 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTask-Oriented Co-Design of Communication, Computing, and Control for Edge-Enabled Industrial Cyber-Physical Systems
Mar 11, 2025This paper proposes a task-oriented co-design framework that integrates communication, computing, and control to address the key challenges of bandwidth limitations, noise interference, and latency in mission-critical industrial Cyber-Physical Systems (CPS). To improve communication efficiency and robustness, we design a task-oriented Joint Source-Channel Coding (JSCC) using Information Bottleneck (IB) to enhance data transmission efficiency by prioritizing task-specific information. To mitigate the perceived End-to-End (E2E) delays, we develop a Delay-Aware Trajectory-Guided Control Prediction (DTCP) strategy that integrates trajectory planning with control prediction, predicting commands based on E2E delay. Moreover, the DTCP is co-designed with task-oriented JSCC, focusing on transmitting task-specific information for timely and reliable autonomous driving. Experimental results in the CARLA simulator demonstrate that, under an E2E delay of 1 second (20 time slots), the proposed framework achieves a driving score of 48.12, which is 31.59 points higher than using Better Portable Graphics (BPG) while reducing bandwidth usage by 99.19%.
Aligning Task- and Reconstruction-Oriented Communications for Edge Intelligence
Feb 21, 2025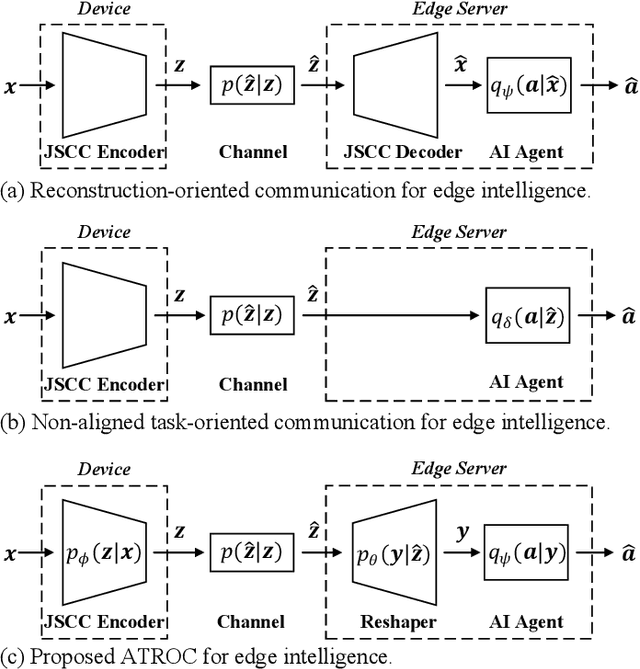
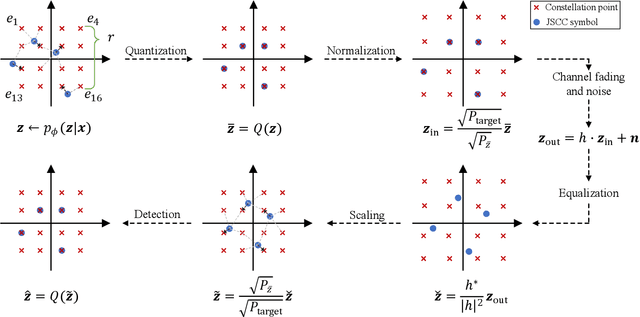
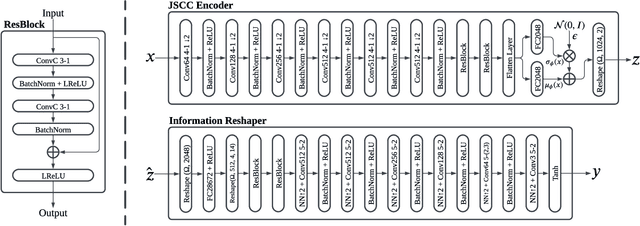
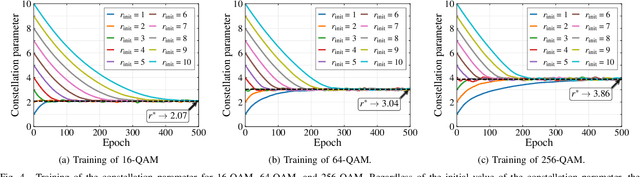
Existing communication systems aim to reconstruct the information at the receiver side, and are known as reconstruction-oriented communications. This approach often falls short in meeting the real-time, task-specific demands of modern AI-driven applications such as autonomous driving and semantic segmentation. As a new design principle, task-oriented communications have been developed. However, it typically requires joint optimization of encoder, decoder, and modified inference neural networks, resulting in extensive cross-system redesigns and compatibility issues. This paper proposes a novel communication framework that aligns reconstruction-oriented and task-oriented communications for edge intelligence. The idea is to extend the Information Bottleneck (IB) theory to optimize data transmission by minimizing task-relevant loss function, while maintaining the structure of the original data by an information reshaper. Such an approach integrates task-oriented communications with reconstruction-oriented communications, where a variational approach is designed to handle the intractability of mutual information in high-dimensional neural network features. We also introduce a joint source-channel coding (JSCC) modulation scheme compatible with classical modulation techniques, enabling the deployment of AI technologies within existing digital infrastructures. The proposed framework is particularly effective in edge-based autonomous driving scenarios. Our evaluation in the Car Learning to Act (CARLA) simulator demonstrates that the proposed framework significantly reduces bits per service by 99.19% compared to existing methods, such as JPEG, JPEG2000, and BPG, without compromising the effectiveness of task execution.
Task-Oriented Cross-System Design for Timely and Accurate Modeling in the Metaverse
Sep 11, 2023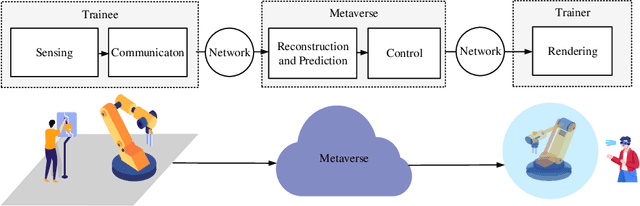
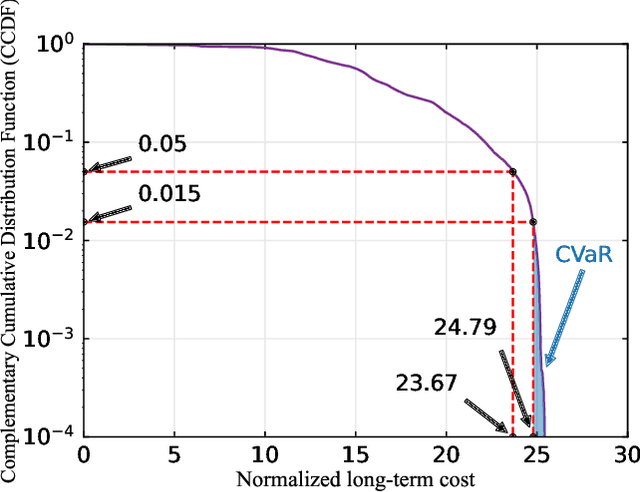
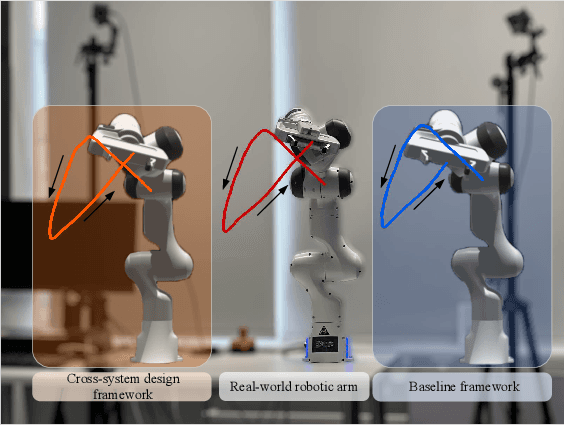
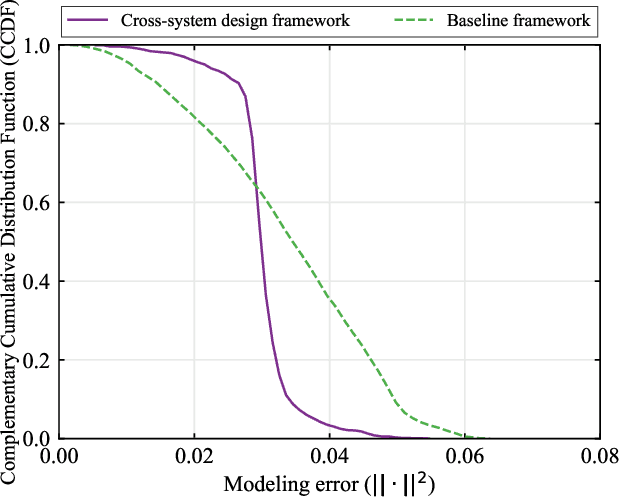
In this paper, we establish a task-oriented cross-system design framework to minimize the required packet rate for timely and accurate modeling of a real-world robotic arm in the Metaverse, where sensing, communication, prediction, control, and rendering are considered. To optimize a scheduling policy and prediction horizons, we design a Constraint Proximal Policy Optimization(C-PPO) algorithm by integrating domain knowledge from relevant systems into the advanced reinforcement learning algorithm, Proximal Policy Optimization(PPO). Specifically, the Jacobian matrix for analyzing the motion of the robotic arm is included in the state of the C-PPO algorithm, and the Conditional Value-at-Risk(CVaR) of the state-value function characterizing the long-term modeling error is adopted in the constraint. Besides, the policy is represented by a two-branch neural network determining the scheduling policy and the prediction horizons, respectively. To evaluate our algorithm, we build a prototype including a real-world robotic arm and its digital model in the Metaverse. The experimental results indicate that domain knowledge helps to reduce the convergence time and the required packet rate by up to 50%, and the cross-system design framework outperforms a baseline framework in terms of the required packet rate and the tail distribution of the modeling error.