 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntelligent Mode-switching Framework for Teleoperation
Feb 08, 2024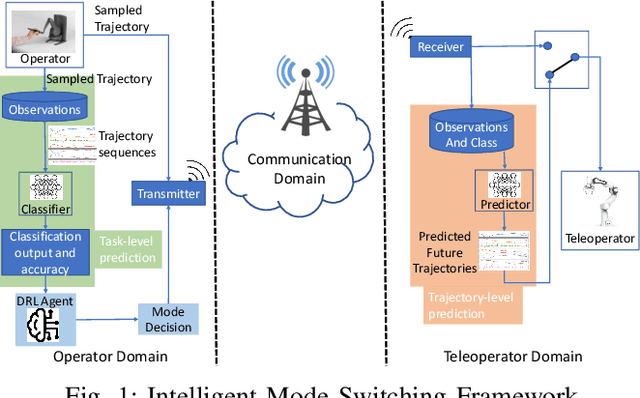
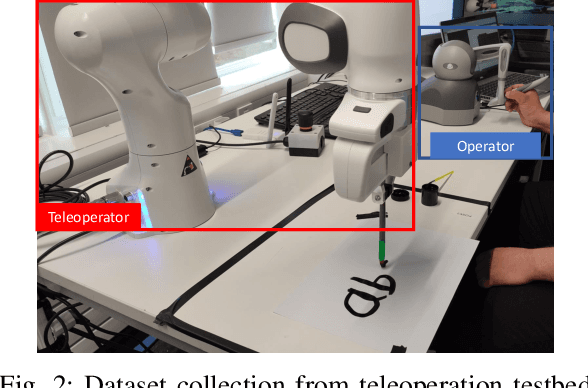
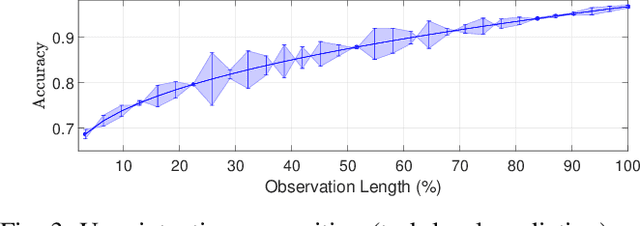
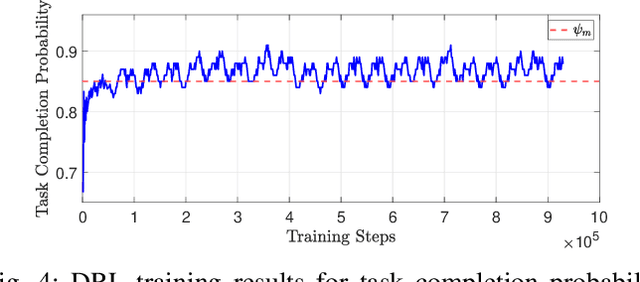
Teleoperation can be very difficult due to limited perception, high communication latency, and limited degrees of freedom (DoFs) at the operator side. Autonomous teleoperation is proposed to overcome this difficulty by predicting user intentions and performing some parts of the task autonomously to decrease the demand on the operator and increase the task completion rate. However, decision-making for mode-switching is generally assumed to be done by the operator, which brings an extra DoF to be controlled by the operator and introduces extra mental demand. On the other hand, the communication perspective is not investigated in the current literature, although communication imperfections and resource limitations are the main bottlenecks for teleoperation. In this study, we propose an intelligent mode-switching framework by jointly considering mode-switching and communication systems. User intention recognition is done at the operator side. Based on user intention recognition, a deep reinforcement learning (DRL) agent is trained and deployed at the operator side to seamlessly switch between autonomous and teleoperation modes. A real-world data set is collected from our teleoperation testbed to train both user intention recognition and DRL algorithms. Our results show that the proposed framework can achieve up to 50% communication load reduction with improved task completion probability.
Task-Oriented Cross-System Design for Timely and Accurate Modeling in the Metaverse
Sep 11, 2023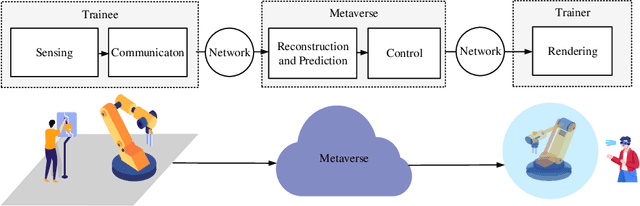
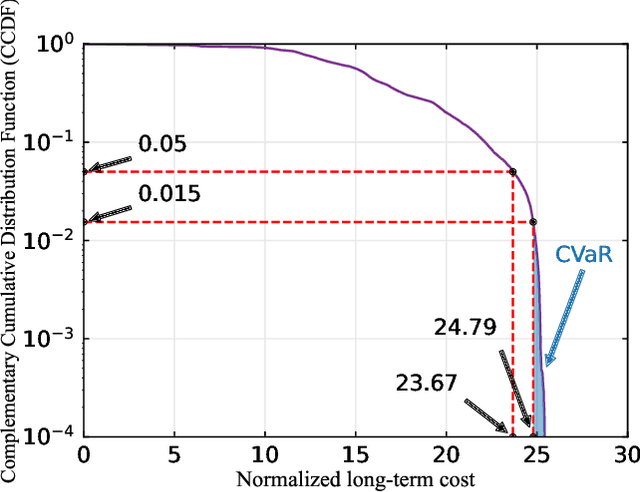
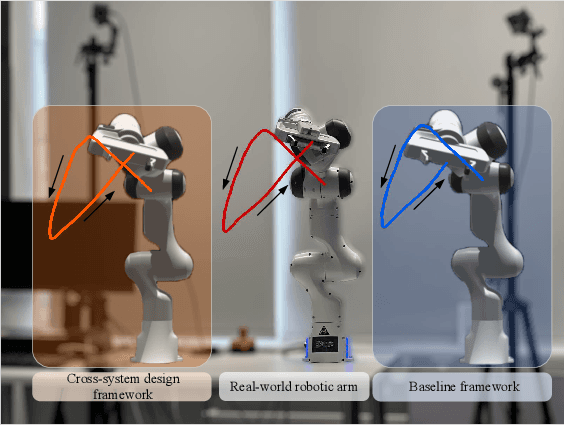
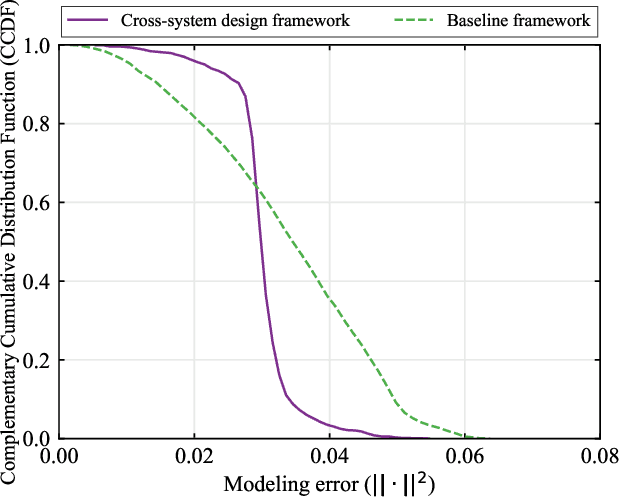
In this paper, we establish a task-oriented cross-system design framework to minimize the required packet rate for timely and accurate modeling of a real-world robotic arm in the Metaverse, where sensing, communication, prediction, control, and rendering are considered. To optimize a scheduling policy and prediction horizons, we design a Constraint Proximal Policy Optimization(C-PPO) algorithm by integrating domain knowledge from relevant systems into the advanced reinforcement learning algorithm, Proximal Policy Optimization(PPO). Specifically, the Jacobian matrix for analyzing the motion of the robotic arm is included in the state of the C-PPO algorithm, and the Conditional Value-at-Risk(CVaR) of the state-value function characterizing the long-term modeling error is adopted in the constraint. Besides, the policy is represented by a two-branch neural network determining the scheduling policy and the prediction horizons, respectively. To evaluate our algorithm, we build a prototype including a real-world robotic arm and its digital model in the Metaverse. The experimental results indicate that domain knowledge helps to reduce the convergence time and the required packet rate by up to 50%, and the cross-system design framework outperforms a baseline framework in terms of the required packet rate and the tail distribution of the modeling error.
NEOLAF, an LLM-powered neural-symbolic cognitive architecture
Aug 08, 2023This paper presents the Never Ending Open Learning Adaptive Framework (NEOLAF), an integrated neural-symbolic cognitive architecture that models and constructs intelligent agents. The NEOLAF framework is a superior approach to constructing intelligent agents than both the pure connectionist and pure symbolic approaches due to its explainability, incremental learning, efficiency, collaborative and distributed learning, human-in-the-loop enablement, and self-improvement. The paper further presents a compelling experiment where a NEOLAF agent, built as a problem-solving agent, is fed with complex math problems from the open-source MATH dataset. The results demonstrate NEOLAF's superior learning capability and its potential to revolutionize the field of cognitive architectures and self-improving adaptive instructional systems.
Task-Oriented Metaverse Design in the 6G Era
Jun 05, 2023



As an emerging concept, the Metaverse has the potential to revolutionize the social interaction in the post-pandemic era by establishing a digital world for online education, remote healthcare, immersive business, intelligent transportation, and advanced manufacturing. The goal is ambitious, yet the methodologies and technologies to achieve the full vision of the Metaverse remain unclear. In this paper, we first introduce the three infrastructure pillars that lay the foundation of the Metaverse, i.e., human-computer interfaces, sensing and communication systems, and network architectures. Then, we depict the roadmap towards the Metaverse that consists of four stages with different applications. To support diverse applications in the Metaverse, we put forward a novel design methodology: task-oriented design, and further review the challenges and the potential solutions. In the case study, we develop a prototype to illustrate how to synchronize a real-world device and its digital model in the Metaverse by task-oriented design, where a deep reinforcement learning algorithm is adopted to minimize the required communication throughput by optimizing the sampling and prediction systems subject to a synchronization error constraint.
Task-Oriented Prediction and Communication Co-Design for Haptic Communications
Feb 21, 2023



Prediction has recently been considered as a promising approach to meet low-latency and high-reliability requirements in long-distance haptic communications. However, most of the existing methods did not take features of tasks and the relationship between prediction and communication into account. In this paper, we propose a task-oriented prediction and communication co-design framework, where the reliability of the system depends on prediction errors and packet losses in communications. The goal is to minimize the required radio resources subject to the low-latency and high-reliability requirements of various tasks. Specifically, we consider the just noticeable difference (JND) as a performance metric for the haptic communication system. We collect experiment data from a real-world teleoperation testbed and use time-series generative adversarial networks (TimeGAN) to generate a large amount of synthetic data. This allows us to obtain the relationship between the JND threshold, prediction horizon, and the overall reliability including communication reliability and prediction reliability. We take 5G New Radio as an example to demonstrate the proposed framework and optimize bandwidth allocation and data rates of devices. Our numerical and experimental results show that the proposed framework can reduce wireless resource consumption up to 77.80% compared with a task-agnostic benchmark.
Sampling, Communication, and Prediction Co-Design for Synchronizing the Real-World Device and Digital Model in Metaverse
Jul 31, 2022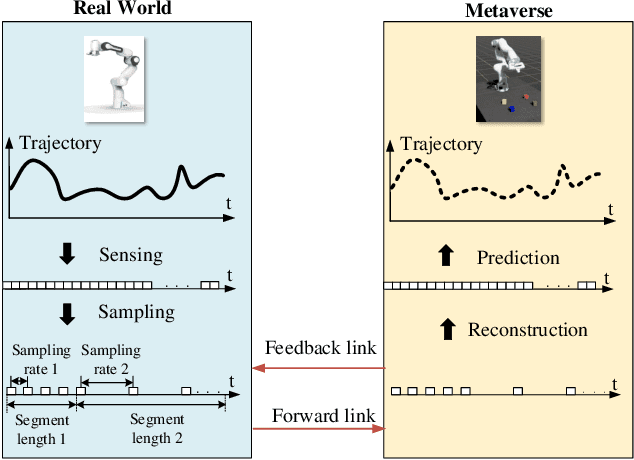
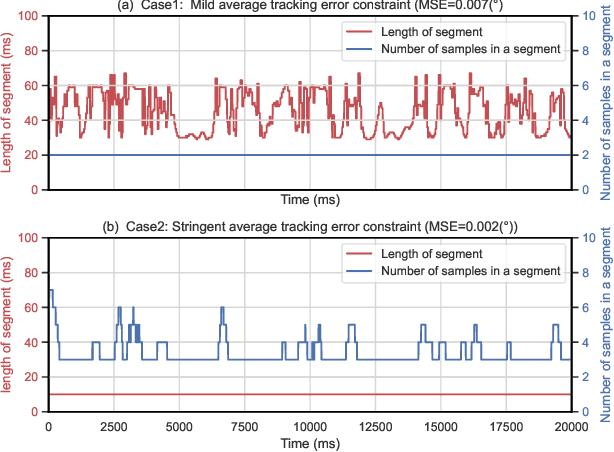
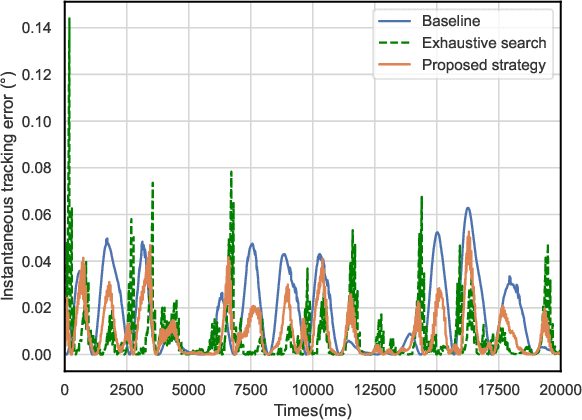
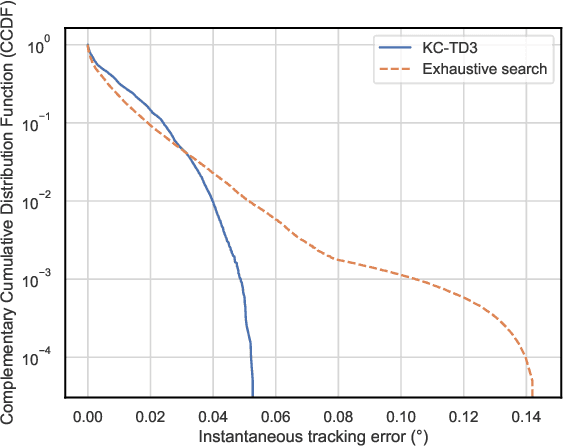
The metaverse has the potential to revolutionize the next generation of the Internet by supporting highly interactive services with the help of Mixed Reality (MR) technologies; still, to provide a satisfactory experience for users, the synchronization between the physical world and its digital models is crucial. This work proposes a sampling, communication and prediction co-design framework to minimize the communication load subject to a constraint on tracking the Mean Squared Error (MSE) between a real-world device and its digital model in the metaverse. To optimize the sampling rate and the prediction horizon, we exploit expert knowledge and develop a constrained Deep Reinforcement Learning (DRL) algorithm, named Knowledge-assisted Constrained Twin-Delayed Deep Deterministic (KC-TD3) policy gradient algorithm. We validate our framework on a prototype composed of a real-world robotic arm and its digital model. Compared with existing approaches: (1) When the tracking error constraint is stringent (MSE=0.002 degrees), our policy degenerates into the policy in the sampling-communication co-design framework. (2) When the tracking error constraint is mild (MSE=0.007 degrees), our policy degenerates into the policy in the prediction-communication co-design framework. (3) Our framework achieves a better trade-off between the average MSE and the average communication load compared with a communication system without sampling and prediction. For example, the average communication load can be reduced up to 87% when the track error constraint is 0.002 degrees. (4) Our policy outperforms the benchmark with the static sampling rate and prediction horizon optimized by exhaustive search, in terms of the tail probability of the tracking error. Furthermore, with the assistance of expert knowledge, the proposed algorithm KC-TD3 achieves better convergence time, stability, and final policy performance.
TCR: A Transformer Based Deep Network for Predicting Cancer Drugs Response
Jul 10, 2022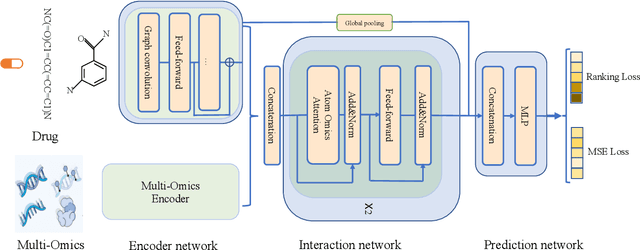
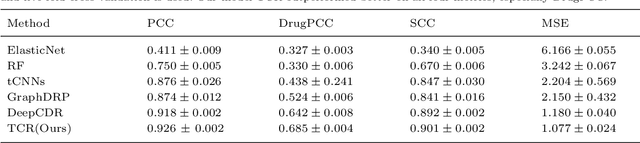
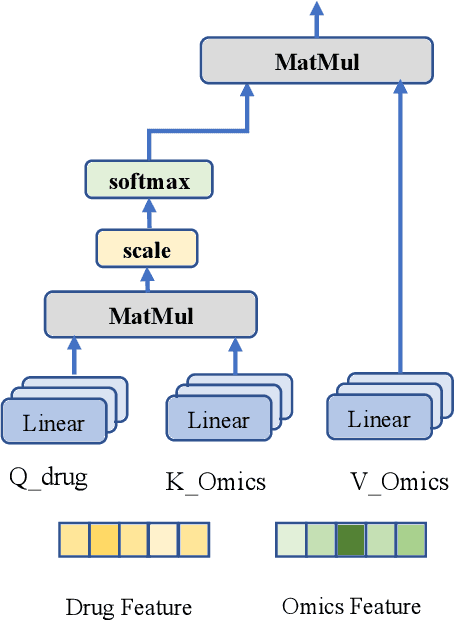

Predicting clinical outcomes to anti-cancer drugs on a personalized basis is challenging in cancer treatment due to the heterogeneity of tumors. Traditional computational efforts have been made to model the effect of drug response on individual samples depicted by their molecular profile, yet overfitting occurs because of the high dimension for omics data, hindering models from clinical application. Recent research shows that deep learning is a promising approach to build drug response models by learning alignment patterns between drugs and samples. However, existing studies employed the simple feature fusion strategy and only considered the drug features as a whole representation while ignoring the substructure information that may play a vital role when aligning drugs and genes. Hereby in this paper, we propose TCR (Transformer based network for Cancer drug Response) to predict anti-cancer drug response. By utilizing an attention mechanism, TCR is able to learn the interactions between drug atom/sub-structure and molecular signatures efficiently in our study. Furthermore, a dual loss function and cross sampling strategy were designed to improve the prediction power of TCR. We show that TCR outperformed all other methods under various data splitting strategies on all evaluation matrices (some with significant improvement). Extensive experiments demonstrate that TCR shows significantly improved generalization ability on independent in-vitro experiments and in-vivo real patient data. Our study highlights the prediction power of TCR and its potential value for cancer drug repurpose and precision oncology treatment.
Spectral Classification Using Restricted Boltzmann Machine
Oct 13, 2013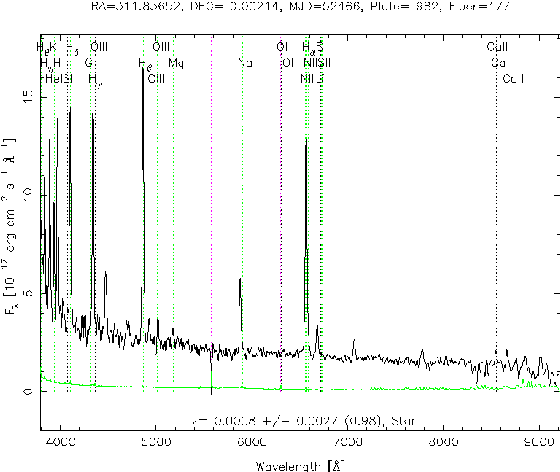
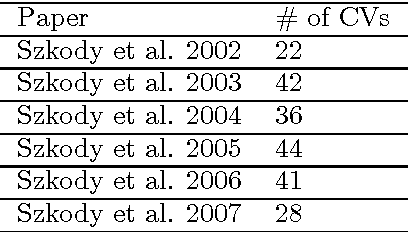
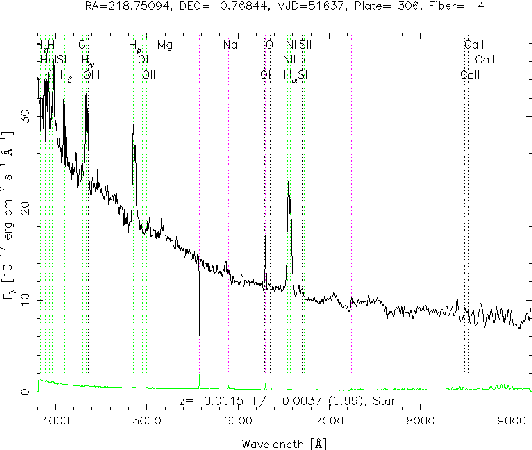
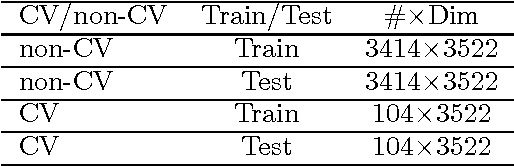
In this study, a novel machine learning algorithm, restricted Boltzmann machine (RBM), is introduced. The algorithm is applied for the spectral classification in astronomy. RBM is a bipartite generative graphical model with two separate layers (one visible layer and one hidden layer), which can extract higher level features to represent the original data. Despite generative, RBM can be used for classification when modified with a free energy and a soft-max function. Before spectral classification, the original data is binarized according to some rule. Then we resort to the binary RBM to classify cataclysmic variables (CVs) and non-CVs (one half of all the given data for training and the other half for testing). The experiment result shows state-of-the-art accuracy of 100%, which indicates the efficiency of the binary RBM algorithm.