 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemantic Error Correction and Decoding for Short Block Channel Codes
Apr 24, 2026This paper presents a semantic-enhanced receiver framework for transmitting natural language sentences over noisy wireless channels using multiple short block codes. After ASCII encoding, the sentence is divided into segments, each independently encoded with a short block code and transmitted over an AWGN channel. At the receiver, segments are decoded in parallel, followed by a semantic error correction (SEC) model, which reconstructs corrupted segments using language model context. We further propose the semantic list decoding (SLD), which generates multiple candidate reconstructions and selects the best one via weighted Hamming distance, and a semantic confidence-guided HARQ (SHARQ) mechanism that replaces CRC-based error detection with a confidence score, enabling selective segment retransmission without CRC overhead. All modules are designed and trained using bidirectional and auto-regressive transformers (BART). Simulation results demonstrate that the proposed scheme significantly outperforms conventional capacity-approaching short codes and long codes at the same rate. Specifically, SEC provides approximately 0.4 dB BLER gain over plain short-code transmission, while SLD extends this to 0.8 dB. Compared to transmitting the entire sentence as a single long 5G LDPC codeword, our approach significantly improves semantic fidelity and reduces decoding latency by up to 90\%. SHARQ further provides an additional 1.5 dB gain over conventional HARQ.
Joint Optimization of Flexible Antenna Array Shape and Beamforming for Secure Communication
Feb 27, 2026Flexible antenna arrays (FAAs) can physically reshape their geometry to add new spatial degrees of freedom, whereas transmit beamforming adjusts the complex element weights to electronically steer and shape the array's radiation pattern, thereby significantly improving communication performance. This paper is the first to explore the integration of FAA geometry control and beamforming for physical layer security enhancement, where a base station equipped with an FAA communicates with a legitimate user in the presence of passive eavesdroppers. To safeguard confidential transmissions, we formulate a new secrecy rate maximization problem that jointly optimizes the transmit beamforming vector and a continuous FAA shape control parameter. Due to the non convex nature of the problem, an alternating optimization algorithm is developed to decompose the joint design into tractable subproblems, which are solved iteratively to refine both the FAA geometry and beamforming strategy. Simulation results confirm that the proposed joint optimization framework significantly outperforms conventional fixed shape or beamforming only schemes, demonstrating the potential of FAA enabled reconfigurability for secure wireless communications.
A Synergistic Approach: Dynamics-AI Ensemble in Tropical Cyclone Forecasting
Feb 26, 2026This study addresses a critical challenge in AI-based weather forecasting by developing an AI-driven optimized ensemble forecast system using Orthogonal Conditional Nonlinear Optimal Perturbations (O-CNOPs). The system bridges the gap between computational efficiency and dynamic consistency in tropical cyclone (TC) forecasting. Unlike conventional ensembles limited by computational costs or AI ensembles constrained by inadequate perturbation methods, O-CNOPs generate dynamically optimized perturbations that capture fast-growing errors of FuXi model while maintaining plausibility. The key innovation lies in producing orthogonal perturbations that respect FuXi nonlinear dynamics, yielding structures reflecting dominant dynamical controls and physically interpretable probabilistic forecasts. Demonstrating superior deterministic and probabilistic skills over the operational Integrated Forecasting System Ensemble Prediction System, this work establishes a new paradigm combining AI computational advantages with rigorous dynamical constraints. Success in TC track forecasting paves the way for reliable ensemble forecasts of other high-impact weather systems, marking a major step toward operational AI-based ensemble forecasting.
LocDreamer: World Model-Based Learning for Joint Indoor Tracking and Anchor Scheduling
Feb 09, 2026Accurate, resource-efficient localization and tracking enables numerous location-aware services in next-generation wireless networks. However, existing machine learning-based methods often require large labeled datasets while overlooking spectrum and energy efficiencies. To fill this gap, we propose LocDreamer, a world model (WM)-based framework for joint target tracking and scheduling of localization anchors. LocDreamer learns a WM that captures the latent representation of the target motion and localization environment, thereby generating synthetic measurements to imagine arbitrary anchor deployments. These measurements enable imagination-driven training of both the tracking model and the reinforcement learning (RL)-based anchor scheduler that activates only the most informative anchors, which significantly reduce energy and signaling costs while preserving high tracking accuracy. Experiments on a real-world indoor dataset demonstrate that LocDreamer substantially improves data efficiency and generalization, outperforming conventional Bayesian filter with random scheduling by 37% in tracking accuracy, and achieving 86% of the accuracy of same model trained directly on real data.
Pulse Shaping Filter Design for Zak-OTFS
Feb 07, 2026The Zak-transform-based Orthogonal Time Frequency Space (Zak-OTFS), offers a robust framework for high-mobility communications by simplifying the input-output (I/O) relation to a twisted convolution. While this structure theoretically enables accurate channel estimation by sampling the response from one pilot symbol, practical implementation is constrained by the spreading of effective channel response induced by pulse shaping filters. To address this, we first derive the I/O relationship for discrete-time oversampled Zak-OTFS, which closely approximates the continuous-time system and facilitates analysis and numerical simulation. We show that every delay-Doppler domain symbol undergoes the same effective channel response under the discrete oversampled Zak-OTFS. We then analyze the impact of window ambiguity functions, and reveal that high sidelobes lead to wide channel spreading and degrade estimation accuracy. Building on this insight, we propose a novel pulse shaping filter design that synthesizes Prolate Spheroidal Wave Functions (PSWFs) within the Isotropic Orthogonal Transform Algorithm (IOTA) framework. Numerical simulations confirm that the proposed design achieves superior channel estimation accuracy and bit error rate (BER) performance compared to conventional root-raised-cosine and rectangular windowing schemes in the high-SNR regime.
Medical Referring Image Segmentation via Next-Token Mask Prediction
Nov 07, 2025Medical Referring Image Segmentation (MRIS) involves segmenting target regions in medical images based on natural language descriptions. While achieving promising results, recent approaches usually involve complex design of multimodal fusion or multi-stage decoders. In this work, we propose NTP-MRISeg, a novel framework that reformulates MRIS as an autoregressive next-token prediction task over a unified multimodal sequence of tokenized image, text, and mask representations. This formulation streamlines model design by eliminating the need for modality-specific fusion and external segmentation models, supports a unified architecture for end-to-end training. It also enables the use of pretrained tokenizers from emerging large-scale multimodal models, enhancing generalization and adaptability. More importantly, to address challenges under this formulation-such as exposure bias, long-tail token distributions, and fine-grained lesion edges-we propose three novel strategies: (1) a Next-k Token Prediction (NkTP) scheme to reduce cumulative prediction errors, (2) Token-level Contrastive Learning (TCL) to enhance boundary sensitivity and mitigate long-tail distribution effects, and (3) a memory-based Hard Error Token (HET) optimization strategy that emphasizes difficult tokens during training. Extensive experiments on the QaTa-COV19 and MosMedData+ datasets demonstrate that NTP-MRISeg achieves new state-of-the-art performance, offering a streamlined and effective alternative to traditional MRIS pipelines.
Short Wins Long: Short Codes with Language Model Semantic Correction Outperform Long Codes
May 13, 2025This paper presents a novel semantic-enhanced decoding scheme for transmitting natural language sentences with multiple short block codes over noisy wireless channels. After ASCII source coding, the natural language sentence message is divided into segments, where each is encoded with short block channel codes independently before transmission. At the receiver, each short block of codewords is decoded in parallel, followed by a semantic error correction (SEC) model to reconstruct corrupted segments semantically. We design and train the SEC model based on Bidirectional and Auto-Regressive Transformers (BART). Simulations demonstrate that the proposed scheme can significantly outperform encoding the sentence with one conventional long LDPC code, in terms of block error rate (BLER), semantic metrics, and decoding latency. Finally, we proposed a semantic hybrid automatic repeat request (HARQ) scheme to further enhance the error performance, which selectively requests retransmission depends on semantic uncertainty.
Vehicular Multi-Tier Distributed Computing with Hybrid THz-RF Transmission in Satellite-Terrestrial Integrated Networks
Jan 26, 2025In this paper, we propose a Satellite-Terrestrial Integrated Network (STIN) assisted vehicular multi-tier distributed computing (VMDC) system leveraging hybrid terahertz (THz) and radio frequency (RF) communication technologies. Task offloading for satellite edge computing is enabled by THz communication using the orthogonal frequency division multiple access (OFDMA) technique. For terrestrial edge computing, we employ non-orthogonal multiple access (NOMA) and vehicle clustering to realize task offloading. We formulate a non-convex optimization problem aimed at maximizing computation efficiency by jointly optimizing bandwidth allocation, task allocation, subchannel-vehicle matching and power allocation. To address this non-convex optimization problem, we decompose the original problem into four sub-problems and solve them using an alternating iterative optimization approach. For the subproblem of task allocation, we solve it by linear programming. To solve the subproblem of sub-channel allocation, we exploit many-to-one matching theory to obtain the result. The subproblem of bandwidth allocation of OFDMA and the subproblem of power allocation of NOMA are solved by quadratic transformation method. Finally, the simulation results show that our proposed scheme significantly enhances the computation efficiency of the STIN-based VMDC system compared with the benchmark schemes.
Distributed satellite information networks: Architecture, enabling technologies, and trends
Dec 17, 2024



Driven by the vision of ubiquitous connectivity and wireless intelligence, the evolution of ultra-dense constellation-based satellite-integrated Internet is underway, now taking preliminary shape. Nevertheless, the entrenched institutional silos and limited, nonrenewable heterogeneous network resources leave current satellite systems struggling to accommodate the escalating demands of next-generation intelligent applications. In this context, the distributed satellite information networks (DSIN), exemplified by the cohesive clustered satellites system, have emerged as an innovative architecture, bridging information gaps across diverse satellite systems, such as communication, navigation, and remote sensing, and establishing a unified, open information network paradigm to support resilient space information services. This survey first provides a profound discussion about innovative network architectures of DSIN, encompassing distributed regenerative satellite network architecture, distributed satellite computing network architecture, and reconfigurable satellite formation flying, to enable flexible and scalable communication, computing and control. The DSIN faces challenges from network heterogeneity, unpredictable channel dynamics, sparse resources, and decentralized collaboration frameworks. To address these issues, a series of enabling technologies is identified, including channel modeling and estimation, cloud-native distributed MIMO cooperation, grant-free massive access, network routing, and the proper combination of all these diversity techniques. Furthermore, to heighten the overall resource efficiency, the cross-layer optimization techniques are further developed to meet upper-layer deterministic, adaptive and secure information services requirements. In addition, emerging research directions and new opportunities are highlighted on the way to achieving the DSIN vision.
GNN-based Auto-Encoder for Short Linear Block Codes: A DRL Approach
Dec 03, 2024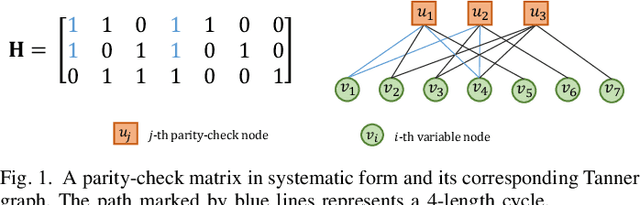
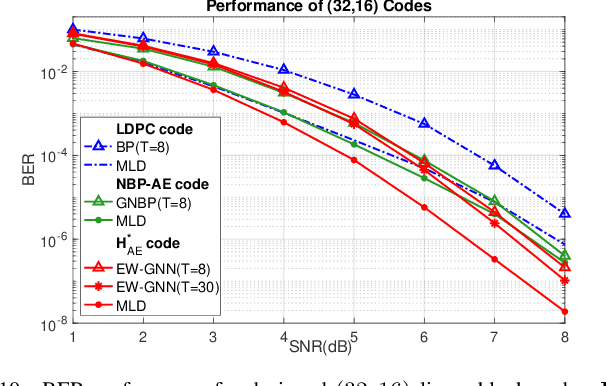
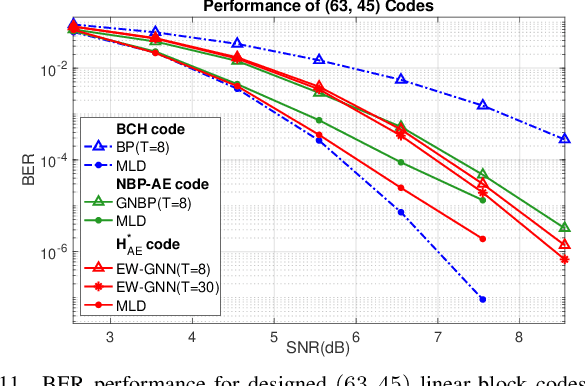
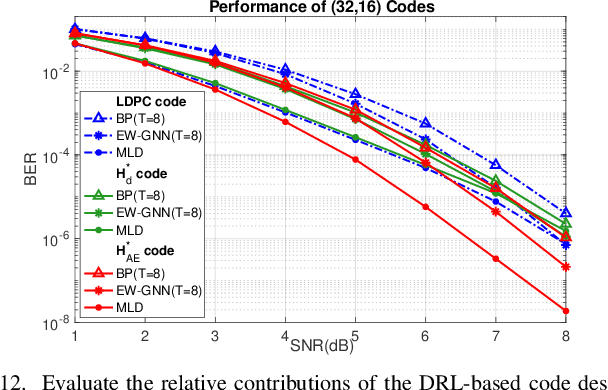
This paper presents a novel auto-encoder based end-to-end channel encoding and decoding. It integrates deep reinforcement learning (DRL) and graph neural networks (GNN) in code design by modeling the generation of code parity-check matrices as a Markov Decision Process (MDP), to optimize key coding performance metrics such as error-rates and code algebraic properties. An edge-weighted GNN (EW-GNN) decoder is proposed, which operates on the Tanner graph with an iterative message-passing structure. Once trained on a single linear block code, the EW-GNN decoder can be directly used to decode other linear block codes of different code lengths and code rates. An iterative joint training of the DRL-based code designer and the EW-GNN decoder is performed to optimize the end-end encoding and decoding process. Simulation results show the proposed auto-encoder significantly surpasses several traditional coding schemes at short block lengths, including low-density parity-check (LDPC) codes with the belief propagation (BP) decoding and the maximum-likelihood decoding (MLD), and BCH with BP decoding, offering superior error-correction capabilities while maintaining low decoding complexity.