognition is done at the operator side. Based on user intention recognition, a deep reinforcement learning (DRL) agent is trained and deployed at the operator side to seamlessly switch between autonomous and teleoperation modes. A real-world data set is collected from our teleoperation testbed to train both user intention recognition and DRL algorithms. Our results show that the proposed framework can achieve up to 50% communication load reduction with improved task completion probability.
Secure Deep Reinforcement Learning for Dynamic Resource Allocation in Wireless MEC Networks
Dec 13, 2023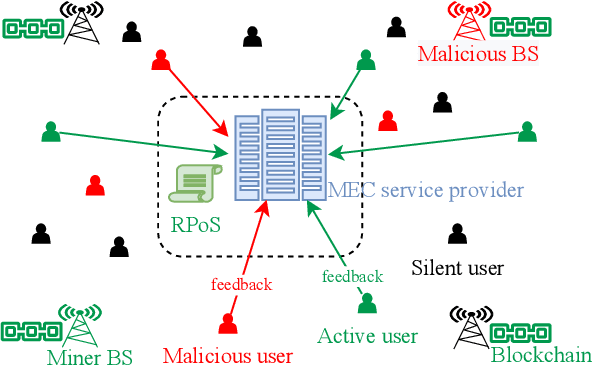
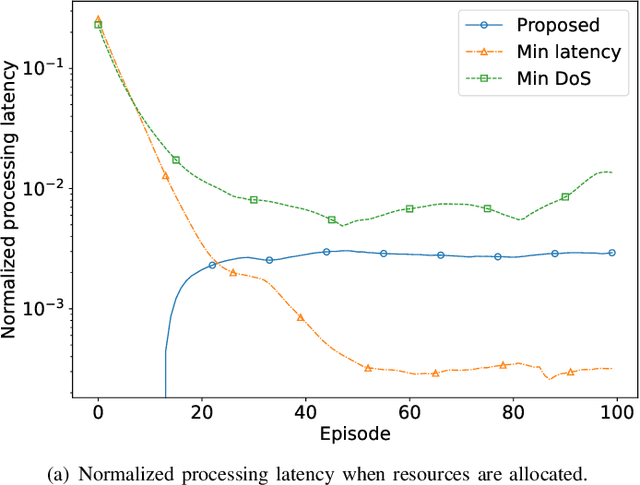
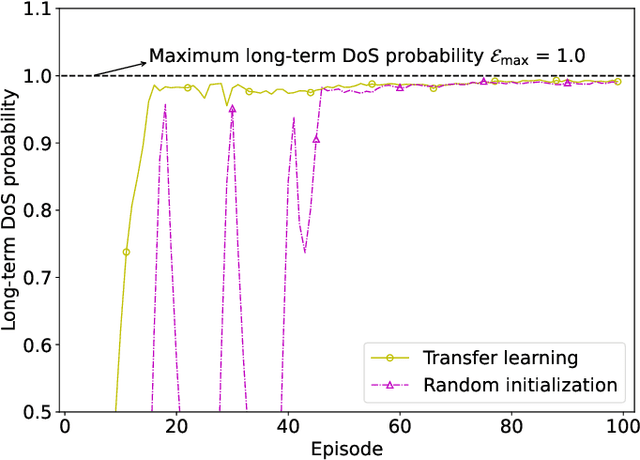
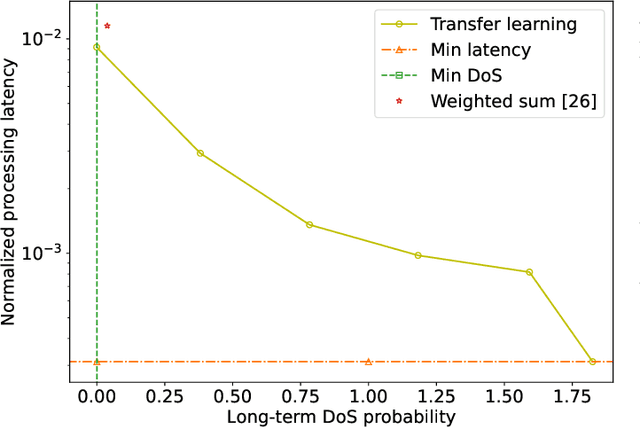
This paper proposes a blockchain-secured deep reinforcement learning (BC-DRL) optimization framework for {data management and} resource allocation in decentralized {wireless mobile edge computing (MEC)} networks. In our framework, {we design a low-latency reputation-based proof-of-stake (RPoS) consensus protocol to select highly reliable blockchain-enabled BSs to securely store MEC user requests and prevent data tampering attacks.} {We formulate the MEC resource allocation optimization as a constrained Markov decision process that balances minimum processing latency and denial-of-service (DoS) probability}. {We use the MEC aggregated features as the DRL input to significantly reduce the high-dimensionality input of the remaining service processing time for individual MEC requests. Our designed constrained DRL effectively attains the optimal resource allocations that are adapted to the dynamic DoS requirements. We provide extensive simulation results and analysis to} validate that our BC-DRL framework achieves higher security, reliability, and resource utilization efficiency than benchmark blockchain consensus protocols and {MEC} resource allocation algorithms.
Graph Neural Network-Based Bandwidth Allocation for Secure Wireless Communications
Dec 13, 2023This paper designs a graph neural network (GNN) to improve bandwidth allocations for multiple legitimate wireless users transmitting to a base station in the presence of an eavesdropper. To improve the privacy and prevent eavesdropping attacks, we propose a user scheduling algorithm to schedule users satisfying an instantaneous minimum secrecy rate constraint. Based on this, we optimize the bandwidth allocations with three algorithms namely iterative search (IvS), GNN-based supervised learning (GNN-SL), and GNN-based unsupervised learning (GNN-USL). We present a computational complexity analysis which shows that GNN-SL and GNN-USL can be more efficient compared to IvS which is limited by the bandwidth block size. Numerical simulation results highlight that our proposed GNN-based resource allocations can achieve a comparable sum secrecy rate compared to IvS with significantly lower computational complexity. Furthermore, we observe that the GNN approach is more robust to uncertainties in the eavesdropper's channel state information, especially compared with the best channel allocation scheme.
Task-Oriented Cross-System Design for Timely and Accurate Modeling in the Metaverse
Sep 11, 2023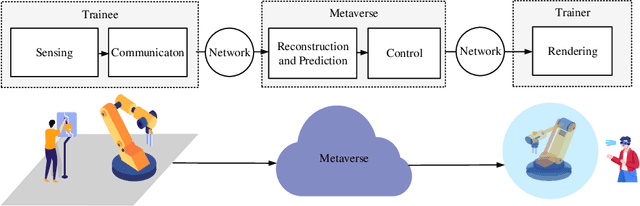
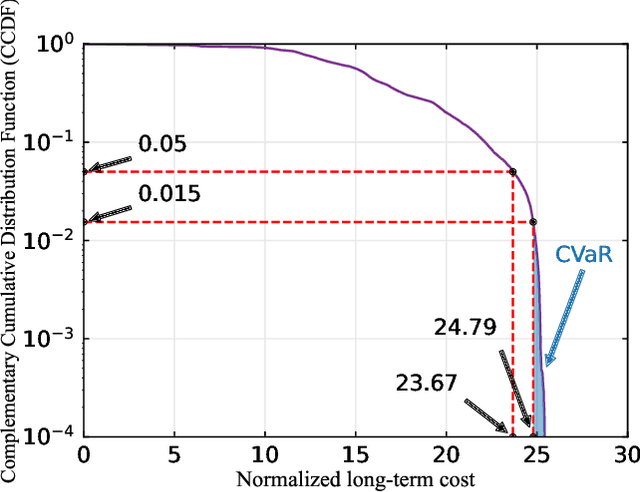
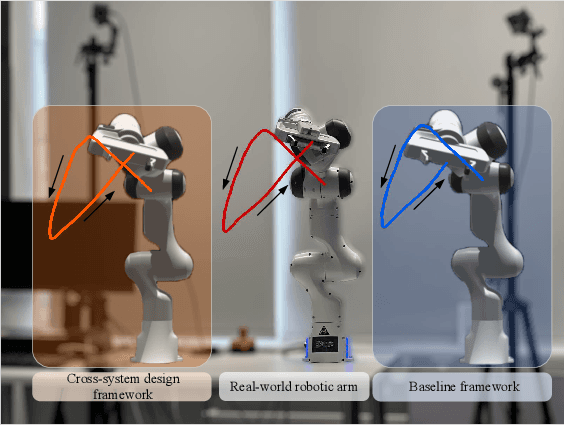
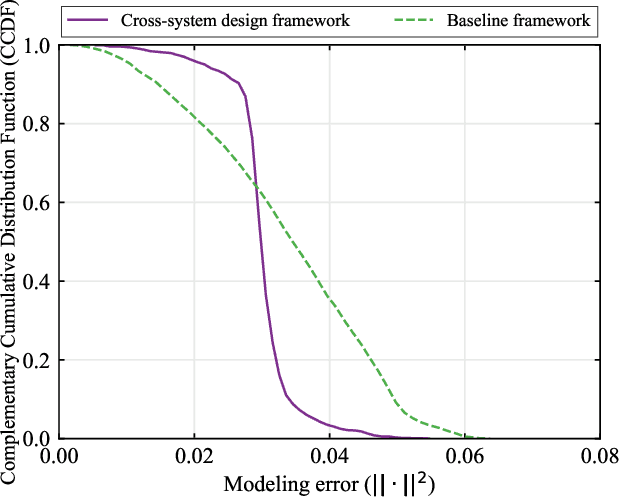
In this paper, we establish a task-oriented cross-system design framework to minimize the required packet rate for timely and accurate modeling of a real-world robotic arm in the Metaverse, where sensing, communication, prediction, control, and rendering are considered. To optimize a scheduling policy and prediction horizons, we design a Constraint Proximal Policy Optimization(C-PPO) algorithm by integrating domain knowledge from relevant systems into the advanced reinforcement learning algorithm, Proximal Policy Optimization(PPO). Specifically, the Jacobian matrix for analyzing the motion of the robotic arm is included in the state of the C-PPO algorithm, and the Conditional Value-at-Risk(CVaR) of the state-value function characterizing the long-term modeling error is adopted in the constraint. Besides, the policy is represented by a two-branch neural network determining the scheduling policy and the prediction horizons, respectively. To evaluate our algorithm, we build a prototype including a real-world robotic arm and its digital model in the Metaverse. The experimental results indicate that domain knowledge helps to reduce the convergence time and the required packet rate by up to 50%, and the cross-system design framework outperforms a baseline framework in terms of the required packet rate and the tail distribution of the modeling error.