 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTask-Oriented Co-Design of Communication, Computing, and Control for Edge-Enabled Industrial Cyber-Physical Systems
Mar 11, 2025This paper proposes a task-oriented co-design framework that integrates communication, computing, and control to address the key challenges of bandwidth limitations, noise interference, and latency in mission-critical industrial Cyber-Physical Systems (CPS). To improve communication efficiency and robustness, we design a task-oriented Joint Source-Channel Coding (JSCC) using Information Bottleneck (IB) to enhance data transmission efficiency by prioritizing task-specific information. To mitigate the perceived End-to-End (E2E) delays, we develop a Delay-Aware Trajectory-Guided Control Prediction (DTCP) strategy that integrates trajectory planning with control prediction, predicting commands based on E2E delay. Moreover, the DTCP is co-designed with task-oriented JSCC, focusing on transmitting task-specific information for timely and reliable autonomous driving. Experimental results in the CARLA simulator demonstrate that, under an E2E delay of 1 second (20 time slots), the proposed framework achieves a driving score of 48.12, which is 31.59 points higher than using Better Portable Graphics (BPG) while reducing bandwidth usage by 99.19%.
Aligning Task- and Reconstruction-Oriented Communications for Edge Intelligence
Feb 21, 2025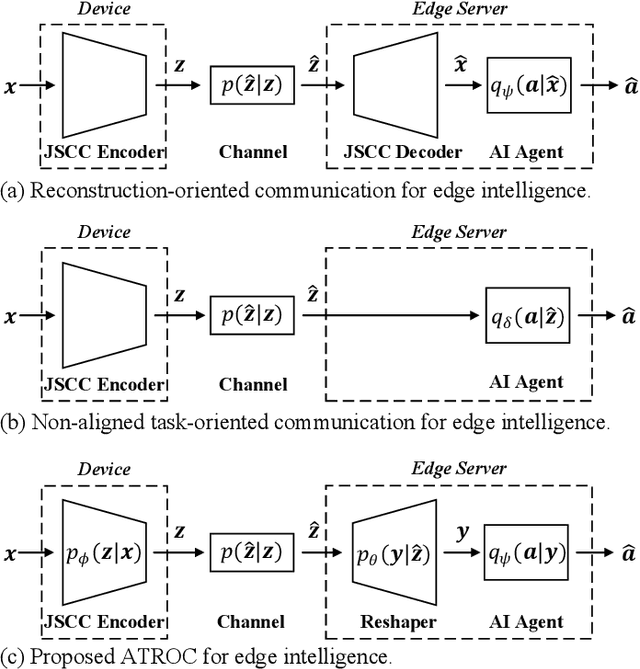
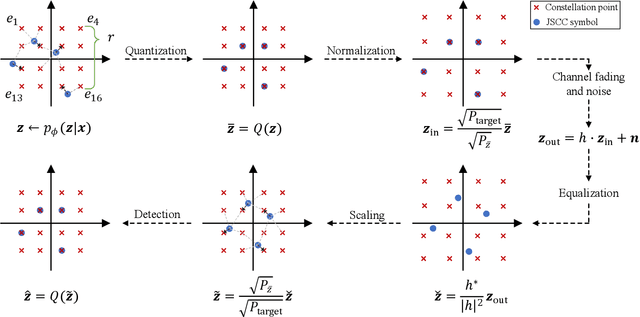
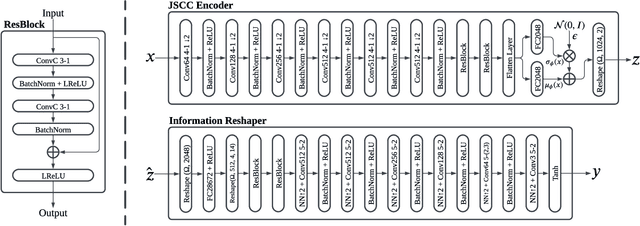
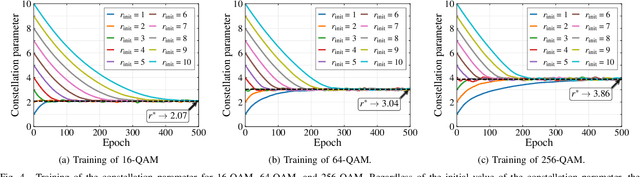
Existing communication systems aim to reconstruct the information at the receiver side, and are known as reconstruction-oriented communications. This approach often falls short in meeting the real-time, task-specific demands of modern AI-driven applications such as autonomous driving and semantic segmentation. As a new design principle, task-oriented communications have been developed. However, it typically requires joint optimization of encoder, decoder, and modified inference neural networks, resulting in extensive cross-system redesigns and compatibility issues. This paper proposes a novel communication framework that aligns reconstruction-oriented and task-oriented communications for edge intelligence. The idea is to extend the Information Bottleneck (IB) theory to optimize data transmission by minimizing task-relevant loss function, while maintaining the structure of the original data by an information reshaper. Such an approach integrates task-oriented communications with reconstruction-oriented communications, where a variational approach is designed to handle the intractability of mutual information in high-dimensional neural network features. We also introduce a joint source-channel coding (JSCC) modulation scheme compatible with classical modulation techniques, enabling the deployment of AI technologies within existing digital infrastructures. The proposed framework is particularly effective in edge-based autonomous driving scenarios. Our evaluation in the Car Learning to Act (CARLA) simulator demonstrates that the proposed framework significantly reduces bits per service by 99.19% compared to existing methods, such as JPEG, JPEG2000, and BPG, without compromising the effectiveness of task execution.