 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHaptic-Based User Authentication for Tele-robotic System
Jun 17, 2025Tele-operated robots rely on real-time user behavior mapping for remote tasks, but ensuring secure authentication remains a challenge. Traditional methods, such as passwords and static biometrics, are vulnerable to spoofing and replay attacks, particularly in high-stakes, continuous interactions. This paper presents a novel anti-spoofing and anti-replay authentication approach that leverages distinctive user behavioral features extracted from haptic feedback during human-robot interactions. To evaluate our authentication approach, we collected a time-series force feedback dataset from 15 participants performing seven distinct tasks. We then developed a transformer-based deep learning model to extract temporal features from the haptic signals. By analyzing user-specific force dynamics, our method achieves over 90 percent accuracy in both user identification and task classification, demonstrating its potential for enhancing access control and identity assurance in tele-robotic systems.
Intelligent Mode-switching Framework for Teleoperation
Feb 08, 2024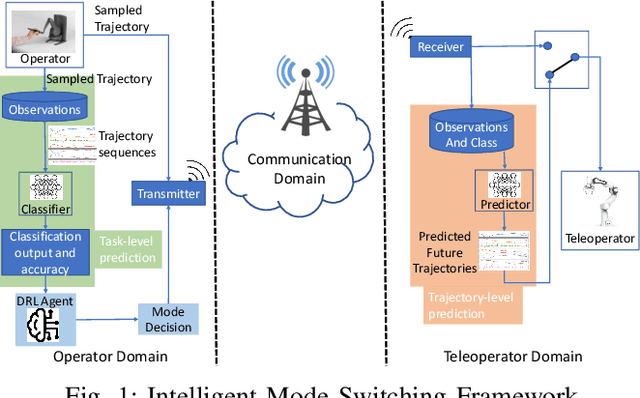
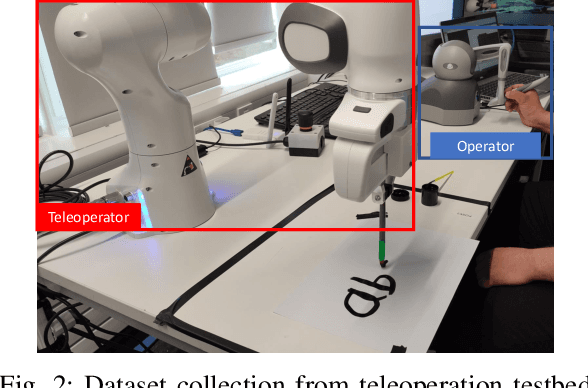
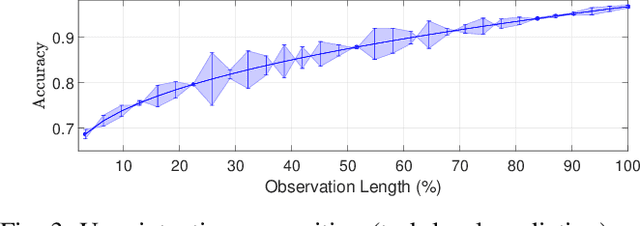
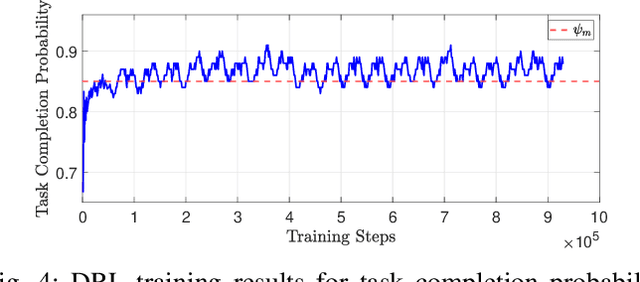
Teleoperation can be very difficult due to limited perception, high communication latency, and limited degrees of freedom (DoFs) at the operator side. Autonomous teleoperation is proposed to overcome this difficulty by predicting user intentions and performing some parts of the task autonomously to decrease the demand on the operator and increase the task completion rate. However, decision-making for mode-switching is generally assumed to be done by the operator, which brings an extra DoF to be controlled by the operator and introduces extra mental demand. On the other hand, the communication perspective is not investigated in the current literature, although communication imperfections and resource limitations are the main bottlenecks for teleoperation. In this study, we propose an intelligent mode-switching framework by jointly considering mode-switching and communication systems. User intention recognition is done at the operator side. Based on user intention recognition, a deep reinforcement learning (DRL) agent is trained and deployed at the operator side to seamlessly switch between autonomous and teleoperation modes. A real-world data set is collected from our teleoperation testbed to train both user intention recognition and DRL algorithms. Our results show that the proposed framework can achieve up to 50% communication load reduction with improved task completion probability.
Task-Oriented Prediction and Communication Co-Design for Haptic Communications
Feb 21, 2023



Prediction has recently been considered as a promising approach to meet low-latency and high-reliability requirements in long-distance haptic communications. However, most of the existing methods did not take features of tasks and the relationship between prediction and communication into account. In this paper, we propose a task-oriented prediction and communication co-design framework, where the reliability of the system depends on prediction errors and packet losses in communications. The goal is to minimize the required radio resources subject to the low-latency and high-reliability requirements of various tasks. Specifically, we consider the just noticeable difference (JND) as a performance metric for the haptic communication system. We collect experiment data from a real-world teleoperation testbed and use time-series generative adversarial networks (TimeGAN) to generate a large amount of synthetic data. This allows us to obtain the relationship between the JND threshold, prediction horizon, and the overall reliability including communication reliability and prediction reliability. We take 5G New Radio as an example to demonstrate the proposed framework and optimize bandwidth allocation and data rates of devices. Our numerical and experimental results show that the proposed framework can reduce wireless resource consumption up to 77.80% compared with a task-agnostic benchmark.